SISTEMA PARA SEGUIR LA TRAYECTORIA BASADO EN GPS.
Un método para seguir la trayectoria de un objeto, que comprende los pasos de:
usar GPS para seguir la trayectoria del objeto; recibir datos GPS acerca del objeto (130, 132) que comprenden al menos un tiempo GPS asociado a los datos GPS y la ubicación trimensional del objeto; recibir un vídeo que incluye dicho objeto (556), estando caracterizado el método por: identificar una diferencia entre dicho tiempo GPS y un tiempo de vídeo asociado a dicho vídeo (546); usar dicha diferencia para ajustar dichos datos GPS a un fotograma de vídeo que contiene la imagen del objeto cuya posición se debe determinar; determinar la posición de una imagen del objeto en dicho vídeo (564) utilizando dicha ubicación trimensional GPS del objeto; y crear un efecto para resaltar en o cerca de la posición determinada del objeto
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2001/020027.
Solicitante: SPORTVISION INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 31ST FLOOR, 1450 BROADWAY NEW YORK, NY 10018 ESTADOS UNIDOS DE AMERICA.
Inventor/es: MILNES, KENNETH A., HONEY,Stanley,K. , MCGUFFIN,James,O. , LAZAR,Matthew,T. , PEON,Roberto,J. , GLOUDEMANS,James,R.
Fecha de Publicación: .
Fecha Solicitud PCT: 22 de Junio de 2001.
Clasificación Internacional de Patentes:
- G01C21/28 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › con correlación de datos provenientes de varios instrumentos de navegación.
- G01S5/00R1A
- G01S5/00R1B
- G01S5/00R2A
- G01S5/14B
- G01S5/14B3
- G01S5/14B4
Clasificación PCT:
- G01S1/00 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › Balizas o sistemas de balizas que transmiten señales que tienen una o más características que pueden ser detectadas por receptores no direccionales y que definen direcciones, posiciones o líneas de posición fijas con relación a los transmisores de las balizas; Receptores asociados a ellas (fijación de la posición mediante la coordinación de una pluralidad de determinaciones de líneas de posición o direcciones G01S 5/00).
- G01S5/14 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
- G11B27/30 G […] › G11 REGISTRO DE LA INFORMACION. › G11B REGISTRO DE LA INFORMACION BASADO EN UN MOVIMIENTO RELATIVO ENTRE EL SOPORTE DE REGISTRO Y EL TRANSDUCTOR (registro de valores medidos según un procedimiento que no necesita el uso de un transductor para la reproducción G01D 9/00; aparatos de registro o de reproducción que utilizan una banda marcada por un procedimiento mecánico, p. ej. una banda de papel perforada, o que utilizan soportes de registro individuales, p. ej. fichas perforadas o fichas magnéticas G06K; transferencia de datos de un tipo de soporte de registro a otro G06K 1/18; circuitos para el acoplamiento de la salida de un dispositivo de reproducción a un receptor radio H04B 1/20; cabezas de lectura para gramófonos o transductores acústicos electromecánicos o sus circuitos H04R). › G11B 27/00 Montaje; Indexación; Direccionamiento; Temporización o sincronización; Monitorización; Medida del avance de una cinta. › sobre la misma pista que el registro principal.
- H04N7/088 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04N TRANSMISION DE IMAGENES, p. ej. TELEVISION. › H04N 7/00 Sistemas de televisión (detalles H04N 3/00, H04N 5/00; métodos y arreglos, para la codificación, decodificación, compresión o descompresión de señales de vídeo digital H04N 19/00; distribución selectiva de contenido H04N 21/00). › siendo la señal insertada digital.
Clasificación antigua:
- H04B7/185 H04 […] › H04B TRANSMISION. › H04B 7/00 Sistemas de radiotransmisión, es decir, utilizando un campo de radiación (H04B 10/00, H04B 15/00 tienen prioridad). › Estaciones espaciales o aéreas (H04B 7/204 tiene prioridad).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Esta solicitud reivindica el beneficio de la solicitud provisional US 60/213,684, “Locating an object using GPS with additional data”, presentada el 23 de junio del 2000; la solicitud provisional US 60/233,360, “System for tracking automóviles”, presentada el 18 de septiembre del 2000; y la solicitud provisional US 60/295,310, “Track model constraing enhancement for GPS receiver”, presentada el 1 de junio del 2001. 5
Campo de la invención
La presente invención está dirigida a un sistema que utiliza receptores GPS y otros sensores para adquirir diferentes informaciones acerca de uno o más objetos en un evento.
La presentación en televisión de eventos deportivos necesita mejorarse. US 5,642,285 describe un sistema de navegación GPS con un puerto de salida de datos para comunicar una estimación de posición. US 5,479,351 describe 10 un receptor GPS que comprende un puerto de salida de datos para comunicar una información de código temporal que puede ser introducida a dispositivos en un evento. US 6,020,851 describe un sistema de monitorización de carreras de coches en el que se generan réplicas de los coches de carreras basándose en datos de un GPS rudimentario. Debido al tamaño y velocidad de algunos objetos y a la distancia de la cámara de televisión de los objetos de interés, algunos objetos en el evento deportivo son difíciles de apreciar en la pantalla de televisión. Para compensar los objetos que son 15 difíciles de apreciar en televisión, las emisoras de televisión emplean lentes de aumento. Sin embargo, el campo de visión limitado de una cámara dotada de lente de aumento evita que el objeto se aprecie dentro del contexto del campo de juego y evita que el observador vea otros objetos que forman parte del evento deportivo. Adicionalmente, incluso con lentes de aumento, algunos objetos y/o detalles siguen siendo difíciles de apreciar en televisión.
En las carreras de coches, por ejemplo, es difícil que un televidente identifique los coches, determine cuántas 20 vueltas ha dado un coche particular, el orden de los coches (por ejemplo, primer lugar, segundo lugar, tercer lugar, etc.) y la velocidad instantánea de un coche. Adicionalmente, debido al gran tamaño del circuito una cámara sólo puede obtener imágenes de una parte del circuito y los televidentes pueden perderse la acción que se desarrolla en otras partes del circuito. Otros eventos deportivos y no deportivos presentan también inconvenientes similares.
Además, los emisores podrían mantener mejor el interés si presentasen a los televidentes información adicional 25 acerca del evento y permitiesen el uso de esa información de un modo emocionante
Por tanto, existe una necesidad de mejorar la presentación de objetos de eventos deportivos por televisión.
De acuerdo con la presente invención, se proporciona un método para seguir la trayectoria de al menos un objeto según la reivindicación 1 y un aparato según la reivindicación 13. En sus realizaciones preferidas, se proporciona al menos un sistema que emplea: 30
receptores GPS y otros sensores para adquirir datos acerca de uno o más objetos en un evento. Estos datos adquiridos por los receptores GPS y los sensores se pueden utilizar para determinar diferentes estadísticas acerca de los objetos y para mejorar una presentación en vídeo de los objetos. En una realización, los datos adquiridos se utilizan para determinar una posición tridimensional de un objeto, determinar la posición de una imagen del objeto en un video y mejorar el vídeo en función de eso. 35
Un uso de la presente invención se realiza con un sistema para seguir la trayectoria de automóviles en una carrera. El sistema determina estadísticas acerca de los automóviles y mejora una presentación en vídeo de la carrera. En varias realizaciones, el sistema puede incluir sensores de RPM, sensores de posición de frenos, sensores de posición de acelerador, sensores de nivel de combustible, sensores de temperatura, sensores de transmisión de posición, cámaras, etc. Ademá de a una carrera de automóviles, la presente invención se puede utilizar en otros ámbitos 40 como otros eventos deportivos y eventos no deportivos.
En cualquier sistema que utilice sensores, la fiabilidad de los sensores puede constituir una preocupación. En una realización de la presente invención, un subconjunto de uno o más sensores se puede utilizar para determinar los datos adquiridos normalmente por un segundo conjunto de uno o más sensores si el segundo subconjunto de uno o más sensores no está proporcionando datos válidos. 45
Otra realización de la presente invención sincroniza datos entre diferentes sensores.
En una implementación de la presente invención, se resaltan los objetos móviles en un vídeo mediante un indicador que cambia de orientación según los movimientos del objeto que se está resaltando. Otra mejora incluye proporcionar datos acerca del objeto que se está resaltando y conectar visualmente esos datos al indicador o a la imagen del objeto. 50
Diferentes realizaciones de la presente invención proporcionan diferentes tipos de datos al observador o usuario. Por ejemplo, en la realización de las carreras de coches, se puede proporcionar al usuario información acerca de la posición de un coche en la carrera (por ejemplo, primer lugar, segundo lugar, etc), tiempo perdido con relación al lugar, número de vuelta, fracción de vuelta, velocidad instantánea, RPM, posición del acelerador, posición del freno,
efecto de la resistencia aerodinámica, marcha empleada, nivel de combustible, una predicción de cuándo se agotará el combustible del coche, cuándo el coche ha cruzado determinados lugares de la pista, cuándo ocurre un accidente y la posición de un coche con relación a otros coches que podrían haber corrido previamente.
La presente invención se puede conseguir empleando hardware, software, o una combinación de hardware y software. El software empleado para la presente invención se almacena en uno o más medios de almacenamiento 5 legibles mediante un procesador, incluyendo discos duros, CD-ROMs, DVDs, discos ópticos, discos flexibles, unidades de cinta, memorias flash, RAM, ROM u otros dispositivos de almacenamiento adecuados. En realizaciones alternativas, todo o parte del software se puede sustituir por hardware dedicado, incluyendo circuitos integrados adaptados, matrices de puertas, FPGAs, PLDs y ordenadores especiales. En una implementación, la presente invención se lleva a cabo mediante una combinación de software, ordenadores (uno o más procesadores, uno o más dispositivos de 10 almacenamiento, de E/S, etc.), sensores y equipamiento de comunicación.
Estos y otros objetos y ventajas de la presente invención serán más evidentes a partir de la siguiente descripción, en la cual la realización preferida de la invención se ha descrito en conjunto con los dibujos.
BREVE DESCRIPCIÓN DE LOS DIBUJOS
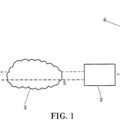
La Figura 1 es un diagrama de bloques de una realización de un sistema de seguimiento de trayectoria. 15
La Figura 2 es un diagrama de bloques de una realización de una unidad DAPS.
La Figura 3 es un diagrama de flujo que describe el proceso de adquisición de datos en una unidad DAPS.
La Figura 4 es un diagrama de flujo que describe un proceso de comunicación de una unidad DAPS.
La Figura 5 es un diagrama de flujo que describe un proceso para crear un modelo de seguimiento de trayectoria. 20
La Figura 6 es un diagrama de bloques de un receptor GPS.
La Figura 7 es un diagrama de flujo que describe un proceso llevado a cabo por el receptor GPS.
La Figura 8 es un diagrama de flujo que describe un proceso para identificar un triángulo apropiado para el modelo de seguimiento.
La Figura 9 es un diagrama de bloques de una estación base. 25
La Figura 10 es un diagrama de flujo que describe el funcionamiento de una estación base.
La Figura 11 es un diagrama de bloques de los componentes en la ubicación de una cámara.
La Figura 12 es un diagrama de bloques de la electrónica de una cámara remota.
La Figura 13 es un diagrama de bloques de los componentes en el centro de producción.
La Figura 14 es un diagrama de flujo que describe el proceso de sincronizar tiempo GPS y tiempo de vídeo....
Reivindicaciones:
1. Un método para seguir la trayectoria de un objeto, que comprende los pasos de:
usar GPS para seguir la trayectoria del objeto;
recibir datos GPS acerca del objeto (130, 132) que comprenden al menos un tiempo GPS asociado a los datos GPS y la ubicación trimensional del objeto; 5
recibir un vídeo que incluye dicho objeto (556),
estando caracterizado el método por:
identificar una diferencia entre dicho tiempo GPS y un tiempo de vídeo asociado a dicho vídeo (546);
usar dicha diferencia para ajustar dichos datos GPS a un fotograma de vídeo que contiene la imagen del objeto cuya posición se debe determinar; 10
determinar la posición de una imagen del objeto en dicho vídeo (564) utilizando dicha ubicación trimensional GPS del objeto; y
crear un efecto para resaltar en o cerca de la posición determinada del objeto.
2. Un método de acuerdo con la reivindicación 1, donde dicho paso de identificar (546) incluye los pasos de:
determinar un tiempo asociado a dicho tiempo GPS en un comienzo de un fotograma en dicho vídeo; y 15
determinar un tiempo asociado a dicho tiempo de vídeo en el inicio de dicho fotograma en dicho vídeo.
3. Un método de acuerdo con la reivindicación 2, donde dicho paso de determinar dicho tiempo asociado a dicho tiempo GPS incluye los pasos de:
almacenar una serie de tiempos asociados a dicho tiempo GPS; e
interpolar entre una pluralidad de dichos tiempos en dichas series de tiempos para obtener un tiempo 20 correspondiente a dicho tiempo asociado con dicho tiempo de vídeo en dicho comienzo de dicho fotograma en dicho vídeo.
4. El método de cualquier reivindicación anterior, que comprende proporcionar datos acerca del objeto que se está resaltando y conectar visualmente los datos con la imagen resaltada del objeto.
5. El método de cualquier reivindicación precedente, donde la función de resaltar cambia su orientación de 25 acuerdo con la orientación del objeto que se está resaltando.
6. El método de acuerdo con cualquier reivindicación precedente, que además comprende determinar una estadística acerca de dicho objeto, y añadir dicha estadística a dicho vídeo.
7. El método de acuerdo con la reivindicación 6, que además comprende utilizar dichos datos GPS para determinar dicha estadística acerca del objeto. 30
8. Un método de acuerdo con cualquiera de las reivindicaciones 1 a 5, donde dicho método además incluye los pasos de:
determinar una estadística acerca de dicho objeto y generar al menos una mejora, donde dicha al menos una mejora se obtiene a partir de las estadísticas determinadas acerca de dicho objeto; y
mejorar la imagen de dicho objeto en dicho vídeo utilizando al menos una mejora (566), comprendiendo el 35 método preferiblemente además recoger datos de sensor acerca de dicho objeto y reenviar dichos datos de sensor a dicho centro de producción.
9. Un método de acuerdo con la reivindicación 6, 7 u 8, donde dicha estadística es la velocidad, aceleración, número de vueltas, fracción de vuelta, posición de carrera, tiempo por detrás del líder, información de bucle virtual, predicción de agotamiento de combustible, y datos de sensor faltante. 40
10. Un método de acuerdo con una cualquiera de las reivindicaciones precedentes, donde dicho objeto es participar en una carrera.
11. Un método de acuerdo con una cualquiera de las reivindicaciones precedentes, donde dicho método incluye además el paso de:
proporcionar información de corrección de error correspondiente a un error en la temporización de tiempo, donde dichos datos GPS incluyen datos de posición obtenidos utilizando dicha información de corrección de error.
12. Un método de acuerdo con una cualquiera de las reivindicaciones precedentes, donde dicho método incluye además los pasos de:
reenviar dichos datos GPS a un centro (50) de producción, donde dicho paso de reenviar dichos datos a dicho 5 centro (50) de producción incluye los pasos de:
reenviar dichos datos GPS a al menos una estación base (22, 24, 26, 28); y
reenviar dichos datos GPS desde dicha al menos una estación base (22, 24, 26, 28) a dicho centro (50) centro de producción.
13. Un aparato, que comprende: 10
un interfaz de comunicación;
uno o más dispositivos de almacenamiento; y
uno o más procesadores en comunicación con dicho uno o más dispositivos de almacenamiento y dicho interfaz de comunicación, estando dicho uno o más procesadores programado para llevar a cabo un método para seguir la trayectoria de al menos un objeto, comprendiendo dicho método los pasos de: 15
usar GPS para seguir la trayectoria del objeto;
recibir datos GPS acerca del objeto (130, 132), comprendiendo al menos un tiempo GPS asociado a los datos GPS y la ubicación tridimensional del objeto;
recibir un vídeo que incluye dicho objeto (556);
estando caracterizado el método por: 20
identificar una diferencia entre dicho tiempo GPS y un tiempo de vídeo asociado a dicho vídeo (546);
utilizar dicha diferencia para ajustar datos GPS a un fotograma de vídeo que contiene la imagen del objeto cuya posición se debe determinar;
determinar la posición de una imagen del objeto en dicho vídeo (564) utilizando dicha ubicación GPS tridimensional del objeto; y 25
crear una función de resalte en o cerca de la posición determinada del objeto.
14. Un aparato de acuerdo con la reivindicación 13, donde dicho paso de identificar (546) incluye los pasos de:
determinar un tiempo asociado a dicho tiempo GPS al principio de un fotograma en dicho vídeo; y
determinar un tiempo asociado a dicho tiempo de vídeo al comienzo de dicho fotograma en dicho vídeo.
15. Un aparato de acuerdo con la reivindicación 14, donde dicho paso de determinar dicho tiempo asociado a dicho 30 tiempo GPS incluye los pasos de:
almacenar una serie de tiempos asociados a dicho tiempo GPS; e
interpolar entre una pluralidad de dichos tiempos en dicha serie de tiempos para obtener un tiempo correspondiente a dicho tiempo asociado a dicho tiempo de vídeo al inicio de dicho fotograma en dicho vídeo.
16. El aparato de una cualquiera de las reivindicaciones 13 a 15, donde dicho método además comprende 35 determinar estadísticas acerca de dicho objeto, y añadir dichas estadísticas a dicho vídeo.
17. Un aparato de acuerdo con una cualquiera de las reivindicaciones 13 a 15, donde dicho método además comprende los pasos de:
Determinar una estadística acerca de dicho objeto, y generar al menos una mejora, donde dicha al menos una mejora se obtiene a partir de dicha estadística determinada acerca de dicho objeto, comprendiendo además el 40 método mejorar la imagen de dicho objeto en dicho vídeo utilizando al menos una mejora, donde dicha estadística se selecciona entre velocidad, aceleración, número de vueltas, fracción de vuelta, posición en la carrera, tiempo por detrás del líder, información de bucle virtual, predicción de agotamiento de combustible, y datos de sensor faltante.
18. Un aparato de acuerdo con una cualquiera de las reivindicaciones 13 a 17, donde dicho aparato además incluye:
al menos un receptor (14) adaptado para recibir señales GPS para seguir la trayectoria de dicho objeto, donde dichos datos GPS se obtienen de señales GPS; y
al menos un sensor adaptado para recoger datos de sensor acerca de dicho objeto. 5
19. Un sistema que comprende el aparato de la reivindicación 18, donde dicho sistema además incluye:
una estación base (22, 24, 26, 28) adaptada para recibir dichos datos GPS y dichos datos de sensor; y
un centro (50) de producción adaptado para recibir dichos datos GPS y dichos datos de sensor de dicha estación base (22, 24, 26, 28).
20. El aparato de la reivindicación 13, donde dicho procesador está programado para llevar a cabo un método de 10 acuerdo con cualquiera de las reivindicaciones 1 a 12.
21. Uno o más dispositivos de almacenamiento legibles por un procesador que tienen código legible por un procesador en dichos dispositivos de almacenamiento legibles por un procesador, y dicho código legible por un procesador siendo capaz de programar uno o más procesadores para llevar a cabo el método según cualquiera de las reivindicaciones 1 a 12. 15
22. Uno o más dispositivos de almacenamiento legibles por un procesador de acuerdo con la reivindicación 21, donde dicho método además incluye los pasos de:
recibir datos GPS acerca de dicho objeto (130);
recibir datos de sensor acerca de dicho objeto (132);
determinar una estadística acerca de dicho objeto, donde dicha estadística no está incluida en dichos datos 20 GPS o dichos datos de sensor.
23. Uno o más dispositivos de almacenamiento legibles por un procesador de acuerdo con la reivindicación 22, donde dicha estadística está incluida en el grupo de estadísticas consistente en: velocidad, aceleración, número de vueltas, fracción de vuelta, posición en carrera, tiempo por detrás del líder, información de bucle virtual, predicción de agotamiento de combustible, y datos de sensor faltante. 25
24. Uno o más dispositivos de almacenamiento legibles por un procesador de acuerdo con la reivindicación 21, 22 ó 23, donde dicho método incluye además el paso de:
generar una mejora para dicha imagen en dicho vídeo; y
mejorar dicha imagen en dicho vídeo con dicha mejora.
Patentes similares o relacionadas:
 PROCEDIMIENTO Y APARATO PARA LA DETERMINACIÓN DEL TIEMPO EN UN SISTEMA DE POSICIONAMIENTO POR SATÉLITE, del 9 de Mayo de 2011, de SNAPTRACK INCORPORATED: Un procedimiento de resolución del tiempo de referencia en una primera entidad que recibe señales de distancias desde una pluralidad de satélites y que tiene una referencia […]
PROCEDIMIENTO Y APARATO PARA LA DETERMINACIÓN DEL TIEMPO EN UN SISTEMA DE POSICIONAMIENTO POR SATÉLITE, del 9 de Mayo de 2011, de SNAPTRACK INCORPORATED: Un procedimiento de resolución del tiempo de referencia en una primera entidad que recibe señales de distancias desde una pluralidad de satélites y que tiene una referencia […]
 PROCEDIMIENTO DE DETERMINACION AUTONOMA DE LA ORIENTACION DE UN RECEPTOR GNSS, CON UNA SOLA ANTENA, A PARTIR DE SU INFORMACION IONOSFERICAS, del 1 de Julio de 2007, de UNIVERSITAT POLITECNICA DE CATALUNYA: Procedimiento de determinación autónoma de la orientación de un receptor GNSS, con una sola antena, a partir de su información ionosférica consistente […]
PROCEDIMIENTO DE DETERMINACION AUTONOMA DE LA ORIENTACION DE UN RECEPTOR GNSS, CON UNA SOLA ANTENA, A PARTIR DE SU INFORMACION IONOSFERICAS, del 1 de Julio de 2007, de UNIVERSITAT POLITECNICA DE CATALUNYA: Procedimiento de determinación autónoma de la orientación de un receptor GNSS, con una sola antena, a partir de su información ionosférica consistente […]
 SISTEMA Y PROCEDIMIENTO PARA INTEGRACION DE UNA RED INFORMATICA INALAMBRICA EN TECNOLOGIA DE DETERMINACION DE POSICION, del 18 de Octubre de 2010, de QUALCOMM INCORPORATED: Un dispositivo de comunicación móvil para suministrar información de posición a una aplicación, que comprende:
primeros medios para recibir una solicitud […]
SISTEMA Y PROCEDIMIENTO PARA INTEGRACION DE UNA RED INFORMATICA INALAMBRICA EN TECNOLOGIA DE DETERMINACION DE POSICION, del 18 de Octubre de 2010, de QUALCOMM INCORPORATED: Un dispositivo de comunicación móvil para suministrar información de posición a una aplicación, que comprende:
primeros medios para recibir una solicitud […]
 SISTEMA DE NAVEGACION PARA VEHICULOS, del 8 de Septiembre de 2010, de HONDA MOTOR CO., LTD.: Un sistema de navegación para vehículos que puede presentar de manera precisa la posición de un vehículo con el sistema de navegación montado en el mismo, […]
SISTEMA DE NAVEGACION PARA VEHICULOS, del 8 de Septiembre de 2010, de HONDA MOTOR CO., LTD.: Un sistema de navegación para vehículos que puede presentar de manera precisa la posición de un vehículo con el sistema de navegación montado en el mismo, […]
 PROCEDIMIENTO Y SISTEMA DE LOCALIZACION Y DISPOSITIVO PORTATIL LOCALIZABLE, del 30 de Agosto de 2010, de NAVENTO TECHNOLOGIES, S.L: Procedimiento y sistema de localización y dispositivo portátil localizable.
Procedimiento de localización de un dispositivo portátil desde […]
PROCEDIMIENTO Y SISTEMA DE LOCALIZACION Y DISPOSITIVO PORTATIL LOCALIZABLE, del 30 de Agosto de 2010, de NAVENTO TECHNOLOGIES, S.L: Procedimiento y sistema de localización y dispositivo portátil localizable.
Procedimiento de localización de un dispositivo portátil desde […]
 REDUCCION DE INTERFERENCIA CRUZADA EN UN RECEPTOR GPS Y UN SISTEMA DE COMUNICACION COMBINADOS, del 24 de Junio de 2010, de SNAPTRACK INC.: Un método para reducir la interferencia en un receptor de un sistema de posicionamiento por satélites, debida a las transmisiones […]
REDUCCION DE INTERFERENCIA CRUZADA EN UN RECEPTOR GPS Y UN SISTEMA DE COMUNICACION COMBINADOS, del 24 de Junio de 2010, de SNAPTRACK INC.: Un método para reducir la interferencia en un receptor de un sistema de posicionamiento por satélites, debida a las transmisiones […]
 SISTEMAS INTEGRADOS DE CARTOGRAFIA Y DE AUDIO, del 1 de Junio de 2010, de NAVICO, INC: Un sistema de cartografía por sónar integrado que comprende: un transductor de sónar para emitir una señal de sónar a través de un […]
SISTEMAS INTEGRADOS DE CARTOGRAFIA Y DE AUDIO, del 1 de Junio de 2010, de NAVICO, INC: Un sistema de cartografía por sónar integrado que comprende: un transductor de sónar para emitir una señal de sónar a través de un […]
 DISPOSITIVO QUE MONTADO EN UN VEHICULO, PROPORCIONA UNA SERIE DE SERVICIOS ORIENTADOS A UNA CIRCULACION CONTROLADA, del 8 de Enero de 2010, de NEW TECHNOLOGIES GLOBAL SYSTEMS SL: El dispositivo, que se coloca en un vehículo, dispone entre otros, de los siguientes sensores:
- Un módulo embebido GSM/GPRS.
- Un módulo de memoria con las carreteras […]
DISPOSITIVO QUE MONTADO EN UN VEHICULO, PROPORCIONA UNA SERIE DE SERVICIOS ORIENTADOS A UNA CIRCULACION CONTROLADA, del 8 de Enero de 2010, de NEW TECHNOLOGIES GLOBAL SYSTEMS SL: El dispositivo, que se coloca en un vehículo, dispone entre otros, de los siguientes sensores:
- Un módulo embebido GSM/GPRS.
- Un módulo de memoria con las carreteras […]