CORRECCIÓN LO EN UN RECEPTOR GPS.
Procedimiento para la corrección de una señal generada por un oscilador local (606) en un receptor GPS móvil,
comprendiendo dicho procedimiento: recibir una señal modulada sobre una frecuencia portadora de precisión desde una fuente que proporciona dicha señal modulada, siendo dicha fuente una estación base o un satélite que emula a una estación base; enganchar automáticamente a dicha señal modulada y proporcionar una señal de referencia (604) enganchada en frecuencia a la frecuencia portadora de precisión; calcular la deriva del oscilador local mediante la comparación de la señal de referencia con una señal generada por dicho oscilador local y generar una señal de corrección de error, transmitir dicha señal de corrección de error (610) a un componente DSP (620) para eliminar los efectos de la deriva del oscilador local, siendo utilizado dicho oscilador local para adquirir señales GSP
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06124620.
Solicitante: SNAPTRACK INC..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 5775 MOREHOUSE DRIVE SAN DIEGO, CA 92121 ESTADOS UNIDOS DE AMERICA.
Inventor/es: KRASNER, NORMAN F..
Fecha de Publicación: .
Fecha Solicitud PCT: 8 de Octubre de 1996.
Clasificación PCT:
- G01S1/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › Balizas o sistemas de balizas que transmiten señales que tienen una o más características que pueden ser detectadas por receptores no direccionales y que definen direcciones, posiciones o líneas de posición fijas con relación a los transmisores de las balizas; Receptores asociados a ellas (fijación de la posición mediante la coordinación de una pluralidad de determinaciones de líneas de posición o direcciones G01S 5/00).
Países PCT: Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Países Bajos, Suecia, Portugal, Irlanda, Finlandia.
PDF original: ES-2357300_T3.pdf
Fragmento de la descripción:
ANTECEDENTES DE LA INVENCIÓN
SOLICITUDES RELACIONADAS
La presente solicitud se refiere a dos solicitudes de patente presentadas por el mismo inventor en la misma fecha de esta solicitud; siendo estas dos solicitudes: 5
“An Improved GPS Receiver Utilizing a Communication Link” (“Receptor GPS mejorado que utiliza un enlace de comunicaciones” (número de serie 08/612.582, presentada el 8 de marzo de 1996);
“An Improved GPS Receiver Having Power Management” (“Receptor GPS mejorado que presenta gestión de potencia”, número de serie 08/613.966, presentada el 8 de marzo de 1996).
La presente solicitud está relacionada asimismo con una solicitud de patente provisional (y por la presente se 10 reivindica el beneficio de su fecha de presentación) del mismo inventor, Norman F. Krasner, cuya solicitud se titula “Low Power, Sensitive Pseudorange Measurement Apparatus and Method for Global Positioning Satellites Systems” (“Aparato y procedimiento para la medición sensible de baja potencia de pseudodistancias para sistemas de satélites de posicionamiento global”), número de serie 60/005.318, presentada el 9 de octubre de 1995.
Una parte de la descripción de la presente memoria de patente contiene material sujeto a protección de 15 protección de los derechos de autor. El propietario de los derechos de autor no se opone a que cualquier persona realice una reproducción facsímil del documento de patente o de la descripción de la patente, tal como aparece en los archivos o registros de patentes de la Oficina de Patentes y Marcas, aunque por otro lado se reserva todos los derechos de autor de cualquier tipo.
i) CAMPO DE LA INVENCIÓN 20
La presente invención se refiere a unos receptores capaces de determinar una información de la posición de unos satélites y, en particular, se refiere a aquellos receptores que encuentran aplicación en sistemas de posicionamiento global vía satélite (GPS).
ii) ANTECEDENTES DE LA TÉCNICA
Los receptores GPS normalmente determinan su posición calculando los instantes relativos de llegada de unas 25 señales transmitidas simultáneamente desde una serie de satélites GPS (o NAVSTAR). Estos satélites transmiten, como parte de su mensaje, tanto los datos de posición del satélite como los datos de sincronización del reloj, los así denominados datos de "las efemérides". El procedimiento de búsqueda y adquisición de señales GPS, leyendo los datos de las efemérides para una serie de satélites y calculando la posición del receptor a partir de estas informaciones requiere mucho tiempo, habitualmente varios minutos. En muchos casos, este tiempo de procesamiento es inaceptable 30 y, adicionalmente, limita en gran medida la duración de la batería en aplicaciones portátiles micro-miniaturizadas.
Otra limitación de los receptores GPS actuales es que su funcionamiento está limitado a situaciones en las cuales varios satélites están claramente a la vista, sin obstáculos, y en las que se ha dispuesto una antena de buena calidad de manera apropiada para recibir tales señales. Como tal, normalmente no se pueden utilizar en aplicaciones portátiles montadas sobre un cuerpo sólido; en áreas donde existe mucha vegetación, o una obstaculización de la 35 comunicación producida por la presencia de edificios; y en aplicaciones en interior de edificios.
Existen dos funciones principales en los sistemas receptores GPS:
(1) cálculo de las pseudodistancias a los diferentes satélites GPS, y
(2) cálculo de la posición de la plataforma receptora utilizando estos datos de las pseudodistancias, de sincronización de los satélites y de las efemérides. 40
Las pseudodistancias son simplemente los retardos de tiempo medidos entre la señal recibida desde cada satélite y el reloj local. Los datos de las efemérides y de sincronización del satélite son extraídos de la señal GPS una vez ésta ha sido adquirida y se ha habilitado su seguimiento continuo. Tal como se ha indicado anteriormente, la recolección de esta información lleva normalmente un tiempo relativamente largo (de 30 segundos a varios minutos) y debe ser realizada con un buen nivel de señal recibida para alcanzar tasas de error bajas. 45
Casi todos los receptores GPS conocidos utilizan procedimientos de correlación para calcular pseudodistancias. Estos procedimientos de correlación son realizados en tiempo real, a menudo mediante dispositivos hardware “correlacionadores”. Las señales GPS contienen unas señales repetitivas de tasa elevada denominadas secuencias pseudoaleatorias (PN). Los códigos disponibles para aplicaciones civiles se denominan códigos C/A, y presentan una tasa de inversión de fase binaria, o tasa de "chipping", de 1,023 MHz y un periodo de repetición de 1.023 50 chips para un periodo de código de 1 milisegundo. Las secuencias de código pertenecen a una familia denominada códigos Gold. Cada satélite GPS emite una señal con un código Gold unívoco.
Para una señal recibida desde un satélite GPS dado, siguiendo un procedimiento de desmodulación a banda base, un receptor de tipo correlador realiza la multiplicación de la señal recibida con una réplica del código Gold adecuado contenido en su memoria local, y a continuación integra, o filtra basa-bajas, el producto para obtener una indicación de la presencia de la señal. Este procedimiento se denomina una operación de “correlación”. Mediante el ajuste secuencial de la sincronización relativa de esta réplica almacenada asociada a la señal recibida, y observando la 5 salida de la correlación, el receptor puede determinar el retardo de tiempo entre la señal recibida y un reloj local. La determinación inicial de la presencia de una salida de este tipo se denomina “adquisición”. Una vez ha tenido lugar la adquisición, el procedimiento entra en la fase de “seguimiento continuo” en la cual se ajusta la sincronización de la referencia local en pequeñas cantidades para mantener una salida elevada de la correlación.
La salida de la correlación durante la fase de seguimiento continuo puede entenderse como la señal GPS con 10 el código pseudoaleatorio eliminado, o, expresado en terminología común, “desexpandida”. Esta señal es de banda estrecha, con un ancho de banda proporcional al de una señal de datos binaria de 50 bits/seg modulada por desplazamiento de fase superpuesta a la forma de onda GPS.
El procedimiento de adquisición por correlación requiere mucho tiempo, especialmente si las señales recibidas son de baja intensidad. Para mejorar el tiempo de adquisición, la mayoría de los receptores GPS utilizan una serie de 15 correladores (típicamente hasta 12) que permiten una búsqueda en paralelo de picos de correlación.
Algunos receptores GPS anteriores han utilizado técnicas FFT para determinar la frecuencia Doppler de la señal GPS recibida. Estos receptores utilizan operaciones de “correlación” convencionales para desexpandir la señal GPS y proporcionar una señal de banda estrecha con un ancho de banda típicamente dentro del intervalo de 10 kHz a 30 kHz. A continuación, la señal de banda estrecha resultante experimenta un análisis de Fourier utilizando unos 20 algoritmos FFT para determinar la frecuencia portadora. La determinación de dicha portadora proporciona simultáneamente una indicación de que la referencia PN local está ajustada con la fase correcta de la señal recibida y proporciona una medición precisa de la frecuencia portadora. A continuación, se puede utilizar esta frecuencia en la operación de seguimiento continuo de los receptores.
El documento JP 05 297 105 da a conocer un receptor GPS que detecta el error del oscilador estándar 25 comparando su frecuencia de salida con una señal de sincronización recibida a través de una antena.
La patente US nº 5.420.592 de Johnson discute el empleo de unos algoritmos FFT para calcular unas pseudodistancias en un emplazamiento central de procesamiento en lugar de en una unidad móvil. Según ese procedimiento, el receptor GPS recoge una copia instantánea de los datos y a continuación son transmitidos por un enlace de datos hacia un receptor remoto donde experimentan el procesamiento FFT. Sin embargo, el procedimiento 30 que se da a conocer en la misma calcula sólo una única Transformada Rápida de Fourier directa e inversa (correspondiente... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la corrección de una señal generada por un oscilador local (606) en un receptor GPS móvil, comprendiendo dicho procedimiento:
recibir una señal modulada sobre una frecuencia portadora de precisión desde una fuente que proporciona dicha señal modulada, siendo dicha fuente una estación base o un satélite que emula a una estación base; 5
enganchar automáticamente a dicha señal modulada y proporcionar una señal de referencia (604) enganchada en frecuencia a la frecuencia portadora de precisión;
calcular la deriva del oscilador local mediante la comparación de la señal de referencia con una señal generada por dicho oscilador local y generar una señal de corrección de error,
transmitir dicha señal de corrección de error (610) a un componente DSP (620) para eliminar los efectos de la 10 deriva del oscilador local, siendo utilizado dicho oscilador local para adquirir señales GSP.
2. Procedimiento según la reivindicación 1, en el que dicha señal modulada es una señal de datos que contiene información de datos del satélite comunicada a través de un enlace de comunicaciones, comprendiendo dichos datos de información del satélite una información Doppler de un satélite visionado de dicho receptor GPS móvil.
3. Procedimiento según la reivindicación 1, en el que dicha señal modulada es una señal de datos que 15 contiene información de datos del satélite comunicada a través de un enlace de comunicaciones, comprendiendo dichos datos de información del satélite unos datos representativos de las efemérides de un satélite.
4. Procedimiento según la reivindicación 1, en el que dicha señal modulada es una señal de datos que contiene información de datos del satélite comunicada a través de un enlace de comunicaciones, estando seleccionado dicho enlace de comunicaciones de entre el grupo constituido por un enlace de radiobúsqueda de dos canales o un 20 enlace de teléfono celular o un sistema de comunicaciones personal o radio móvil especializada o un sistema inalámbrico de comunicación de datos por paquetes.
5. Procedimiento según la reivindicación 1, en el que dicha señal modulada es una señal de datos que contiene información de datos del satélite comunicada a través de un enlace de comunicaciones, siendo dicho enlace de comunicaciones un medio de comunicación de radiofrecuencia. 25
6. Procedimiento según la reivindicación 1, en el que la unidad móvil comprende una lógica de control automático de frecuencia que comprende uno de entre un bucle de enganche de fase, o un bucle de enganche de frecuencia, o un estimador de fase de bloque.
7. Procedimiento según la reivindicación 1, que comprende además desmodular unas señales GPS recibidas a través de una antena GPS, utilizando dicha etapa de desmodulación dicha señal de oscilador local para desmodular 30 dichas señales GPS.
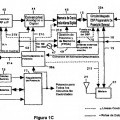
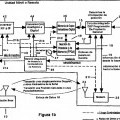
8. Receptor GPS móvil que comprende:
una primera antena (613) para recibir unas señales GPS;
un desmodulador (614) acoplado a dicha primera antena, proporcionando dicha primera antena dichas señales GPS a dicho desmodulador; 35
un oscilador local (606) acoplado a dicho desmodulador, generando dicho oscilador local una primera señal de referencia para dicho desmodulador para desmodular dichas señales GPS de una primera frecuencia a una segunda frecuencia;
una segunda antena (601) para recibir una señal modulada sobre una frecuencia portadora de precisión desde una fuente que proporciona dicha señal modulada, siendo dicha fuente una estación base o un satélite que 40 emula a una estación base;
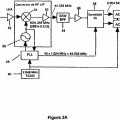
un circuito de control automático de frecuencia (AFC) (603) acoplado a dicha segunda antena, proporcionando dicho circuito AFC una segunda señal de referencia (604) que está enganchada en frecuencia a dicha frecuencia portadora de precisión; y,
un comparador para calcular la deriva de dicho oscilador local mediante la comparación de la primera señal de 45 referencia con la segunda señal de referencia y mediante la generación de una señal de corrección de error (610), siendo transmitida dicha señal de corrección de error a un componente DSP para eliminar el efecto de la deriva del oscilador local.
9. Receptor GPS móvil según la reivindicación 8, en el que dicho circuito AFC comprende un bucle de enganche de fase acoplado a un receptor que está acoplado a dicha segunda antena.
10. Receptor GPS móvil según la reivindicación 8, que comprende asimismo un receptor acoplado a dicha segunda antena, estando destinado dicho receptor a recibir dicha señal modulada sobre una frecuencia portadora de precisión procedente de dicha segunda antena, en el que dicho receptor recibe dicha señal modulada con una señal de 5 datos que contiene unos datos de información del satélite comunicados a través de dicha segunda antena.
11. Receptor GPS móvil según la reivindicación 10, en el que dicha información de datos del satélite comprende una información Doppler de un satélite visionado de dicho receptor GPS móvil.
12. Receptor GPS móvil según la reivindicación 11, en el que dicha información de datos del satélite comprende una identificación de una pluralidad de satélites visionados de dicho receptor GPS móvil y una pluralidad 10 correspondiente de informaciones Doppler de cada satélite de dicha serie de satélites visionados de dicho receptor GPS móvil.
13. Receptor GPS móvil según la reivindicación 11, en el que dicha información de datos del satélite comprende unos datos representativos de las efemérides de un satélite.
Patentes similares o relacionadas:
Dispositivo de control de aparcamiento, del 29 de Mayo de 2020, de IGLESIAS CANEDA, Ramón: 1. Dispositivo de control de aparcamiento en plazas de aparcamiento con una dirección de entrada de un vehículo a la misma, caracterizado porque […]
Corrección DGNSS para posicionamiento, del 15 de Enero de 2020, de QUALCOMM INCORPORATED: Un procedimiento para realizar posicionamiento, que comprende: obtener un error de rango diferencial de usuario, UDRE y una tasa de crecimiento de […]
DUCHA SOLAR INTELIGENTE Y POLIVALENTE, del 4 de Julio de 2019, de LOPEZ GARCIA, Julio César: 1. Ducha solar inteligente y polivalente, basada en una instalación de ducha convencional provista o no de lava pies, caracterizada por incorporar electrónica programable […]
SISTEMA DE LOCALIZACIÓN PARA KITESURF, del 26 de Julio de 2018, de LATORRE OTERO, Alejandro: Sistema de localización para kitesurf, que comprende: un equipo de tabla (ET) para su fijación a una tabla de kitesurf, que comprende un emisor que emite una señal de […]
Uso de estaciones móviles para la determinación de parámetros de localización de estaciones base en un sistema de comunicación móvil inalámbrico, del 20 de Septiembre de 2017, de QUALCOMM INCORPORATED: Un procedimiento para determinar la posición de una estación base en una red de comunicación inalámbrica, comprendiendo el procedimiento: […]
Procedimiento que proporciona los medios para reconocer el origen y/o el contenido de una señal de RF, del 23 de Agosto de 2017, de THALES: Procedimiento que permite reconocer el origen y/o el contenido de una señal de RF, que comprende las siguientes etapas: - ensanchar una […]
Asistente para la práctica de golf personal y método y sistema para mostrar gráficamente información relacionada con golf y para recoger, procesar y distribuir datos relacionados con golf, del 21 de Junio de 2017, de Skyhawke Technologies, LLC: Un aparato portátil para mostrar distancias entre un golfista y un objeto en un campo de golf, que comprende: un dispositivo informático; un dispositivo de medición […]
Un receptor y transmisor para uso en un sistema de navegación por satélite, del 3 de Mayo de 2017, de EUROPEAN SPACE AGENCY: Un receptor para uso con un sistema de navegación por satélite que comprende una constelación de múltiples satélites en la que cada satélite […]