RECEPTOR GPS PERFECCIONADO QUE UTILIZA INFORMACIÓN DE LA POSICIÓN DE LOS SATÉLITES PARA COMPENSAR EL EFECTO DOPPLER.
Procedimiento para determinar la posición de una unidad remota (20),
que comprende: recibir, en dicha unidad remota (20), datos de almanaque de satélites comprimidos u otra representación de datos de almanaque para una pluralidad de satélites de un sistema de posicionamiento por satélite, desde una estación base situada en una posición separada o desde otro satélite que emula una estación base; determinar la hora del día y la posición aproximada de la unidad remota; obtener la información Doppler para una pluralidad de dichos satélites de dicho sistema de posicionamiento por satélite, a partir de dichos datos de almanaque de satélites comprimidos u otra representación de datos de almanaque, utilizando la hora del día y la posición aproximadas; recibir señales GPS a partir de dichos satélites de dicho sistema de posicionamiento por satélite; calcular, en dicha unidad remota, las pseudodistancias para dicha unidad remota, compensando dicha información Doppler el efecto Doppler de dichas señales GPS que se reciben desde dichos satélites de dicho sistema de posicionamiento por satélite para calcular las pseudodistancias en la unidad remota
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07105832.
Solicitante: SNAPTRACK INC..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 5775 Morehouse Drive San Diego, CA 92121 ESTADOS UNIDOS DE AMERICA.
Inventor/es: KRASNER, NORMAN F..
Fecha de Publicación: .
Fecha Solicitud PCT: 7 de Marzo de 1997.
Clasificación Internacional de Patentes:
- G01S19/09 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › proporcionando recursos de procesamiento normalmente llevado a cabo por el receptor.
- G01S19/23C
- G01S19/25A
- G01S19/25B
- G01S19/25C
- G01S19/25D
- G01S19/34 G01S 19/00 […] › Consumo de energía.
- G01S5/00R1B
- G01S5/00R5
- H03J7/04 ELECTRICIDAD. › H03 CIRCUITOS ELECTRONICOS BASICOS. › H03J SINTONIZACION DE CIRCUITOS RESONANTES; SELECCION DE CIRCUITOS RESONANTES (dispositivos indicadores de medida G01D; medidas, ensayos G01R; control a distancia en general G05, G08; control automático o estabilización de generadores H03L). › H03J 7/00 Control automático de frecuencia; Exploración automática de una banda de frecuencias. › en el que el control de frecuencia se realiza haciendo variar las características eléctricas de un elemento ajustable por medios no mecánicos o bien en el que la naturaleza del elemento regulador de frecuencia no es significativo.
- H03J7/04C
- H04B1/00D2
- H04B1/28 H […] › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04B TRANSMISION. › H04B 1/00 Detalles de los sistemas de transmision, no cubiertos por uno de los grupos H04B 3/00 - H04B 13/00; Detalles de los sistemas de transmisión no caracterizados por el medio utilizado para la transmisión. › el receptor comprende al menos un dispositivo de semiconductores que tiene tres electrodos o más.
Clasificación PCT:
- G01S1/04 G01S […] › G01S 1/00 Balizas o sistemas de balizas que transmiten señales que tienen una o más características que pueden ser detectadas por receptores no direccionales y que definen direcciones, posiciones o líneas de posición fijas con relación a los transmisores de las balizas; Receptores asociados a ellas (fijación de la posición mediante la coordinación de una pluralidad de determinaciones de líneas de posición o direcciones G01S 5/00). › Detalles.
- G01S5/00 G01S […] › Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia.
- G01S5/02 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › usando ondas de radio (G01S 19/00 tiene prioridad).
- G01S5/14 G01S 5/00 […] › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
- H04B7/185 H04B […] › H04B 7/00 Sistemas de radiotransmisión, es decir, utilizando un campo de radiación (H04B 10/00, H04B 15/00 tienen prioridad). › Estaciones espaciales o aéreas (H04B 7/204 tiene prioridad).
Países PCT: Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Países Bajos, Suecia, Portugal, Irlanda, Finlandia.
PDF original: ES-2373819_T3.pdf
Fragmento de la descripción:
Receptor GPS perfeccionado que utiliza información de la posición de los satélites para compensar el efecto Doppler.
Antecedentes de la invención i) Campo de la invención La presente invención se refiere a los receptores capaces de determinar la información de la posición de los satélites y, en particular, se refiere a los receptores que encuentran aplicación en los sistemas de posicionamiento global por satélite (GPS) .
ii) Antecedentes de la técnica Los receptores GPS normalmente determinan su posición calculando los tiempos de llegada relativos de las señales transmitidas simultáneamente desde una pluralidad de satélites GPS (o NAVSTAR) . Estos satélites transmiten, como una parte de su mensaje, datos de posicionamiento del satélite y datos sobre la temporización del reloj, es decir, los denominados «datos de efemérides». El procedimiento de búsqueda y adquisición de señales GPS, lectura de los datos de efemérides de una pluralidad de satélites y cálculo de la posición del receptor a partir de estos datos es lento y a menudo se prolonga durante varios minutos. En muchos casos, este tiempo de procesamiento prolongado es inadmisible y, además, limita considerablemente la duración de la batería en las aplicaciones microminiaturizadas portátiles.
Otra de las limitaciones de los receptores GPS actuales es que su funcionamiento se limita a las situaciones en las que existen varios satélites claramente a la vista, sin obstrucciones, y en las que se dispone de una antena de alta calidad correctamente situada para recibir dichas señales. Así pues, estos receptores normalmente no podrán ser utilizados en aplicaciones portátiles montadas sobre el cuerpo del satélite, en áreas donde el nivel de obstrucción por follaje o edificios es significativo, ni en aplicaciones interiores.
Presentan dos funciones principales: (1) el cálculo de las pseudodistancias hasta los diversos satélites GPS y (2) el cálculo de la posición de la plataforma de recepción mediante las pseudodistancias y los datos de temporización y de efemérides de los satélites. Las pseudodistancias son simplemente los retardos de tiempo medidos entre la señal recibida desde cada satélite y el reloj local. Una vez terminada la adquisición y el seguimiento de los datos de efemérides y temporización de los satélites, éstos se extraen de la señal GPS. Como se ha indicado, la recopilación de esta información normalmente se prolonga durante un período de tiempo relativamente largo (de 30 segundos a varios minutos) y debe realizarse con un buen nivel de la señal recibida para obtener tasas de errores bajas.
Prácticamente todos los receptores GPS conocidos utilizan procedimientos de correlación para calcular las pseudodistancias. Los procedimientos de correlación se llevan a cabo en tiempo real y a menudo con correladores de hardware. Las señales GPS contienen señales repetitivas de alta velocidad denominadas «secuencias pseudoaleatorias» (PN) . Los códigos disponibles para las aplicaciones civiles se denominan códigos C/A, y presentan una tasa de inversión de fase binaria (o tasa de «segmentación») de 1, 023 MHz y un período de repetición de 1023 segmentos para un período de código de 1 ms. Las secuencias de código forman parte de la denominada familia de códigos Gold. Cada satélite GPS emite una señal con un código Gold exclusivo.
Una vez que la señal recibida desde un satélite GPS determinado ha sido sometida al procedimiento de subconversión hasta banda base, el receptor de correlación multiplica la señal recibida por una réplica almacenada del código Gold adecuado contenido en la memoria local y, a continuación, integra o hace pasar el producto por un filtro pasabaja para obtener una indicación de la presencia de la señal. Este procedimiento se denomina operación de «correlación». Ajustando en secuencia la temporización relativa de esta réplica almacenada con respecto a la señal recibida, y observando el resultado de la correlación, el receptor puede determinar el retardo de tiempo entre la señal recibida y el reloj local. La determinación inicial de la presencia de dicho resultado se denomina «adquisición». Después de la adquisición, el procedimiento entra en la etapa de «seguimiento», en la que la temporización de la referencia local es ajustada en pequeñas cantidades para proporcionar una salida de alta correlación.
La salida de correlación durante la etapa de seguimiento puede ser considerada como la señal GPS desprovista del código pseudoaleatorio o, empleando la terminología común, «desensanchada». Esta señal es de banda estrecha, siendo su ancho de banda proporcional a una señal de datos binaria de 50 bits por segundo con modulación por desplazamiento de fase que se superpone a la forma de onda GPS.
El procedimiento de adquisición de correlación es muy lento, en particular cuando las señales recibidas son débiles. Para reducir el tiempo de adquisición, muchos receptores GPS utilizan una pluralidad de correladores (habitualmente, hasta 12) , lo cual permite realizar una búsqueda paralela de picos de correlación.
Otra forma de reducir el tiempo de adquisición es la descrita en la patente US nº 4.445.118. En esta propuesta, se utiliza la transmisión de información Doppler desde una estación base de control hasta una unidad receptora GPS remota para facilitar la adquisición de las señales GPS. Aunque esta propuesta permite reducir el tiempo de adquisición, la información Doppler sólo se mantiene precisa durante un corto período de tiempo, puesto que los satélites GPS giran alrededor de la tierra a velocidades relativamente altas.
Por lo tanto, será necesaria otra transmisión de información Doppler para que las unidades remotas puedan disponer de información Doppler precisa.
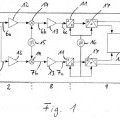
En la patente US nº 4.445.118, denominada patente de Taylor en la presente memoria. En la patente de Taylor, se transmite una referencia de frecuencia estable a una unidad receptora GPS desde una estación base, para eliminar una fuente de errores debida a un oscilador local de poca calidad situado en la unidad receptora GPS remota. Este procedimiento utiliza una señal con modulación por desplazamiento de fase (FSK) especial, cuya frecuencia debe hallarse muy cerca de la frecuencia de la señal GPS. Como se representa en la Figura 4 de la patente de Taylor, la señal FSK especial se halla aproximadamente a 20 MHz por debajo de la señal GPS de 1575 MHz. Por otra parte, en la propuesta descrita en la patente de Taylor, se utiliza un mecanismo de rechazo en modo común mediante el cual cualquier error del oscilador local (representado como L.O. 52) del receptor aparecerá tanto en el canal GPS como en el canal de referencia y, por lo tanto, quedará contrarrestado. No se describe ningún sistema para detectar o medir el error. Este tipo de funcionamiento constituye lo que a veces se denomina «funcionamiento homodino». Aunque esta propuesta aporta algunas ventajas, requiere que los dos canales presenten una estrecha correspondencia, incluida una estrecha correspondencia en frecuencia. Por otra parte, esta propuesta requiere que ambas frecuencias permanezcan fijas y, por consiguiente, las técnicas de salto de frecuencia no son compatibles con este enfoque.
Sumario La presente invención se refiere a un procedimiento para determinar la posición de una unidad remota, que comprende:
recibir, en dicha unidad remota, información de posición de satélites para una pluralidad de satélites de un sistema de posicionamiento por satélite, desde una estación base situada en una posición separada o desde otro satélite que emula una estación base;
determinar la hora del día y la posición aproximada de la unidad remota;
obtener la información Doppler para una pluralidad de dichos satélites de dicho sistema de posicionamiento por satélite, a partir de dicha información de posición de satélites, utilizando la hora del día y la posición aproximada;
recibir señales GPS a partir de dichos satélites de dicho sistema de posicionamiento por satélite;
calcular, en dicha unidad remota, las pseudodistancias para dicha unidad remota, compensando dicha información Doppler el efecto Doppler de dichas señales GPS que se reciben desde dichos satélites de dicho sistema de posicionamiento por satélite para calcular las pseudodistancias en la unidad remota.
Aspectos ventajosos pero no limitativos del procedimiento anterior son los siguientes:
- dicha información de posición... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para determinar la posición de una unidad remota (20) , que comprende:
recibir, en dicha unidad remota (20) , datos de almanaque de satélites comprimidos u otra representación de datos de almanaque para una pluralidad de satélites de un sistema de posicionamiento por satélite, desde una estación base situada en una posición separada o desde otro satélite que emula una estación base;
determinar la hora del día y la posición aproximada de la unidad remota;
obtener la información Doppler para una pluralidad de dichos satélites de dicho sistema de posicionamiento por satélite, a partir de dichos datos de almanaque de satélites comprimidos u otra representación de datos de almanaque, utilizando la hora del día y la posición aproximadas;
recibir señales GPS a partir de dichos satélites de dicho sistema de posicionamiento por satélite;
calcular, en dicha unidad remota, las pseudodistancias para dicha unidad remota, compensando dicha información Doppler el efecto Doppler de dichas señales GPS que se reciben desde dichos satélites de dicho sistema de posicionamiento por satélite para calcular las pseudodistancias en la unidad remota.
2. Procedimiento según la reivindicación 1, caracterizado porque dichos datos de almanaque de satélites comprimidos u otra representación de datos de almanaque se obtienen a partir de unos medios de almacenamiento de referencia situados en dicha estación base.
3. Procedimiento según la reivindicación 1, caracterizado porque comprende además la transmisión de dichas pseudodistancias desde dicha unidad remota hasta dicha estación base; y porque dicha estación base calcula una latitud y una longitud que indican la posición de dicha unidad remota.
4. Procedimiento según la reivindicación 1, caracterizado porque la otra representación de datos de almanaque 30 comprende datos de posición de los satélites ajustados a un conjunto de curvas.
5. Procedimiento según la reivindicación 4, caracterizado porque el conjunto de curvas comprende armónicos esféricos.
6. Unidad remota que utiliza datos que representan señales GPS para proporcionar la posición de dicha unidad remota, comprendiendo dicha unidad remota un primer receptor para recibir dichas señales GPS desde los satélites de un sistema de posicionamiento por satélite y una unidad de procesamiento, caracterizada porque:
la unidad remota incluye además un segundo receptor;
dicho segundo receptor puede utilizarse para acoplarse a través de un enlace de comunicaciones para recibir los datos de almanaque de satélites comprimidos u otra representación de datos de almanaque para una pluralidad de 45 satélites de dicho sistema de posicionamiento por satélite, a la vista de dicha unidad remota, siendo recibida dicha información de posición de satélites desde una estación base situada en una posición separada o desde otro satélite que emula una estación base;
dicha unidad de procesamiento está acoplada a dicho segundo receptor para recibir los datos de almanaque de 50 satélites comprimidos u otra representación de datos de almanaque, para obtener información Doppler para dicha pluralidad de satélites a partir de dichos datos de almanaque de satélites comprimidos u otra representación de datos de almanaque, y para calcular pseudodistancias para dicha unidad remota, compensando dicha información Doppler el efecto Doppler de las señales GPS que se reciben para calcular las pseudodistancias en la unidad remota.
7. Unidad remota según la reivindicación 6, caracterizada porque dicho enlace de comunicación comprende unos medios de comunicación de radiofrecuencia.
8. Unidad remota según la reivindicación 6, caracterizada porque comprende además un transmisor acoplado a 60 dicha unidad de procesamiento, estando destinado dicho transmisor a transmitir dichas pseudodistancias.
9. Unidad remota según la reivindicación 6, caracterizada porque dicha unidad de procesamiento comprende un circuito integrado de procesamiento de señales digitales (DSP) , y porque dicho DSP procesa dichas señales GPS y dicha información Doppler utilizando un algoritmo de convolución rápida.
10. Unidad remota según la reivindicación 9, caracterizada porque comprende además un transmisor acoplado a dicha unidad de procesamiento, estando destinado dicho transmisor a transmitir dichas pseudodistancias.
11. Unidad remota según la reivindicación 6, caracterizada porque la otra representación de los datos de almanaque comprende datos de posición de los satélites ajustados a un conjunto de curvas.
12. Unidad remota según la reivindicación 11, caracterizada porque el conjunto de curvas comprende armónicos esféricos.
Patentes similares o relacionadas:
Arquitectura de receptor de radio versátil, del 20 de Marzo de 2019, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Un receptor de RF que comprende: un circuito de conversión descendente y muestreo adaptado para: - recibir una señal de entrada […]
Receptor de frecuencia intermedia con selección dinámica de la frecuencia intermedia utilizada, del 14 de Septiembre de 2016, de Leonardo S.p.A: Un receptor configurado para recibir una señal de radiofrecuencia y que comprende: * un desmodulador vectorial configurado para […]
Sistema de conversión de una señal para emitir o recibir una señal de radiofrecuencia, del 7 de Septiembre de 2016, de Semtech International AG: Sistema de conversión de una señal SRX de radiofrecuencia recibida para recuperar la información codificada y portada por la señal SRX, que comprende: - medios de […]
 Filtrado de canales de comunicacón dentro de satélites de telecomunicaciones, del 23 de Abril de 2013, de ASTRIUM LIMITED: Filtro de ancho de banda variable, que comprende:
un primer mezclador para trasladar la frecuencia de una señal de entrada mediante un primer valor de frecuencia predeterminado […]
Filtrado de canales de comunicacón dentro de satélites de telecomunicaciones, del 23 de Abril de 2013, de ASTRIUM LIMITED: Filtro de ancho de banda variable, que comprende:
un primer mezclador para trasladar la frecuencia de una señal de entrada mediante un primer valor de frecuencia predeterminado […]
Unidad GPS móvil que presenta un estado de potencia reducida, del 30 de Marzo de 2012, de SNAPTRACK INC.: Unidad GPS móvil que presenta un estado de potencia reducida, comprendiendo la unidad GPS móvil: - un receptor para recibir señales GPS procedentes de satélites […]
 RECEPTOR DE ALTA FRECUENCIA MULTICANAL, del 21 de Junio de 2011, de SELEX SYSTEMS INTEGRTION GMBH: Receptor de alta frecuencia multicanal con un tramo analógico de alta frecuencia , que presenta una entrada para una señal eléctrica de una instalación receptora […]
RECEPTOR DE ALTA FRECUENCIA MULTICANAL, del 21 de Junio de 2011, de SELEX SYSTEMS INTEGRTION GMBH: Receptor de alta frecuencia multicanal con un tramo analógico de alta frecuencia , que presenta una entrada para una señal eléctrica de una instalación receptora […]
 APARATO Y METODO PARA EL FUNCIONAMIENTO EFICIENTE DE TECNOLOGIA DE ACCESO INTER-RADIO (RAT), del 14 de Mayo de 2010, de TELEFONAKTIEBOLAGET LM ERICSSON (PUBL): Un aparato que comprende:
un receptor frontal (2A) ajustable;
un filtro analógico ajustable, AF, (2B) acoplado al receptor frontal;
un convertidor de […]
APARATO Y METODO PARA EL FUNCIONAMIENTO EFICIENTE DE TECNOLOGIA DE ACCESO INTER-RADIO (RAT), del 14 de Mayo de 2010, de TELEFONAKTIEBOLAGET LM ERICSSON (PUBL): Un aparato que comprende:
un receptor frontal (2A) ajustable;
un filtro analógico ajustable, AF, (2B) acoplado al receptor frontal;
un convertidor de […]
 SEÑAL DE FRECUENCIA DE TRANSLACION DE SATELITE Y APILADO, del 3 de Diciembre de 2010, de RF MAGIC, INC: Un dispositivo para procesar señales de satélite que comprende: una primera cadena de amplificadores que reciben una primera señal RF; […]
SEÑAL DE FRECUENCIA DE TRANSLACION DE SATELITE Y APILADO, del 3 de Diciembre de 2010, de RF MAGIC, INC: Un dispositivo para procesar señales de satélite que comprende: una primera cadena de amplificadores que reciben una primera señal RF; […]