PROCEDIMIENTO Y APARATO PARA ADQUIRIR SEÑALES DEL SISTEMA DE POSICIONAMIENTO DE SATÉLITES.
Un procedimiento para adquirir inicialmente señales del sistema de posicionamiento de satélites,
SPS, procedimiento implementado en un receptor (16, 17, 22, 75, 101) del SPS y que comprende: determinar (161) un primer tiempo de llegada (133, 138) de una secuencia seudoaleatoria, PN, época de una señal de un primer satélite del SPS con respecto a una época (131, 132) de PN de referencia que está generada localmente en el receptor del SPS; determinar (163) una ubicación estimada de dicho receptor (16, 17, 22, 75, 101) del SPS; determinar un tiempo del día; determinar una posición de dicho primer satélite del SPS y una posición de un segundo satélite del SPS, usando dicho tiempo del día e información de posición satelital; caracterizado por usar dicha ubicación estimada de dicho receptor del SPS y las posiciones determinadas de dichos satélites del SPS primero y segundo para determinar una distancia estimada R1 desde dicha ubicación estimada de dicho receptor del SPS a dicho primer satélite del SPS, y una distancia estimada R2 desde dicha ubicación estimada de dicho receptor del SPS a dicho segundo satélite del SPS; determinar (165) un tiempo de llegada (134) estimado de una época de PN de la señal del segundo satélite del SPS, con respecto a dicha época (131, 132) de PN de referencia, determinando un desplazamiento temporal (δTnom, 137) con respecto a dicha primera hora de llegada (133, 138), calculándose dicho desplazamiento temporal (δTnom, 137) con la expresión (R2 - R1) / c, donde c es la velocidad de la luz; buscar (169) el tiempo de llegada de señales del SPS desde dicho segundo satélite del SPS en una gama de búsqueda (E, 135) alrededor de dicha hora de llegada (134) estimada de una época de PN del segundo satélite del SPS
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US1999/016111.
Solicitante: SNAPTRACK INC..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: Suite 250, 4040 Moorpark Avenue San Jose, CA 95117 ESTADOS UNIDOS DE AMERICA.
Inventor/es: KRASNER, NORMAN F..
Fecha de Publicación: .
Fecha Solicitud PCT: 15 de Julio de 1999.
Clasificación Internacional de Patentes:
- G01S19/23C
Clasificación PCT:
- G01S5/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia.
- G01S5/14 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
Clasificación antigua:
- G01S5/00 G01S […] › Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia.
- G01S5/14 G01S 5/00 […] › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Finlandia, Chipre.
PDF original: ES-2359615_T3.pdf



Fragmento de la descripción:
Campo de la invención
La presente invención se refiere a receptores capaces de adquirir señales de satélites usados en sistemas de posicionamiento de satélites (SPS), tales como el sistema de posicionamiento global (GPS).
Antecedentes de la invención
Los receptores del GPS determinan normalmente su posición calculando los tiempos relativos de llegada de señales transmitidas simultáneamente desde una multiplicidad de satélites del GPS (o de NAVSTAR). Estos satélites transmiten como parte de su mensaje tantos datos de posicionamiento de satélite, las llamadas “efemérides”, como asimismo datos de temporización de reloj. El proceso de buscar y adquirir señales del GPS, leer los datos satelitales para una multiplicidad de satélites y calcular la ubicación del receptor a partir de estos datos consume tiempo, requiriendo a menudo varios minutos. En muchos casos, este prolongado tiempo de procesamiento es inaceptable y, además, limita en gran medida la vida de las baterías en aplicaciones portátiles micro-miniaturizadas. Además, bajo severas condiciones de bloqueo, donde se requiere una sensibilidad receptora aumentada, este tiempo de procesamiento puede aumentar significativamente.
Hay dos funciones principales de los sistemas receptores del GPS: (1) cálculo de las seudodistancias a los diversos satélites del GPS y (2) cálculo de la posición de la plataforma receptora usando estas seudodistancias y datos de temporización y efemérides de satélites. Las seudodistancias son simplemente los retardos temporales medidos entre la señal recibida desde cada satélite y un reloj local. Alternativamente, el retardo temporal puede medirse entre la señal transmitida desde cada satélite y un reloj local. Aquí, la historia de posicionamiento de cada satélite se usa para incluir el retardo de trayecto desde el satélite al sensor. Si el retardo temporal se multiplica luego por la velocidad de la luz obtenemos la seudodistancia expresada como una distancia. Se convierte en una verdadera distancia cuando se determina el tiempo del reloj local (o sesgo de reloj) y otros pequeños errores de temporización. Para los fines de la presente invención, que atañe a la búsqueda y adquisición de señales, usamos la definición precedente de seudodistancia como el retardo temporal entre una señal satelital recibida y un reloj local. Además, la seudodistancia de interés en el presente documento es el tiempo módulo el periodo marco de la secuencia subyacente de ensanchamiento seudoaleatorio que, para el código de C / A del sistema GPS de los Estados Unidos, es de 1 milisegundo. Obsérvese que la seudodistancia debería distinguirse de la distancia satelital. La distancia satelital es una verdadera distancia desde un satélite a un receptor del SPS. En algunos casos la distancia se expresa en unidades temporales dividiendo la distancia (en metros, por ejemplo) por la velocidad de la luz.
Los datos de efemérides y temporización del satélite se extraen desde la señal del GPS una vez que es adquirida y rastreada. Como se ha expuesto anteriormente, recolectar esta información normalmente lleva un tiempo relativamente largo (de 30 segundos a varios minutos) y debe efectuarse con un buen nivel de señal recibida a fin de lograr bajas tasas de errores. Esta invención se refiere principalmente a procedimientos rápidos para determinar las seudodistancias de satélites a la vista, preferiblemente todos los satélites a la vista.
La mayoría de los receptores del GPS utilizan procedimientos de correlación para calcular seudodistancias. Estos procedimientos de correlación se llevan a cabo habitualmente en tiempo real, a menudo con correlacionadores de hardware. Las señales del GPS contienen señales repetitivas de alta velocidad llamadas secuencias seudoaleatorias (PN). Los códigos disponibles para aplicaciones civiles se llaman códigos C / A, y tienen una tasa binaria de inversión de fase, o tasa de “mella”, de 1,023 MHz, y un periodo de repetición de 1.023 segmentos de código para un periodo de código de 1 mseg. Las secuencias de código pertenecen a una familia conocida como códigos Oro. Cada satélite del GPS emite una señal con un único código Oro.
Para una señal recibida desde un satélite dado del GPS, a continuación de un proceso de conversión descendente hacia la banda base, un receptor de correlación multiplica las señales recibidas por una réplica almacenada del código Oro adecuado contenido dentro de su memoria local, y luego integra, o filtra por paso bajo, el producto a fin de obtener una indicación de la presencia de la señal. Este proceso se denomina una operación de “correlación”. Ajustando secuencialmente la temporización relativa de esta réplica almacenada con respecto a la señal recibida, y observando la magnitud de la salida de correlación, o un promedio de un conjunto de salidas sucesivas, el receptor puede determinar el retardo temporal entre la señal recibida y un reloj local. La determinación inicial de la presencia de tal salida se denomina “adquisición”. Una vez que ocurre la adquisición, el proceso ingresa a la fase de “rastreo”, en la cual la temporización de la referencia local se ajusta en pequeñas cantidades, a fin de mantener una salida de alta correlación. La salida de correlación durante la fase de rastreo puede verse como la señal del GPS con el código seudoaleatorio quitado o, en la terminología común, “desensanchado”. Esta señal es de banda estrecha, con un ancho de banda habitualmente conmensurable con una señal de datos modulados por desplazamiento de fase binaria de 50 bits por segundo, que se superpone sobre la onda del GPS.
El proceso de adquisición de correlación consume mucho tiempo, especialmente si las señales recibidas son débiles. Esto es porque un correlacionador debe buscar la época de trama del PN en serie sobre todas las posibles
1.023 posiciones de segmento de código del código de PN. Para mejorar el tiempo de adquisición, la mayoría de los receptores del GPS utilizan una multiplicidad de correlacionadores (hasta 12 habitualmente) que permiten una búsqueda paralela sobre las posibles posiciones de épocas para un pico de correlación.
Un procedimiento de adquisición alternativo, descrito en un ejemplo de un procedimiento en la Patente Estadounidense 5.663.734, proporciona mayor sensibilidad y mayor velocidad de procesamiento, efectuando un gran número de operaciones de FFT (Transformada Rápida de Fourier) junto con operaciones especiales optativas de preprocesamiento y posprocesamiento. En este procedimiento, los datos recibidos se subconvierten a una frecuencia baja adecuada intermedia, se digitalizan y se almacenan en una memoria temporal. Estos datos se someten luego a operaciones usando, en un ejemplo, un Circuito Integrado de procesamiento programable de señales digitales que lleva a cabo la FFT precitada y otras operaciones. En efecto, estas operaciones permiten la implementación paralela de un gran número de correlacionadores (miles). Además, dado que las operaciones se efectúan sobre un único conjunto de datos, o “bloque”, no están sujetas a los fluctuantes niveles de señal y a la naturaleza cambiante del entorno de señales común a los enfoques de correlacionadores.
Como se ha expuesto anteriormente, la primera tarea de un receptor del GPS es determinar el tiempo de las llegadas, o las seudodistancias, de cada uno de los satélites del GPS que puede ver. Esto se hace por medio de un proceso de búsqueda. Hay dos variables principales que requieren búsqueda sobre sí: el tiempo y la frecuencia. Como se ha expuesto anteriormente, la estructura de marco aleatorio de cada señal del GPS hace necesario buscar por los 1.023 segmentos de código del código para establecer una sincronización inicial de trama de PN. Sin embargo, en general, habrá una falta de conocimiento preciso de la frecuencia portadora de cada señal del GPS. Normalmente, esto implica que también es necesario buscar entre un conjunto de frecuencias portadoras. En caso contrario, un error en la frecuencia portadora puede resultar en una falta de una salida de correlación fuerte en todas las posibles posiciones de épocas. La incertidumbre en la frecuencia portadora se debe a tres factores: (A) Doppler asociado a los satélites, que es menor que + 4 kHz, (B) Doppler asociado a la plataforma receptora si está en movimiento, que es habitualmente menor que varios cientos de Hz y (C) errores de frecuencia asociados al oscilador de referencia (Oscilador Local) en el receptor del GPS, que pueden oscilar entre cientos de Hz hasta decenas de kilohercios,... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento para adquirir inicialmente señales del sistema de posicionamiento de satélites, SPS, procedimiento implementado en un receptor (16, 17, 22, 75, 101) del SPS y que comprende:
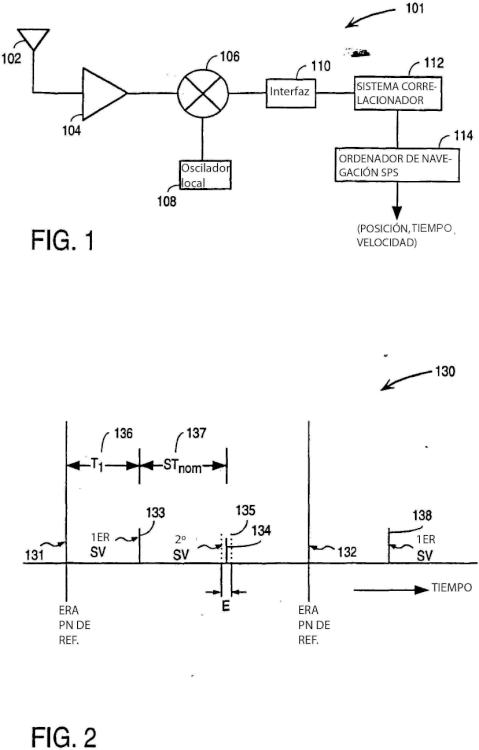
determinar (161) un primer tiempo de llegada (133, 138) de una secuencia seudoaleatoria, PN, época de una señal de un primer satélite del SPS con respecto a una época (131, 132) de PN de referencia que está generada localmente en el receptor del SPS;
determinar (163) una ubicación estimada de dicho receptor (16, 17, 22, 75, 101) del SPS;
determinar un tiempo del día;
determinar una posición de dicho primer satélite del SPS y una posición de un segundo satélite del SPS, usando dicho tiempo del día e información de posición satelital;
caracterizado por
usar dicha ubicación estimada de dicho receptor del SPS y las posiciones determinadas de dichos satélites del SPS primero y segundo para determinar una distancia estimada R1 desde dicha ubicación estimada de dicho receptor del SPS a dicho primer satélite del SPS, y una distancia estimada R2 desde dicha ubicación estimada de dicho receptor del SPS a dicho segundo satélite del SPS;
determinar (165) un tiempo de llegada (134) estimado de una época de PN de la señal del segundo satélite del SPS, con respecto a dicha época (131, 132) de PN de referencia, determinando un desplazamiento temporal (δTnom, 137) con respecto a dicha primera hora de llegada (133, 138), calculándose dicho desplazamiento temporal (δTnom, 137) con la expresión (R2 -R1) / c, donde c es la velocidad de la luz;
buscar (169) el tiempo de llegada de señales del SPS desde dicho segundo satélite del SPS en una gama de búsqueda (E, 135) alrededor de dicha hora de llegada (134) estimada de una época de PN del segundo satélite del SPS.
2. Un procedimiento según la reivindicación 1, en el cual dicho tiempo de llegada (134) estimado de una época de PN de la señal del segundo satélite del SPS no se basa en un tiempo de llegada previamente determinada de una época de PN de la señal del segundo satélite del SPS.
3. Un procedimiento según la reivindicación 2, en el cual dicha tiempo del día es un tiempo del día aproximado, que es exacto dentro de un rango de 10 minutos.
4. Un procedimiento según la reivindicación 1, en el cual dicha gama de búsqueda (E, 135) se basa en un error asociado a al menos una entre dicha ubicación estimada y dicha hora del día, dicha posición de dicho primer satélite del SPS y dicha posición de dicho segundo satélite del SPS.
5. Un procedimiento según la reivindicación 1, que comprende adicionalmente:
determinar una posición satelital de un tercer satélite del SPS, usando dicha hora del día e información de posición satelital;
usar dicha ubicación estimada y la posición determinada de dicho tercer satélite para determinar una distancia estimada R3 desde dicho receptor del SPR al tercer satélite;
determinar una hora de llegada estimada de una época de PN de la señal del tercer satélite del SPS con respecto a dicha época de PN de referencia.
6. Un procedimiento según la reivindicación 5, que comprende adicionalmente buscar (169) señales del SPS provenientes de dicho tercer satélite del SPS en una gama de búsqueda alrededor de dicha hora de llegada estimada de una época de PN de la señal del tercer satélite del SPS.
7. Un procedimiento según la reivindicación 1, en el cual dicha hora del día es una hora del día aproximada en dicho receptor (16, 17, 22, 75, 101) del SPS, que tiene una precisión superior a 10 minutos, y en el cual dichas posiciones de satélite están determinadas a partir de una fuente externa que transmite un conjunto de datos de efemérides correspondientes a un conjunto de satélites del SPS visibles por parte de dicho receptor (16, 17, 22, 75, 101) del SPS.
8. Un procedimiento según la reivindicación 1, en el cual dicha información de posición de satélite comprende al menos uno entre (a) un conjunto de datos de efemérides correspondientes a un conjunto de satélites del SPS
visibles por dicho receptor (16, 17, 22, 75, 101) del SPS; o (b) un conjunto de datos de Almanaque correspondientes a dicho conjunto de satélites del SPS visibles por dicho receptor (16, 17, 22, 75, 101) del SPS.
9. Un procedimiento según la reivindicación 8, en el cual dicho conjunto de datos de efemérides se obtiene de una red (62) de referencia de receptores del SPS.
10. Un procedimiento según la reivindicación 8, en el cual dicho conjunto de datos de Almanaque se obtiene de una red (62) de referencia de receptores del SPS.
11. Un procedimiento según la reivindicación 8, en el cual dicho conjunto de datos de efemérides se obtiene de un receptor (90) de referencia del SPS en una sede celular (13, 15, 19, 21) que está en comunicación con dicho receptor (16, 17, 22, 75, 101) del SPS.
12. Un procedimiento según la reivindicación 8, en el cual dicho conjunto de datos de Almanaque se obtiene de un receptor (90) de referencia del SPS en una sede celular (13, 15, 19, 21) que está en comunicación con dicho receptor (16, 17, 22, 75, 101) del SPS.
13. Un procedimiento según la reivindicación 8, en el cual dicho conjunto de datos de Almanaque es obtenido por dicho receptor (16, 17, 22, 75, 101) del GPS a partir de señales del SPS provenientes de satélites del SPS.
14. Un procedimiento según la reivindicación 1, en el cual dicha ubicación estimada se obtiene de una fuente de información basada en células.
15. Un procedimiento según la reivindicación 1, en el cual la información de el tiempo del día se determina por un procedimiento entre: lectura del receptor del SPS de un mensaje de datos de satélite en una señal desde el primer satélite del SPS, uso por el receptor del SPS de un contador de tiempo transcurrido, recepción por el receptor del SPS de una señal WWV emitida que proporciona información de temporización y la recepción por el receptor del SPS de una señal de comunicación transmitida por un sistema de comunicación basado en células, y la lectura del mensaje de el tiempo del día presente con la señal de comunicación basada en células.
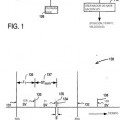
16. Un receptor (16, 17, 22, 75, 101) del sistema de posicionamiento de satélites, SPS, que comprende:
una antena (77, 102) del SPS que está configurada para recibir señales del SPS,
medios (114) de procesamiento acoplados con dicha antena (77, 102) del SPS, estando dichos medios (114) de procesamiento dispuestos para:
determinar una primera hora de llegada (133, 138) de una secuencia seudoaleatoria, PN, época de una señal de un primer satélite del SPS, con respecto a una época de PN de referencia;
determinar una posición de dicho primer satélite del SPS y una posición de un segundo satélite del SPS, usando dicha hora del día e información de posición de satélite;
caracterizado por estar dispuesto para:
usar dicha ubicación estimada de dicho receptor de SPS y las posiciones determinadas de dichos satélites primero y segundo del SPR para determinar una distancia estimada R1 desde dicha ubicación estimada de dicho receptor del SPS hasta el primer satélite del SPS y una distancia estimada R2 desde dicha ubicación estimada de dicho receptor del SPS hasta el segundo satélite del SPS;
determinar (165) un hora de llegada (134) estimada de una época de PN de la señal del segundo satélite del SPS, con respecto a dicha época (131, 132) de PN de referencia, determinando un desplazamiento temporal (δTnom, 137) con respecto a dicha primera hora de llegada (133, 138), calculándose dicho desplazamiento temporal (δTnom, 137) con la expresión (R2 -R1) / c, donde c es la velocidad de la luz;
buscar (169) el tiempo de llegada de señales del SPS desde dicho segundo satélite del SPS en una gama de búsqueda (E, 135) alrededor de dicha hora de llegada (134) estimada de una época de PN del segundo satélite del SPS.
17. Un receptor (16, 17, 22, 75, 101) del SPS según la reivindicación 16, que comprende adicionalmente un sistema de comunicación que está acoplado con dichos medios (114) de procesamiento, en el cual dicho sistema de comunicación proporciona dicha ubicación estimada a dicho procesador (114).
18. Un receptor (16, 17, 22, 75, 101) del SPS según la reivindicación 16, en el cual dicha hora de llegada (134) estimada de una época de PN de la señal del segundo satélite del SPS no se basa en una hora de llegada previamente determinada de una época de PN de la señal del segundo satélite del SPS.
19. Un receptor (16, 17, 22, 75, 101) del SPS según la reivindicación 16, en el cual dicha información de posición de satélite es recibida desde una fuente externa, que es una entre un satélite del SPS o un sistema de comunicación basado en células, y dicha hora del día está determinada a partir de una señal de comunicación en un sistema de comunicación basado en células.
5 20. Un receptor (16, 17, 22, 75, 101) del SPS según la reivindicación 16, en el cual dicho medio (114) de procesamiento está adicionalmente dispuesto para:
determinar una posición satelital de un tercer satélite del SPS usando dicha hora del día e información de posición de satélite; y
usar dicha ubicación estimada y la posición determinada de dicho tercer satélite para determinar una distancia 10 estimada R3 desde dicho receptor del SPS al tercer satélite;
determinar una hora de llegada estimada de una época de PN de la señal del tercer satélite del SPS, con respecto a dicha época (131, 132) de PN de referencia.
21. Un receptor (16, 17, 22, 75, 102) del SPS según la reivindicación 16, en el cual el medio de procesamiento está dispuesto para obtener el tiempo del día por un procedimiento entre: lectura de un mensaje de datos de satélite en una señal desde el primer satélite del SPS, un contador de tiempo transcurrido en el receptor del SPS, recepción de una señal WWV emitida que proporciona información de temporización y la recepción de una señal de comunicación transmitida por una señal de comunicación basada en células, y la lectura del mensaje de el tiempo del día presente con la señal de comunicación basada en células.
22. Un programa de ordenador adaptado para realizar el procedimiento de cualquiera de las reivindicaciones 1 a 15 cuando es ejecutado por el medio de procesamiento de un receptor del sistema de posicionamiento de satélites, SPS.
Patentes similares o relacionadas:
RECEPTOR GPS PERFECCIONADO QUE UTILIZA INFORMACIÓN DE LA POSICIÓN DE LOS SATÉLITES PARA COMPENSAR EL EFECTO DOPPLER, del 9 de Febrero de 2012, de SNAPTRACK INC.: Procedimiento para determinar la posición de una unidad remota , que comprende: recibir, en dicha unidad remota , datos de almanaque de […]
Método para potenciar la seguridad de navegación de un vehículo proporcionando al vehículo datos de navegación en tiempo real mediante una red de comunicaciones móviles, sistema para potenciar la seguridad de navegación de un vehículo proporcionando al vehículo datos de navegación en tiempo real mediante una red de comunicaciones móviles, programa y producto de programa informático, del 22 de Julio de 2020, de DEUTSCHE TELEKOM AG: Método para potenciar la seguridad de navegación de un vehículo proporcionando al vehículo datos de navegación en tiempo real mediante una red de comunicaciones […]
Servicios sensibles al contexto, del 24 de Junio de 2020, de Nokia Technologies OY: Un método que comprende: recibir, en un dispositivo inalámbrico , señales de sensor que caracterizan una o más condiciones ambientales, […]
Método y dispositivo para mejorar la determinación de la posición, del 27 de Mayo de 2020, de DEUTSCHE TELEKOM AG: Método para mejorar la determinación de la posición de un dispositivo de comunicación móvil, con las siguientes etapas de método: a) proporcionar una información […]
Localización de una baliza de emergencia, del 20 de Mayo de 2020, de THALES: Un procedimiento implementado por ordenador para procesar la señal transmitida por una baliza de emergencia, siendo recibida dicha señal por […]
Procedimientos y sistemas para la detección mejorada de mensajes de navegación electrónica, del 6 de Mayo de 2020, de exactEarth Ltd: Un procedimiento de generación y transmisión de una señal de sistema de identificación automática, AIS, que comprende un mensaje de navegación electrónica, comprendiendo […]
Procedimiento y aparato para admitir el posicionamiento de terminales en una red inalámbrica, del 4 de Diciembre de 2019, de QUALCOMM INCORPORATED: Un procedimiento de comunicación inalámbrica, que comprende: intercambiar una pluralidad de mensajes de posicionamiento para […]
Dispositivo y método para calcular estadísticas de golf, del 20 de Noviembre de 2019, de Skyhawke Technologies, LLC: Un dispositivo de reconocimiento de localización que comprende: un sensor de determinación de posición que determina una posición del dispositivo […]