PROCEDIMIENTO PARA CORREGIR UNA DETERMINACIÓN DE LA POSICIÓN ANGULAR DE UN EJE DE ACCIONAMIENTO DE UN MOTOR DE CORRIENTE CONTINUA CONMUTADO.
Procedimiento para corregir una determinación de la posición angular de un eje de accionamiento de un motor de corriente continua conmutado mediante el análisis del rizado contenido en la corriente de inducido,
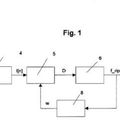
en el caso de que se produzcan rizos fallidos cuando no se detecta ningún rizo dentro de un intervalo de tolerancia alrededor de un instante definido después del último rizo detectado, caracterizado por que la amplitud del intervalo de tolerancia alrededor del instante en el que se espera la detección de un rizo, y en el que no es necesaria la corrección de la cuenta, se adapta dinámicamente a los estados de funcionamiento variables del motor de corriente continua
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2002/005280.
Solicitante: LEOPOLD KOSTAL GMBH & CO. KG.
Nacionalidad solicitante: Alemania.
Dirección: WIESENSTRASSE 47 58507 LÜDENSCHEID ALEMANIA.
Inventor/es: GERLACH, TOBIAS.
Fecha de Publicación: .
Fecha Solicitud PCT: 14 de Mayo de 2002.
Fecha Concesión Europea: 22 de Septiembre de 2010.
Clasificación Internacional de Patentes:
- H02P7/28A
Clasificación PCT:
- H02P7/28 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 7/00 Disposiciones para la regulación o el control de la velocidad o el par de motores eléctricos de corriente continua. › que utilizan dispositivos semiconductores.
Clasificación antigua:
- H02P5/16
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
La invención se refiere a un procedimiento para corregir una determinación de la posición angular de un eje de accionamiento de un motor de corriente continua conmutado, mediante el análisis del rizado contenido en la corriente de inducido, en el caso de que se produzcan rizos fallidos cuando no se detecta ningún rizo dentro de un intervalo de tolerancia alrededor de un instante definido después del último rizo detectado.
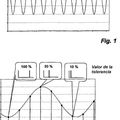
La señal de corriente de inducido de un motor de corriente continua comprende una componente continua y una componente alterna superpuesta con la componente continua. Cuando funciona el motor de corriente continua, la componente alterna se genera por la interacción entre el imán (el campo), el devanado del inducido y el conmutador del motor de corriente continua. Esto se manifiesta por una breve variación de la tensión inducida de lo que resulta la ondulación de la señal de corriente de inducido. Los picos de corriente contenidos en la señal de corriente de inducido – llamados a continuación rizos de corriente – y generados del modo descrito aparecen en una revolución del inducido con una frecuencia que depende del número de delgas del colector. Por ejemplo, si el colector de inducido tiene diez delgas, entonces se encontrarán 10 rizos en la señal de salida del inducido. La cuenta de los rizos puede proporcionar información sobre la posición angular actual del inducido del motor de corriente continua y de este modo sobre la del elemento accionado por el mismo, dentro de su intervalo de movimiento predeterminado. Con este objeto y para poder realizar la cuenta correspondiente, se digitaliza la señal analógica del inducido.
Durante el funcionamiento de un motor de corriente continua, puede ocurrir especialmente bajo carga, que los rizos de corriente contenidos en la señal de corriente de inducido aparezcan distorsionados, manifestándose esta distorsión a través de dos picos de corriente. Estos picos de corriente se conocen como rizos dobles. Como consecuencia de la digitalización de una señal de corriente de inducido de este tipo, debido a esta distorsión, en lugar de registrarse un pico de corriente en esta posición, se detecta una señal de rizos de corriente con dos rizos. La cuenta de este rizo doble conduce a una determinación errónea de la posición del elemento accionado. Lo mismo vale para la ausencia de un rizo de corriente cuando el eje está efectivamente girando que en este caso se denomina rizo fallido. Estos errores están condicionados por el conmutador y no se pueden eliminar sin no es mediante un procesado de la señal de corriente de inducido.
Se ha conocido por el documento DE 197 29 238 C1 una medida correctiva, según la cual la ausencia de un rizo esperado se corrige en la cuenta únicamente cuando el rizo esperado no se detecta dentro de un intervalo de tolerancia alrededor del instante esperado. El intervalo de tolerancia está fijado previamente. En el procedimiento conocido por este documento, el instante calculado para el siguiente punto de conmutación más probable se amplía en la magnitud del intervalo de tolerancia. De este modo los rizos de corriente que no aparecen en o antes del instante calculado se reconocen como rizos fallidos, únicamente cuando además no se detecta un rizo de corriente dentro del intervalo de tolerancia. Con este procedimiento es posible una detección de rizos satisfactoria en el caso de un funcionamiento estacionario o casi estacionario del motor de corriente continua, en el que los rizos fallidos o dobles se corrigen correspondientemente. Si se detecta un rizo de corriente después del límite superior del intervalo de tolerancia, el sistema concluye que no ha aparecido el rizo de corriente por fallo y el resultado de la cuenta se corrige correspondientemente. Sin embargo, durante el funcionamiento de un motor eléctrico de corriente continua pueden aparecer modos de funcionamiento en los cuales la duración del periodo de rizado de corriente aumenta de forma más bien brusca. Un modo de funcionamiento de este tipo aparece por ejemplo cuando el aumento del momento de carga tiene forma de salto, por ejemplo porque el motor eléctrico trabaja contra un tope. Puesto que en una situación de este tipo el rizo de corriente se detecta después de concluido el intervalo de tolerancia, el sistema realiza una falsa corrección de la cuenta. En consecuencia la determinación de la posición del inducido es falsa. Si se repiten sucesos de este tipo el resultado final se falsea de forma creciente.
Se conoce por el documento DE 198 34 108 A1 un procedimiento para la determinación del número de vueltas en motores eléctricos a partir de los rizos de corriente. En este procedimiento se determina un intervalo de tiempo dentro del cual se ha de detectar el rizo siguiente. El tamaño de este intervalo de tiempo a explorar se determina en función de rizo detectado anteriormente, por ejemplo usando la distancia entre los dos últimos rizos detectados para el cálculo. En el caso de que falte un rizo ya no es posible el cálculo del siguiente intervalo pues falta la distancia temporal, es decir a medida que aumenta el número de rizos fallidos aumenta la imprecisión, pues se ha de recurrir a la distancia temporal entre rizos muy anteriores.
Partiendo del estado de la técnica comentado, el objeto de la invención
consiste en desarrollar el procedimiento anterior explicado al inicio de tal modo
que se evite la interpretación errónea de los rizos fallidos, del estado de la técnica anterior, o por lo menos que la reduzca ampliamente.
Según la invención, este objeto se consigue de manera que la amplitud del intervalo de tolerancia alrededor del instante en el que se espera la detección de un rizo, y en el que no es necesaria la corrección de la cuenta, se adapta dinámicamente a los estados de funcionamiento variables del motor de corriente continua.
Al contrario que en la técnica anterior, en el procedimiento según la invención no se predetermina un intervalo de tolerancia estático, sino que por el contrario éste se adapta a los estados de funcionamiento del motor de corriente continua y se ajusta a los estados de funcionamiento variables. Si por ejemplo un motor de corriente continua trabaja contra un tope después de un funcionamiento estable, al cual se ha adaptado el intervalo de tolerancia y durante el cual éste no ha variado o ha variado muy poco, y el momento de carga aumenta en forma de escalón entonces tiene lugar una adaptación al estado de funcionamiento variable de manera que en el ejemplo descrito, el intervalo de tolerancia se ajusta a este estado de funcionamiento, ampliándose. Mediante la ampliación del intervalo de tolerancia es posible detectar períodos de rizado que se alargan debido al cambio del estado de funcionamiento en el ejemplo descrito, dentro del intervalo de tolerancia ajustado. En consecuencia la cuenta se corresponde con el número de rizos efectivamente detectados, de modo que en el caso de un estado de funcionamiento variable como el descrito, la determinación de posición del eje del inducido continua siendo exacta.
El intervalo de tolerancia dentro del cual se espera la detección de un rizo puede ampliarse o reducirse en dependencia de los estados de funcionamiento variables del motor de corriente continua.
Según una configuración de la invención, se prevé que el intervalo de tolerancia se ajuste en dependencia de la magnitud del cambio del valor medio de la señal de corriente de inducido digitalizada. Así se prevé que cuando el valor medio aumente entonces se amplíe el intervalo de tolerancia y que cuando el valor medio disminuya entonces se reduzca. En la adaptación del intervalo de tolerancia según este ejemplo de realización, aquél se ajusta en dependencia del estado de funcionamiento anterior al instante actual. Así se puede prever que las variaciones de valor medio se subdividan en intervalos de variación de modo que una adaptación del tamaño del intervalo de tolerancia tenga lugar paso a paso. Para la determinación del valor medio es suficiente cuando se toma en cuenta un intervalo de tiempo determinado hacia atrás a partir del instante actual. La amplitud del intervalo de tiempo puede determinarse constante, o bien, con el fin de minimizar la cantidad de cálculo, puede ser adaptable al estado de funcionamiento del motor de corriente continua.
Según otra configuración de la invención, la adaptación del intervalo de tolerancia puede realizarse en dependencia de la magnitud de una variación de la velocidad de giro del motor calculada a partir de datos característicos...
Reivindicaciones:
1. Procedimiento para corregir una determinación de la posición angular de un eje de accionamiento de un motor de corriente continua conmutado mediante el análisis del rizado contenido en la corriente de inducido, en el caso de que se produzcan rizos fallidos cuando no se detecta ningún rizo dentro de un intervalo de tolerancia alrededor de un instante definido después del último rizo detectado, caracterizado por que la amplitud del intervalo de tolerancia alrededor del instante en el que se espera la detección de un rizo, y en el que no es necesaria la corrección de la cuenta, se adapta dinámicamente a los estados de funcionamiento variables del motor de corriente continua.
2. Procedimiento según la reivindicación 1, caracterizado por que el intervalo de tolerancia se ajusta en dependencia de la magnitud de un cambio del valor medio de la señal de corriente de inducido, ampliándose el intervalo de tolerancia cuando el valor medio aumenta, y reduciéndose cuando el valor medio disminuye
3. Procedimiento según la reivindicación 2, caracterizado por que se toma en cuenta un intervalo de tiempo de amplitud constante y anterior al instante actual para la determinación del valor medio de la señal de corriente de inducido.
4. Procedimiento según la reivindicación 2, caracterizado por que se toma en cuenta un intervalo de tiempo de amplitud adaptable y anterior al instante actual para la determinación del valor medio de la señal de corriente de inducido, en función del estado de funcionamiento del motor de corriente continua.
5. Procedimiento según una de las reivindicaciones de la 2 a la 4, caracterizado por que la adaptación de la amplitud del intervalo de tolerancia tiene lugar paso a paso.
6. Procedimiento según una de las reivindicaciones de la 2 a la 5, caracterizado por que se calcula el valor medio a partir de la señal de corriente de inducido digitalizada.
7. Procedimiento según la reivindicación 1, caracterizado por que el intervalo de tolerancia es función de la magnitud de una variación de la velocidad de gi
ro del motor calculada a partir de datos de la corriente y de las características del motor, ampliándose el intervalo de tolerancia en el caso de una variación de la velocidad de giro negativa y/o reduciéndose en el caso de una variación de la velocidad de giro positiva.
8. Procedimiento según la reivindicación 7, caracterizado por que para la determinación del intervalo de tolerancia máximo en un instante, se realiza una determinación de una variación negativa de la velocidad de rotación mediante el cálculo del recorrido de la respuesta a un escalón en la velocidad de giro, basada en un aumento brusco del momento de carga hasta el momento de carga máximo de cortocircuito.
9. Procedimiento según la reivindicación 7, caracterizado por que el cálculo de la variación negativa de la velocidad de giro tiene lugar en cada ciclo del muestreo con el que se digitaliza la señal de corriente del inducido.
10. Procedimiento según la reivindicación 7, caracterizado por que el cálculo de la variación negativa de la velocidad de giro se realiza una vez en el curso de un periodo de rizado de corriente y en los otros instantes de muestreo se extrapola dentro de un periodo de rizado de corriente.
11. Procedimiento según una de las reivindicaciones de la 7 a la 9, caracterizado por que después de una fase de arranque del motor de corriente continua, en el curso de la cual se realiza el cálculo con los necesarios datos característicos de corriente y de motor, sigue una fase de funcionamiento en el curso de la cual se realiza una observación de la diferencia entre los datos de corriente de motor actuales y los precedentes para el cálculo de la máxima variación de velocidad de giro.
12. Procedimiento según una de las reivindicaciones de la 6 a la 10, caracterizado por que este procedimiento para la corrección de la cuenta de los rizos de corriente se realiza únicamente en un intervalo de tiempo durante una parada del motor o un arranque del motor.
Patentes similares o relacionadas:
 PROCEDIMIENTO PARA DETERMINAR LA POSICIÓN ANGULAR DE UN EJE DE ACCIONAMIENTO DE UN MOTOR DE CORRIENTE CONMUTADO, del 29 de Marzo de 2011, de LEOPOLD KOSTAL GMBH & CO. KG: Procedimiento para determinar la posición angular de un eje de accionamiento de un motor de corriente continua conmutado mediante el análisis del rizado […]
PROCEDIMIENTO PARA DETERMINAR LA POSICIÓN ANGULAR DE UN EJE DE ACCIONAMIENTO DE UN MOTOR DE CORRIENTE CONMUTADO, del 29 de Marzo de 2011, de LEOPOLD KOSTAL GMBH & CO. KG: Procedimiento para determinar la posición angular de un eje de accionamiento de un motor de corriente continua conmutado mediante el análisis del rizado […]
 METODO PARA DETERMINAR LA VELOCIDAD ANGULAR EN UN MOTOR CONMUTDO MECANICAMENTE MIDIENDO UNICAMENTE LA CORRIENTE QUE CIRCULA POR EL MISMO, del 7 de Febrero de 2011, de UNIVERSIDAD DE VALLADOLID: Método para la determinar la velocidad angular en un motor conmutado mecánicamente midiendo únicamente la corriente que circula por el mismo. El […]
METODO PARA DETERMINAR LA VELOCIDAD ANGULAR EN UN MOTOR CONMUTDO MECANICAMENTE MIDIENDO UNICAMENTE LA CORRIENTE QUE CIRCULA POR EL MISMO, del 7 de Febrero de 2011, de UNIVERSIDAD DE VALLADOLID: Método para la determinar la velocidad angular en un motor conmutado mecánicamente midiendo únicamente la corriente que circula por el mismo. El […]
 PROCEDIMIENTO PARA DETERMINAR LA POSICION ANGULAR DEL ARBOL DE ARRASTRE DE UN MOTOR DE CORRIENTE CONTINUA, del 25 de Noviembre de 2009, de LEOPOLD KOSTAL GMBH & CO. KG: Procedimiento para determinar la posición de un elemento, accionado por el árbol de accionamiento de un motor de corriente continua, dentro de un recorrido predefinido […]
PROCEDIMIENTO PARA DETERMINAR LA POSICION ANGULAR DEL ARBOL DE ARRASTRE DE UN MOTOR DE CORRIENTE CONTINUA, del 25 de Noviembre de 2009, de LEOPOLD KOSTAL GMBH & CO. KG: Procedimiento para determinar la posición de un elemento, accionado por el árbol de accionamiento de un motor de corriente continua, dentro de un recorrido predefinido […]
Vehículo ferroviario con operación por batería, del 21 de Febrero de 2018, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para operar un vehículo ferroviario apropiado para operar por batería, que comprende un circuito intermedio y una batería, donde […]
 Dispositivo de ajuste de pala de rotor para una instalación de energía eólica, del 27 de Agosto de 2014, de Repower Systems AG.: Instalación de energía eólica que comprende un rotor con palas de rotor ajustables para accionar un generador , con un dispositivo de ajuste para […]
Dispositivo de ajuste de pala de rotor para una instalación de energía eólica, del 27 de Agosto de 2014, de Repower Systems AG.: Instalación de energía eólica que comprende un rotor con palas de rotor ajustables para accionar un generador , con un dispositivo de ajuste para […]
 Sistema y método de limitación de la corriente de inducido en caso de defecto en máquinas síncronas, del 4 de Julio de 2013, de UNIVERSIDAD POLITECNICA DE MADRID: Sistema y método de limitación de la corriente de inducido en caso de defecto en máquinas síncronas excitadas mediante un regulador de tensión . El método comprende:
- […]
Sistema y método de limitación de la corriente de inducido en caso de defecto en máquinas síncronas, del 4 de Julio de 2013, de UNIVERSIDAD POLITECNICA DE MADRID: Sistema y método de limitación de la corriente de inducido en caso de defecto en máquinas síncronas excitadas mediante un regulador de tensión . El método comprende:
- […]
 Circuito para controlar la velocidad de un motor tubular de corriente continua con escobillas, del 28 de Agosto de 2012, de HANGZHOU SHTECH CO., LTD. (100.0%): 1. Circuito para controlar la velocidad de un motor tubular de corriente continua con escobillas, caracterizado porque comprende un bucle de control cuyo extremo de salida […]
Circuito para controlar la velocidad de un motor tubular de corriente continua con escobillas, del 28 de Agosto de 2012, de HANGZHOU SHTECH CO., LTD. (100.0%): 1. Circuito para controlar la velocidad de un motor tubular de corriente continua con escobillas, caracterizado porque comprende un bucle de control cuyo extremo de salida […]
 Determinación del ángulo de rotación de un motor eléctrico, del 20 de Abril de 2012, de ROBERT BOSCH GMBH: Procedimiento para determinar un ángulo de rotación (Φb) de un motor eléctrico, en donde la determinación de un ángulo de rotación inversa (Φrueck) […]
Determinación del ángulo de rotación de un motor eléctrico, del 20 de Abril de 2012, de ROBERT BOSCH GMBH: Procedimiento para determinar un ángulo de rotación (Φb) de un motor eléctrico, en donde la determinación de un ángulo de rotación inversa (Φrueck) […]