CONTROL DE TRACCIÓN Y DESVIACIÓN LATERAL CON ESTABILIDAD MEJORADA, UTILIZANDO UN DIFERENCIAL CONTROLADO ELETRÓNICAMENTE CON DESLIZAMIENTO LIMITADO.
Sistema de control (50) para un vehículo que tiene primeras y segundas ruedas (28,
30) que comprende: un diferencial (22) adaptado para distribuir par entre las primeras y segundas ruedas (28, 30) de un eje; un controlador de tracción con estabilidad mejorada (52) para controlar el funcionamiento del diferencial (22) desde el arranque del vehículo hasta una velocidad del vehículo predeterminada, estando configurado el controlador de tracción (52) para acoplar el diferencial (22) en un primer estado de accionamiento del vehículo de acuerdo con, como mínimo, un parámetro operativo del vehículo indicativo de un estado de accionamiento de baja tracción, y para acoplamiento de control adicional del diferencial (22) en un segundo estado de accionamiento del vehículo durante las condiciones operativas de baja tracción, de acuerdo con la diferencia entre la tasa de desviación lateral real del vehículo y una tasa de desviación lateral predeterminada objetivo del vehículo; y un controlador (54) de estabilidad para controlar el acoplamiento del diferencial (22) a la velocidad predeterminada del vehículo o por encima de ésta; de manera que el controlador de tracción (52) está configurado para el acoplamiento del diferencial (22) de acuerdo con una señal de par aplicado al diferencial deseado que se basa en una señal de par aplicado al diferencial original modificado; de manera que la señal de par aplicado al diferencial deseado, es igual a la señal de par aplicada al diferencial original multiplicada por un modificador, incluyendo el modificador en su numerador la diferencia entre un valor de rango de error y la multiplicación de una función de saturación, una banda muerta ("deadband") y la diferencia entre la tasa de desviación lateral real del vehículo y la tasa de desviación lateral predeterminada objetivo del vehículo, e incluyendo el modificador en su denominador, el valor del rango de error
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2007/000242.
Solicitante: EATON CORPORATION.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: EATON CENTER, 1111 SUPERIOR AVENUE CLEVELAND, OHIO 44114-2584 ESTADOS UNIDOS DE AMERICA.
Inventor/es: PIYABONGKARN,Damrongrit, LEW,Jae,Y, GROGG,John,A, KYLE,Robert,J.
Fecha de Publicación: .
Fecha Solicitud PCT: 2 de Febrero de 2007.
Clasificación Internacional de Patentes:
- B60K23/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60K DISPOSICIONES O MONTAJE DE CONJUNTOS DE PROPULSION O DE TRANSMISIONES SOBRE VEHICULOS; DISPOSICIONES O MONTAJE DE VARIOS MOTORES PRINCIPALES DIFERENTES EN VEHÍCULOS; ACCIONAMIENTOS AUXILIARES PARA VEHICULOS; INSTRUMENTACION O TABLEROS DE A BORDO DE VEHICULOS; DISPOSICIONES DE CONJUNTOS DE PROPULSION SOBRE VEHICULOS, RELATIVAS A LA REFRIGERACION, A LA ADMISION DE AIRE, AL ESCAPE DE GASES O A LA ALIMENTACION DE CARBURANTE. › B60K 23/00 Disposición o montaje de los dispositivos de control de transmisiones de vehículos o partes de ellas, no previstos en otro lugar (transmisiones y mecanismos de dirección combinados para dirigir las ruedas no orientables B62D 11/00; cabinas que pueden ser desplazadas y que comportan adaptaciones particulares de los dispositivos de control del vehículo B62D 33/073; tales dispositivos de control en sí F16D, F16H). › para mecanismos diferenciales.
Clasificación PCT:
- B60K23/04 B60K 23/00 […] › para mecanismos diferenciales.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2362238_T3.pdf



Fragmento de la descripción:
ANTECEDENTES DE LA INVENCIÓN
La presente invención se refiere a un sistema y procedimiento para el control activo de la estabilidad de un vehículo utilizando diferenciales electrónicamente controlados, con deslizamiento limitado, para favorecer la dinámica lateral del vehículo conservando el movimiento longitudinal.
Los sistemas de frenado antibloqueo (ABS) han pasado a ser una parte integral de los modernos vehículos para pasajeros y pueden ser utilizados para mejorar la tracción y la estabilidad del vehículo. Los sistemas típicos de control y tracción basados en la intervención de los frenos tienen la desventaja de disipar una cantidad de energía aproximadamente igual a la consumida en la acción sobre la rueda con mayor rozamiento. Por ejemplo, cuando un vehículo intenta acelerar o subir sobre una superficie con rozamiento bajo-alto, es decir, de rozamiento partido (splitµ), frecuentemente pierde energía en el sistema de frenado al disipar la misma cantidad de energía que aplica a la rueda con alto rozamiento. Por lo tanto, el par de frenado limita el par de impulsión en la rueda con rozamiento elevado y frecuentemente es insuficiente para desplazar el vehículo, por ejemplo, en una situación de ascenso de una pendiente.
Para superar esta limitación, se pueden aplicar a las ruedas motrices control de tracción con utilización de diferenciales de deslizamiento limitado controlados electrónicamente (ELSD) a las ruedas motrices, de manera que el vehículo puede mantener el movimiento longitudinal enviando un par de tracción más elevado a la rueda con mayor rozamiento. Los diferenciales completamente bloqueados consiguen la mejor tracción longitudinal posible pero, sobre superficies deslizantes o de rozamiento partido (split-µ), la dinámica lateral del vehículo se puede degradar y desviar de la dirección deseada por el conductor. Realmente, el par de tracción forzado debe ser controlado de manera adecuada para impedir movimientos de desviación lateral no deseados y la eventual degradación de la dinámica lateral del vehículo.
A velocidades relativamente elevadas, se pueden aplicar sistemas de control de estabilidad de la desviación lateral para impedir que el vehículo pierda el control. La mayor parte de sistemas de control de estabilidad para vehículos conocidos en el mercado se basan en el frenado. Los sistemas de control de estabilidad basados en el frenado utilizan equipos ABS para aplicar fuerzas de frenado individuales sobre las ruedas a efectos de corregir la dinámica de la desviación lateral del vehículo. No obstante, los sistemas basados en el frenado adolecen de la limitación de que el rendimiento del vehículo en cuanto a velocidad se deteriora y entra en conflicto con las acciones del conductor. Para superar la limitación del control de estabilidad basado en el frenado, puede ser más ventajosa la utilización de un control de estabilidad por distribución de par activo en condiciones de aceleración próximas al límite de estabilidad del vehículo.
En las dos últimas décadas se ha observado un crecimiento significativo en la aplicación de sistemas de tracción a las cuatro ruedas (4WD) en vehículos para pasajeros. La tecnología de diferencial de deslizamiento limitado (LSD) se está utilizando ya en muchos modelos de producción. Los ELSD se utilizan ampliamente y se encuentran a disposición en el mercado del automóvil, y se conoce que tienen capacidad de añadir amortiguación en sentido lateral al vehículo además de su mayor rendimiento en cuanto a tracción.
En el documento EP-A-1 616 743 se ha dado a conocer un sistema de control para un vehículo que tiene unas primeras y unas segundas ruedas, comprendiendo un diferencial adaptado para distribuir par entre las primeras y segundas ruedas y un controlador de tracción de estabilidad mejorada para controlar el funcionamiento del diferencial en un primer estado de accionamiento del vehículo, de acuerdo, como mínimo, con un parámetro operativo del vehículo indicativo de las condiciones de funcionamiento con baja tracción y para controlar adicionalmente la actuación del diferencial en un segundo estado de accionamiento del vehículo durante el estado de accionamiento con baja tracción, de acuerdo con la diferencia entre la tasa de desviación lateral real del vehículo y una tasa de desviación lateral del vehículo como objetivo predeterminado.
En el documento EP-B-1 334 000 se ha dado a conocer un sistema de control para un vehículo en el que se detecta el deslizamiento en la tracción de las ruedas motrices y se compara, como mínimo, a un valor de deslizamiento umbral. La potencia de propulsión se reduce si el deslizamiento motriz supera el valor de deslizamiento umbral. Se forma una integral de deslizamiento entre las ruedas motrices y no motrices y se determina el, como mínimo, un valor de deslizamiento umbral de manera continua de acuerdo con la integral de deslizamiento.
BREVE RESUMEN DE LA INVENCIÓN
La presente invención consiste en un sistema de control para vehículos que tienen unas primeras y unas segundas ruedas, tal como se define en la reivindicación 1.
Se da a conocer un sistema de control para un vehículo que tiene primeras y segundas ruedas, que comprende un diferencial adaptado para distribuir par entre las primeras y segundas ruedas, y un controlador de tracción para controlar el funcionamiento del diferencial desde el arranque del vehículo hasta una velocidad predeterminada del mismo. El controlador de tracción está configurado para poner al diferencial en un primer estado de accionamiento del vehículo, de acuerdo, como mínimo, a un parámetro operativo del vehículo que indica un estado de accionamiento de baja tracción, y para controlar que el accionamiento del diferencial en un segundo estado de accionamiento del vehículo durante el estado de accionamiento de baja tracción, de acuerdo con la diferencia entre la tasa de desviación lateral real del vehículo y una tasa de desviación real del vehículo en forma de objetivo predeterminado. El sistema de control comprende también un controlador de estabilidad para controlar el accionamiento del diferencial en el límite de velocidad predeterminado o por encima del mismo.
Una realización de la presente invención comprende un método para el control activo de la estabilidad utilizando los ELSD para mejorar la dinámica lateral del vehículo conservando el movimiento longitudinal. Otra realización de la presente invención comprende un sistema de control que proporciona un aumento de la estabilidad del control de tracción. El control de tracción con estabilidad mejorada ha sido evaluado en las condiciones de arranque con gas a fondo en línea recta sobre una superficie de hielo/asfalto de rozamiento partido (split-µ). Los datos experimentales muestran una mejora significativa de la estabilidad en la modalidad operativa de control de la tracción.
BREVE DESCRIPCIÓN DE LOS DIBUJOS
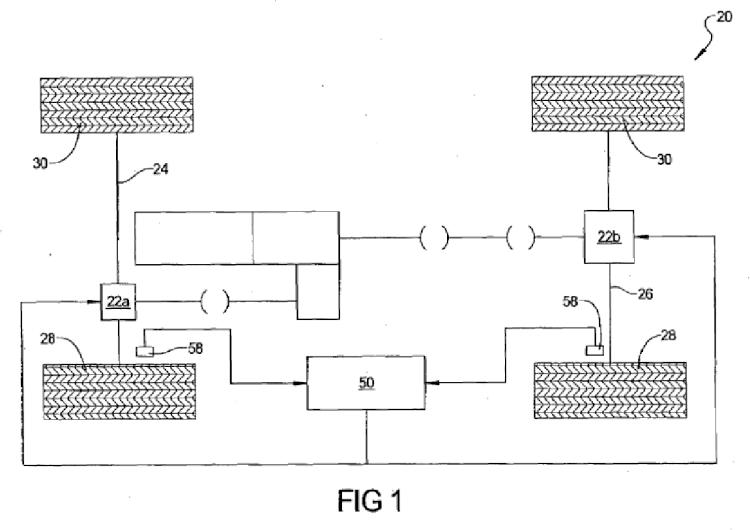
La figura 1 es una configuración a título de ejemplo de la línea de transmisión de un vehículo que comprende diferenciales de deslizamiento limitado controlados electrónicamente;
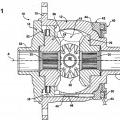
La figura 2 es una vista en sección de un diferencial de deslizamiento limitado controlado electrónicamente, a título de ejemplo;
La figura 3 es un gráfico del tiempo de respuesta del embrague para el diferencial de deslizamiento limitado controlado electrónicamente, a título de ejemplo, de la figura 2;
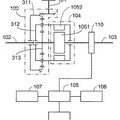
La figura 4 es un modelo dinámico de un eje de un vehículo que comprende un diferencial de deslizamiento limitado controlado electrónicamente;
La figura 5 es un modelo dinámico de un embrague diferencial con deslizamiento limitado controlado electrónicamente;
La figura 6 es un diagrama esquemático de un sistema de control según una realización de la presente invención;
La figura 7 es un gráfico que muestra el efecto de bloqueo de un diferencial de deslizamiento limitado controlado electrónicamente en las ruedas posteriores de un eje de un vehículo;
La figura 8 es un gráfico de la tasa de desviación lateral de un vehículo para una maniobra de cambio en una doble vía de circulación en un vehículo que comprende un sistema de control, de acuerdo con una realización de la presente invención;
La figura 9 es un gráfico de par en el embrague para un diferencial de deslizamiento limitado controlado electrónicamente, que corresponde al gráfico de la figura 8;
La figura 10 es una vista... [Seguir leyendo]
Reivindicaciones:
1. Sistema de control (50) para un vehículo que tiene primeras y segundas ruedas (28, 30) que comprende:
un diferencial (22) adaptado para distribuir par entre las primeras y segundas ruedas (28, 30) de un eje;
un controlador de tracción con estabilidad mejorada (52) para controlar el funcionamiento del diferencial (22) desde el arranque del vehículo hasta una velocidad del vehículo predeterminada, estando configurado el controlador de tracción (52) para acoplar el diferencial (22) en un primer estado de accionamiento del vehículo de acuerdo con, como mínimo, un parámetro operativo del vehículo indicativo de un estado de accionamiento de baja tracción, y para acoplamiento de control adicional del diferencial (22) en un segundo estado de accionamiento del vehículo durante las condiciones operativas de baja tracción, de acuerdo con la diferencia entre la tasa de desviación lateral real del vehículo y una tasa de desviación lateral predeterminada objetivo del vehículo; y
un controlador (54) de estabilidad para controlar el acoplamiento del diferencial (22) a la velocidad predeterminada del vehículo o por encima de ésta;
de manera que el controlador de tracción (52) está configurado para el acoplamiento del diferencial (22) de acuerdo con una señal de par aplicado al diferencial deseado que se basa en una señal de par aplicado al diferencial original modificado;
de manera que la señal de par aplicado al diferencial deseado, es igual a la señal de par aplicada al diferencial original multiplicada por un modificador, incluyendo el modificador en su numerador la diferencia entre un valor de rango de error y la multiplicación de una función de saturación, una banda muerta (“deadband”) y la diferencia entre la tasa de desviación lateral real del vehículo y la tasa de desviación lateral predeterminada objetivo del vehículo, e incluyendo el modificador en su denominador, el valor del rango de error.
2. Sistema de control, según la reivindicación 1, en el que el controlador de tracción (52) está configurado para modular el acoplamiento del diferencial (22) durante el estado de accionamiento con baja tracción de acuerdo con la diferencia entre la tasa de desviación lateral real vehículo y la tasa de desviación lateral predeterminada del vehículo.
3. Sistema de control, según la reivindicación 1, en el que en el primer estado de accionamiento del vehículo, la tasa de desviación lateral real del vehículo es menor, o sustancialmente igual, que la tasa de desviación lateral objetivo predeterminada del vehículo, y en el segundo estado de accionamiento del vehículo la tasa de desviación lateral real del vehículo es superior que la tasa de desviación lateral predeterminada objetivo del vehículo.
Patentes similares o relacionadas:
Accionamiento eléctrico, del 29 de Enero de 2020, de GKN AUTOMOTIVE LTD: Accionamiento eléctrico para accionar un eje de accionamiento de un vehículo automóvil, que comprende: una disposición de carcasa ; […]
Un sistema de control para controlar una disposición motriz para accionar de manera diferencial las ruedas izquierda y derecha de un vehículo motorizado, del 6 de Marzo de 2019, de Penny & Giles Controls Limited: Un sistema que comprende: una disposición motriz que comprende dos motores eléctricos accionados independientemente para accionar […]
Sistema de tracción de modo múltiple, del 7 de Marzo de 2018, de POLARIS INDUSTRIES INC: Un vehículo de motor que tiene un sistema de tracción de modo múltiple, el vehículo comprende: una ignición; un chasis; elementos […]
Disposición de transmisión, del 15 de Julio de 2015, de Müller, Werner: Disposición de transmisión que está montada en la línea de accionamiento de un vehículo terrestre de uno o varios ejes, en particular un vehículo industrial, […]
Sistema de tracción de modo múltiple, del 11 de Febrero de 2015, de POLARIS INDUSTRIES INC: Un vehículo de motor que tiene un sistema de tracción de modo múltiple, comprendiendo el vehículo un par de ruedas traseras y un par de ruedas delanteras […]
 Diferencial de bloqueo controlado electrónicamente provisto de un mazo de conductores de cables de control lógico, del 13 de Agosto de 2014, de EATON CORPORATION: Un sistema de control el cual controla lógicamente el funcionamiento de un diferencial de bloqueo controlado electrónicamente, dicho sistema de control comprendiendo:
un […]
Diferencial de bloqueo controlado electrónicamente provisto de un mazo de conductores de cables de control lógico, del 13 de Agosto de 2014, de EATON CORPORATION: Un sistema de control el cual controla lógicamente el funcionamiento de un diferencial de bloqueo controlado electrónicamente, dicho sistema de control comprendiendo:
un […]
Vehículo automóvil con bloqueo de diferencial, del 26 de Marzo de 2014, de SCANIA CV AB: Procedimiento para el montaje de unos medios de accionamiento para actuar sobre un bloqueo de diferencial de un vehículo automóvil , que comprende […]
 Transmisión diferencial de tres árboles de extremidad controlada por amortiguación eléctrica, del 29 de Mayo de 2012, de YANG, TAI-HER: Una transmisión diferencial de tres árboles de extremidad controlada por amortiguación eléctrica que incluye una instalación electromecánica giratoria por […]
Transmisión diferencial de tres árboles de extremidad controlada por amortiguación eléctrica, del 29 de Mayo de 2012, de YANG, TAI-HER: Una transmisión diferencial de tres árboles de extremidad controlada por amortiguación eléctrica que incluye una instalación electromecánica giratoria por […]