PROCEDIMIENTO DE LOCALIZACIÓN DE POSICIÓN AISTIDA POR ESTACIÓN BASE QUE CONOCE EL LÍMITE DE DATOS.
Dispositivo movil (10) que comprende un receptor configurado para recibir una primera senal de un satelite,
incluyendo la primera senal un mensaje de navegacion extendido con una secuencia PN; un correlacionador para correlacionar primeras muestras de senale con varios desfase de la secuencia PN; y caracterizado por: un integrador coherente (104) configurado para integrar coherentemente los productos de correlacion resultantes para un intervalo de integracion coherente particular, en el cual, cuando el intervalo de integracion coherente abarca un limite de datos del mensaje de navegacion, la integracion coherente se divide en una seccion anterior al limite de datos del mensaje de navegacion y una seccion posterior al limite de datos del mensaje de navegacion
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08013899.
Solicitante: QUALCOMM INCORPORATED.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 5775 MOREHOUSE DRIVE SAN DIEGO, CA 92121-1714 ESTADOS UNIDOS DE AMERICA.
Inventor/es: SIH, GILBERT, C., ZOU, QUIZHEN, KANG, INYUP.
Fecha de Publicación: .
Fecha Solicitud PCT: 3 de Septiembre de 1999.
Clasificación Internacional de Patentes:
- G01S19/25B
- G01S19/25D
- G01S19/30 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › relacionado con el código.
- G01S5/00R1B
Clasificación PCT:
- G01S5/00 G01S […] › Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Finlandia, Chipre.
PDF original: ES-2358623_T3.pdf

Fragmento de la descripción:
Antecedentes de la invención
I. Campo de la invención
La presente invención se refiere a la localización de posición. Más particularmente, la presente invención se refiere a un procedimiento y aparato novedosos y mejorados para llevar a cabo la localización de posición en sistemas de comunicaciones inalámbricas.
II. Descripción de la técnica relacionada
Tanto la regulación gubernamental como la demanda de los consumidores han conducido a la demanda de funcionalidad de localización de posición en los teléfonos celulares. El sistema de posicionamiento global (GPS) está actualmente disponible para llevar a cabo la localización de posición usando un receptor GPS con un conjunto de satélites que orbitan alrededor de la tierra. Por lo tanto es deseable introducir la funcionalidad GPS en un teléfono celular.
Sin embargo, los teléfonos celulares, son extremadamente sensibles a las consideraciones de coste, peso y consumo de potencia. De este modo, añadir simplemente un circuito adicional para llevar a cabo la localización FPS es una solución insatisfactoria para proporcionar una funcionalidad de localización de posición en un teléfono celular. De este modo, la presente invención se dirige a proporcionar una funcionalidad GPS en un sistema de telefonía celular con un mínimo de hardware, coste y consumo de potencia adicional.
El documento XP010060866 de Li Jet al, presentado el 11 de octubre de 1992, páginas 623-627 describe esquemas de adquisición en serie coherente para secuencias PN con modulación de datos.
Sumario de la invención
La presente invención es un procedimiento y aparato novedosos y mejorados para llevar a cabo una localización de posición en un sistema de comunicaciones inalámbricas. Según la invención se proporciona el dispositivo de la reivindicación 1. Según la invención se proporciona el aparato de la reivindicación 8. Según la invención se proporciona el procedimiento de la reivindicación 9.
Breve descripción de los dibujos
Las características, objetos y ventajas de la presente invención se harán más evidentes a partir de la siguiente descripción realizada a continuación cuando se toma en combinación con los dibujos en los cuales se identifican los caracteres de referencia similares correspondientemente a lo largo de los mismos y en los cuales:
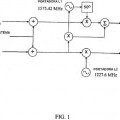
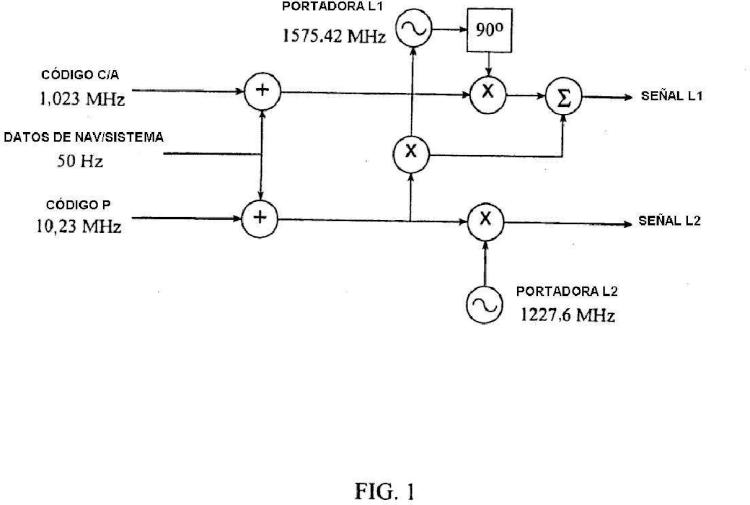
La figura 1 es un diagrama de bloques de un generador de forma de onda l Sistema de Posicionamiento Global (GPS)
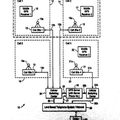
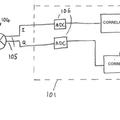
La figura 2 es un diagrama de bloques altamente simplificado de un sistema de telefonía celular configurado según el uso de la presente invención; La figura 3 es un diagrama de bloques de un receptor configurado según una realización de la invención; La figura 4 es otro diagrama de bloques del receptor representado en la figura 3; La figura 5 es un receptor configurado según una realización alternativa de la invención; La figura 6 es un diagrama de flujo de las etapas realizadas durante una operación de localización de posición; La figura 7 es un diagrama de bloques de un DPS configurado según una realización de la invención; La figura 8 es un diagrama de flujo que ilustra las etapas realizadas durante una búsqueda llevada a cabo según una
realización de la invención;
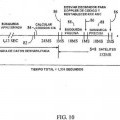
La figura 9 es una línea de tiempo que ilustra las fases a lo largo de las cuales se han llevado a cabo búsquedas precisas y bastas en una realización de la invención; La figura 10 es una línea de tiempo del proceso de búsqueda cuando se lleva a cabo según una realización de la
invención;
La figura 11 es un diagrama del espacio de búsqueda.
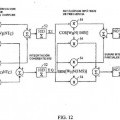
La figura 12 es un diagrama de bloques de un receptor según otra realización de la invención.
Descripción detallada de las realizaciones preferidas
Se describe un procedimiento y aparato novedosos y mejorados para llevar a cabo la localización de posición en sistemas de comunicaciones inalámbricas. La realización ejemplar se describe en e contexto del sistema de telefonía celular digital. Aunque el uso en este contexto es ventajoso, se pueden incorporar diferentes realizaciones de la invención en diferentes entornos o configuraciones. En general, los diversos sistemas descritos en la presente memoria se pueden formar usando procesadores controlados por software, circuitos integrados o lógica discreta, sin embargo, se prefiere la implementación en un circuito integrado. Los datos, instrucciones, comandos, información, señales, símbolos y elementos de código que se pueden referenciar a través de toda la aplicación se representan ventajosamente mediante voltajes, corrientes, ondas electromagnéticos campos magnéticos o partículas magnéticas campos ópticos o partículas ópticas, o una combinación de los mismos. Además, los bloques mostrados en cada diagrama de bloques pueden representar hardware o etapas de procedimiento.
La figura 1 es un diagrama de bloques del generador de forma de ondas del Sistema de Posicionamiento Global (GPS). El círculo con un signo más designa la suma del módulo 2. En general la constelación de GPS consiste en 24 satélites: 21 vehículos espaciales (SV) usados para la navegación y 3 de repuesto. Cada SV contiene un reloj que está sincronizado con el tiempo GPS monitorizando las estaciones terrestres. Para determinar una posición y un tiempo, un receptor GPS procesa las señales recibidas de diversos satélites. Se puede usar al menos 4 satélites para solucionar las 4 incógnitas (x, y, z, tiempo).
Cada SV transmite 2 portadoras de microondas: la portadora L1 de 1575,42 MHz, que transporta las señales usadas para el Servicio de Posicionamiento Estándar (SPS), y la portadora L2 de 1227,60 MHz, que transporta las señales necesarias para el Servicio de Posicionamiento Preciso (PPS). El PPS se usa para agencias gubernamentales y permite un mayor grado de precisión el posicionamiento.
La portador L1 se modula por el código de Adquisición Aproximada (C/A), un código pseudoaleatorio de 1023 elementos de código transmitido a 1.023 ;cps que se usa para servicios de localización de posición civil. (El código de Adquisición Aproximada o se debería confundir con las adquisiciones aproximada y precisa descritas en la presente memoria, que implican ambas el uso de los códigos C/A.) Cada satélite tiene su propio código C/A que se repite cada 1 ms. El código P, que se usa para PPS, es un código de 10,23 MHz, es decir de 267 días de longitud. El código P aparece en ambas portadoras pero tiene un desfase de 90º con el código C/A en la portadora L1. El mensaje de navegación de 50 Hz, al que realiza la función O exclusiva tanto con el código C/A como con el código P antes de la modulación de portadora, proporciona información de sistema tal como órbitas de satélite y correcciones de reloj.
La portador L1 se modula por el código de Adquisición Aproximada (C/A), un código pseudoaleatorio de 1023 elementos de código transmitido a 1.023 ;cps que se usa para servicios de localización de posición civil. Cada satélite tiene su propio código C/A que se repite cada 1 ms. El código P, que se usa para PPS, es un código de 10,23 MHz, es decir de 267 días de longitud. El código P aparece en ambas portadoras pero tiene un desfase de 90º con el código C/A en la portadora L1. El mensaje de navegación de 50 Hz, que realiza la operación O exclusiva tanto con el código C/A como P antes de la modulación de portadora, proporciona información de sistema tal como órbitas de satélite y correcciones de reloj.
La portador L1 se modula por el código de Adquisición Aproximada (C/A), un código pseudoaleatorio de 1023 elementos de código transmitido a 1.023 ;cps que se usa para servicios de localización de posición civil. Cada satélite tiene su propio código C/A que se repite cada 1 ms. El código P, que se usa para PPS, es un código de 10,23 MHz, es decir de 267 días de longitud. El código P aparece en ambas portadoras pero tiene un desfase de 90º con el código C/A en la portadora L1. El mensaje de navegación de 50 Hz, que realiza la operación O exclusiva tanto con el código C/A como P antes de la modulación de portadora, proporciona información de sistema tal como órbitas de satélite y correcciones de reloj.
Cada satélite tiene un código C/A que pertenece a una familia de códigos denominados códigos Gold. Se usan los códigos Gold porque la correlación cruzada entre ellos es pequeña. El código C/A se genera usando dos registros de desplazamiento de... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo móvil (10) que comprende
un receptor configurado para recibir una primera señal de un satélite, incluyendo la primera señal un mensaje de navegación extendido con una secuencia PN; un correlacionador para correlacionar primeras muestras de señale con varios desfase de la secuencia PN; y
caracterizado por:
un integrador coherente (104) configurado para integrar coherentemente los productos de correlación resultantes para un intervalo de integración coherente particular,
en el cual, cuando el intervalo de integración coherente abarca un límite de datos del mensaje de navegación, la integración coherente se divide en una sección anterior al límite de datos del mensaje de navegación y una sección posterior al límite de datos del mensaje de navegación
2. Dispositivo móvil según la reivindicación 1, en el cual el dispositivo móvil (10) se configura para:
sumar una suma de integración coherente en la sección anterior al límite de datos a una suma de integración coherente en la sección posterior al límite de datos para producir un primer resultado;
sustraer la suma de integración coherente en la sección posterior al limite de datos de la suma de integración coherente en la sección anterior al límite de datos para producir un segundo resultado; y
seleccionar uno del primer resultado o segundo resultado que tiene la magnitud máxima.
3. Dispositivo móvil (10) según la reivindicación 1 o la reivindicación 2, en el cual el dispositivo móvil (10) está configurado para recibir información acerca de los límites de datos del mensaje de navegación en un mensaje de ayuda.
4. Dispositivo móvil (10) según la reivindicación 1 o la reivindicación 2, en el cual el dispositivo móvil (10) está configurado para determinar el tiempo de los límites de datos del mensaje de navegación sin información de ayuda.
5. Dispositivo móvil (10) según cualquiera de las reivindicaciones 1, 2 o 4, en el cual el dispositivo móvil (10) está configurado para encontrar un límite de datos comparando la magnitud al cuadrado de la suma y la diferencia en la integración coherente.
6. Dispositivo móvil según la reivindicación 1, en el cual el receptor está configurado, además, para demodular la primera señal usando un reloj interno que tiene un error de frecuencia.
7. Dispositivo móvil (10) según la reivindicación 6, en el cual se usa información de tiempo para generar una señal de control para reducir el error de frecuencia del reloj interno.
8. Aparato que comprende:
medios para recibir una primera señal de un satélite, incluyendo la primera señal un mensaje de navegación extendido con una secuencia PN;
un correlacionador para correlacionar primeras muestras de señal con varios desfase de la secuencia PN; y caracterizado por:
medios para integrar coherentemente los productos de correlación resultantes para un intervalo de integración
coherente particular, en el cual, cuando el intervalo de integración coherente abarca un límite de datos del mensaje de navegación, la integración coherente se divide en una sección anterior al límite de datos del mensaje de navegación y una sección posterior al límite de datos del mensaje de navegación.
9. Procedimiento que comprende:
recibir una primera señal de un satélite, incluyendo la primera señal un mensaje de navegación extendido con una secuencia PN; correlacionar primeras muestras de señal con varios desfase de la secuencia PN; y caracterizado por: integrar coherentemente los productos de correlación resultantes para un intervalo de integración coherente particular,
en el cual, cuando el intervalo de integración coherente abarca un límite de datos del mensaje de navegación, la integración coherente se divide en una sección anterior al límite de datos del mensaje de navegación y una sección posterior al límite de datos del mensaje de navegación
10. Procedimiento según la reivindicación 9, que comprende, además: sumar una suma de integración coherente en la sección anterior al límite de datos a una suma de integración coherente en la sección posterior al límite de datos para producir un primer resultado;
sustraer la suma de integración coherente en la sección posterior al límite de datos de la suma de integración coherente en la sección anterior al límite de datos para producir un segundo resultado; y
seleccionar uno del primer resultado o segundo resultado que tiene la magnitud máxima. 11. Procedimiento según la reivindicación 9 o 10, que comprende, además, recibir información acerca de los límites de datos del mensaje de navegación en un mensaje de ayuda.
12. Procedimiento según la reivindicación 9 o 10, que comprende, además, determinar el tiempo de los límites de datos del mensaje de navegación sin información de ayuda.
13. Procedimiento según la reivindicación 9, 10 o 12, que comprende, además, encontrar un límite de datos 15 comparando la magnitud al cuadrado de la suma y la diferencia en la integración coherente.
14. Procedimiento según la reivindicación 9, que comprende, además, demodular la primera señal usando un reloj interno que tiene un error de frecuencia.
15. Procedimiento según la reivindicación 14, en el cual se usa información de tiempo para generar una señal de control para reducir el error de frecuencia del reloj interno. 16. Soporte legible por ordenador que comprende instrucciones que cuando se ejecutan por un procesador, dan como resultado la ejecución de las etapas del procedimiento de cualquiera de las reivindicaciones 9 a 15.
Patentes similares o relacionadas:
RECEPTOR GPS PERFECCIONADO QUE UTILIZA INFORMACIÓN DE LA POSICIÓN DE LOS SATÉLITES PARA COMPENSAR EL EFECTO DOPPLER, del 9 de Febrero de 2012, de SNAPTRACK INC.: Procedimiento para determinar la posición de una unidad remota , que comprende: recibir, en dicha unidad remota , datos de almanaque de […]
 PROCEDIMIENTO Y APARATO PARA LA DETERMINACIÓN DEL TIEMPO EN UN SISTEMA DE POSICIONAMIENTO POR SATÉLITE, del 9 de Mayo de 2011, de SNAPTRACK INCORPORATED: Un procedimiento de resolución del tiempo de referencia en una primera entidad que recibe señales de distancias desde una pluralidad de satélites y que tiene una referencia […]
PROCEDIMIENTO Y APARATO PARA LA DETERMINACIÓN DEL TIEMPO EN UN SISTEMA DE POSICIONAMIENTO POR SATÉLITE, del 9 de Mayo de 2011, de SNAPTRACK INCORPORATED: Un procedimiento de resolución del tiempo de referencia en una primera entidad que recibe señales de distancias desde una pluralidad de satélites y que tiene una referencia […]
SISTEMA PARA SEGUIR LA TRAYECTORIA BASADO EN GPS, del 23 de Marzo de 2011, de SPORTVISION INC: Un método para seguir la trayectoria de un objeto, que comprende los pasos de: usar GPS para seguir la trayectoria del objeto; recibir datos GPS acerca […]
 SISTEMA Y PROCEDIMIENTO DE REFERENCIA DE POSICIONAMIENTO DE SATELITES, del 17 de Mayo de 2010, de SNAPTRACK INC.: Un sistema de procesamiento de la información de la posición de satélites, comprendiendo dicho sistema:
un primer sistema de posicionamiento […]
SISTEMA Y PROCEDIMIENTO DE REFERENCIA DE POSICIONAMIENTO DE SATELITES, del 17 de Mayo de 2010, de SNAPTRACK INC.: Un sistema de procesamiento de la información de la posición de satélites, comprendiendo dicho sistema:
un primer sistema de posicionamiento […]
 RECEPTOR GPS MEJORADO QUE UTILIZA UN ENLACE DE COMUNICACIONES, del 19 de Abril de 2010, de SNAPTRACK INC.: PROCEDIMIENTOS Y APARATOS PARA CALCULAR MEDIANTE UN RECEPTOR DE LOCALIZACION MEDIANTE SATELITES (SPS) UN DOPPLER APROXIMADO A PARTIR DE UNA […]
RECEPTOR GPS MEJORADO QUE UTILIZA UN ENLACE DE COMUNICACIONES, del 19 de Abril de 2010, de SNAPTRACK INC.: PROCEDIMIENTOS Y APARATOS PARA CALCULAR MEDIANTE UN RECEPTOR DE LOCALIZACION MEDIANTE SATELITES (SPS) UN DOPPLER APROXIMADO A PARTIR DE UNA […]
 Procesador para un receptor de radio, del 31 de Octubre de 2019, de QINETIQ LIMITED: Un sistema de procesador para un receptor de radio, el sistema de procesador se adapta para procesar señales de Espectro Ensanchado de Secuencia Directa (DS-SS), dicho […]
Procesador para un receptor de radio, del 31 de Octubre de 2019, de QINETIQ LIMITED: Un sistema de procesador para un receptor de radio, el sistema de procesador se adapta para procesar señales de Espectro Ensanchado de Secuencia Directa (DS-SS), dicho […]
Un receptor y transmisor para uso en un sistema de navegación por satélite, del 3 de Mayo de 2017, de EUROPEAN SPACE AGENCY: Un receptor para uso con un sistema de navegación por satélite que comprende una constelación de múltiples satélites en la que cada satélite […]
Procedimiento de correlación de una señal recibida de radionavegación por satélite y dispositivo de correlación que implementa el procedimiento, del 31 de Agosto de 2016, de THALES: Procedimiento de correlación de una señal (S) recibida de radionavegación por satélite compuesta por una primera señal piloto modulada con un primer código […]