RECEPTOR GPS Y MÉTODO PARA PROCESAMIENTO DE SEÑALES GPS.
Un método para utilizar un receptor GPS teniendo un sistema de comunicación,
comprendiendo dicho método: activar dicho receptor GPS en un primer modo de operación (como un receptor GPS convencional 12) el cual comprende: recibir las señales GPS de satélites en vista; desmodular dichas señales GPS para extraer la información del satélite con respecto a los satélites en vista y computar la información de seudo distancia para dichos satélites en vista; activar dicho receptor GPS en un segundo modo de operación (como un receptor GPS de toma instantánea 14) el cual comprende: recibir las señales GPS de los satélites en vista; procesar dichas señales GPS para determinar las seudo distancias a los satélites en vista, donde las seudo distancias a los satélites en vista determinadas durante el segundo modo y el primer modo son utilizadas para calcular una posición de dicho receptor GPS; recibir a través de dicho sistema de comunicación una señal; caracterizado además por computar un rumbo del oscilador local por el bloqueo de frecuencia en la señal para compensar un oscilador local del receptor GPS, donde el oscilador local es utilizado para adquirir señales GPS adicionales
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E02015127.
Solicitante: SNAPTRACK INC..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: SUITE 250, 4040 MOORPARK AVENUE SAN JOSE, CA 95117 ESTADOS UNIDOS DE AMERICA.
Inventor/es: KRASNER, NORMAN F..
Fecha de Publicación: .
Fecha Solicitud PCT: 8 de Octubre de 1996.
Fecha Concesión Europea: 15 de Septiembre de 2010.
Clasificación PCT:
- G01S1/04 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 1/00 Balizas o sistemas de balizas que transmiten señales que tienen una o más características que pueden ser detectadas por receptores no direccionales y que definen direcciones, posiciones o líneas de posición fijas con relación a los transmisores de las balizas; Receptores asociados a ellas (fijación de la posición mediante la coordinación de una pluralidad de determinaciones de líneas de posición o direcciones G01S 5/00). › Detalles.
- G01S5/14 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
Clasificación antigua:
- G01S5/14 G01S 5/00 […] › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
Países PCT: Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Países Bajos, Suecia, Portugal, Irlanda, Finlandia.
Fragmento de la descripción:
CAMPO DE LA INVENCIÓN
5 La presente invención se refiere a los receptores capaces de determinar las seudo-distancias de satélites orbitales, y, en particular, se refiere a tales receptores como encontrar la aplicación en sistemas de posicionamiento global de satélite (GPS).
ANTECEDENTES Los receptores GPS normalmente determinan su posición computando los tiempos relativos de llegada de las señales transmitidas simultáneamente desde un conjunto de satélites GPS (o NAVSTAR). Estos satélites transmiten, como parte de su mensaje, ambos datos de posicionamiento de satélite así como los datos de sincronización del reloj, denominados datos “efemérides”. El proceso de búsqueda y adquisición de señales GPS, la lectura de los datos de efemérides para un conjunto de satélites y computación de la ubicación del receptor de estos datos toma mucho tiempo, requiriendo a
15 menudo muchos minutos. En muchos casos, este tiempo de procesamiento prolongado es inaceptable y, además, en gran medida limita la vida de la batería en aplicaciones micro miniaturizadas portátiles. Otra limitación de los actuales receptores GPS es que su operación está limitada a situaciones en las cuales varios satélites están claramente en vista, sin obstrucciones, y donde una antena de buena calidad es posicionada adecuadamente para recibir tales señales. Como tal, normalmente no son
20 utilizados en portátiles, aplicaciones montadas en cuerpo; en áreas donde hay abudancia suficiente de bloque de edificios (por ejemplo cañones urbanos); y en aplicaciones en la construcción. Hay dos funciones principales de sistemas de recepción GPS: (1) la computación de las seudo distancias a varios satélites GPS, y (2) la computación de la posición de la plataforma de recepción utilizando estas seudo distancias y tiempos de satélites y datos de efemérides. Las seudo distancias son simplemente retrasos de tiempo medidos entre la señal recibida desde cada satélite y un reloj local. Las efemérides de satélites y datos de sincronización son extraídos desde la señal GPS una vez que es adquirida y seguida. Como se ha dicho anteriormente, recolectando esta información normalmente toma un tiempo relativamente largo (30 segundos a varios minutos) y debe ser cumplida con un buen nivel de recepción de señal o con el fin de lograr bajas ratas de error.
30 Virtualmente todos los receptores GPS utilizan métodos de correlación para computar las seudo distancias. Las señales GPS contienen señales altamente repetitivas llamadas secuencias seudo aleatorias (PN). Los códigos disponibles para aplicaciones civiles son llamados códigos C/A y tienen una rata de fase inversa binaria, o rata “astillada”, de 1.023 MHz y un período de repetición de 1023 chips para un período de código de 1 msec. Las secuencias de código pertenecen a una familia
35 conocida como códigos Dorados. Cada satélite GPS difunde una señal con un único código Dorado. Para una señal recibida desde un satélite GPS dado, siguiendo un proceso por conversión a una banda base, un receptor de correlación multiplica la señal recibida por una réplica almacenada para el código Dorado apropiado contenido en su memoria local, y luego integra, o filtra de paso bajo, el producto con el fin de obtener una indicación de la presencia de la señal. El proceso es denominado
40 una operación de “correlación”. Secuencialmente ajustando el tiempo relativo de su réplica almacenada relativa a la señal recibida, y observando la correlación de salida, el receptor puede determinar el retraso de tiempo entre la señal recibida y el reloj local. La determinación inicial de la presencia de tal salida es llamada “adquisición”. Una vez que ocurre la adquisición, el proceso entra en una fase de “seguimiento” en la cual el tiempo de la referencia local es ajustado en pequeñas
2 cantidades con el fin de mantener una alta correlación de salida. La correlación de salida durante la fase de seguimiento puede ser vista como la señal GPS con el código de seudo distancia removido, o, en terminología común, “propagación”. Esta señal es de banda angosta, con una banda ancha proporcional con una señal de datos de cambio encriptado de fase binaria de 50 bit por segundo la cual 5 es súper impuesta en la forma de onda de GPS. El proceso de adquisición de la correlación es muy lento, especialmente si las señales recibidas son débiles. Para mejorar el tiempo de adquisición, la mayoría de receptores GPS utilizan un conjunto de correlatores (hasta 12 típicamente) los cuales permiten una búsqueda paralela para picos de correlación. 10 Algunos de los anteriores receptores GPS tienen que utilizar técnicas FFT para determinar la frecuencia Doppler en la señal GPS recibida. Estos receptores utilizan operaciones de correlación convencional para propagar la señal GPS y proveer una señal de banda angosta con una banda ancha típicamente en un rango de 10 kHz a 30 kHz. La señal resultante de banda angosta es entonces analizada Fourier utilizando algoritmos FFT para determinar la frecuencia portadora. La 15 determinación de tal portadora simultáneamente proporciona una indicación de que la referencia PN local es ajustada en la fase correcta de la señal recibida y proporciona una medida exacta de la frecuencia portadora. Esta frecuencia puede entonces ser utilizada en la operación de seguimiento de los receptores. La patente de los estados Unidos No. 5,420,592 a Johnson divulga el uso de algoritmos FFT 20 para computar las seudo distancias en una ubicación de procesamiento central en lugar de una unidad móvil. De acuerdo a ese método, una toma instantánea de datos es recolectada por un receptor GPS y luego transmitida sobre un enlace de datos a un receptor remoto donde se somete al procesamiento FFT. Sin embargo, el método divulgado en él computa solo una Transformada de Fourier Rápida sencilla hacia adelante e inversa (correspondiente a cuatro períodos PN) para llevar a cabo el ajuste de 25 las correlaciones. RESUMEN De acuerdo a la presente invención se provee un método para utilizar un receptor GPS que tiene un sistema de comunicación de acuerdo a la reivindicación 1. recibir las segundas señales GPS de satélites en vista; 30 procesar dichas segundas señales GPS, para determinar las seudo distancias en satélites en vista; recibir a través de dicho sistema de comunicación una señal; bloquear dicha señal para generar un oscilador local GPS. De acuerdo también con la presente invención se provee un receptor de modo dual que 35 comprende de acuerdo a la reivindicación 9. Además de acuerdo a la presente invención se provee una máquina de lectura de medios que contiene instrucciones de programa de computador ejecutable de acuerdo a la reivindicación 17. BREVE DESCRIPCIÓN DE LOS DIBUJOS La presente invención se ilustra a manera de ejemplo y no de limitación con las figuras de los 40 dibujos acompañantes en los cuales las referencias indican elementos similares y en los cuales:
Las Figuras 1A – 1D son diagramas de bloque de la mayoría de componentes de un sistema de recepción GPS remoto utilizando el aparato y los métodos de la presente invención;
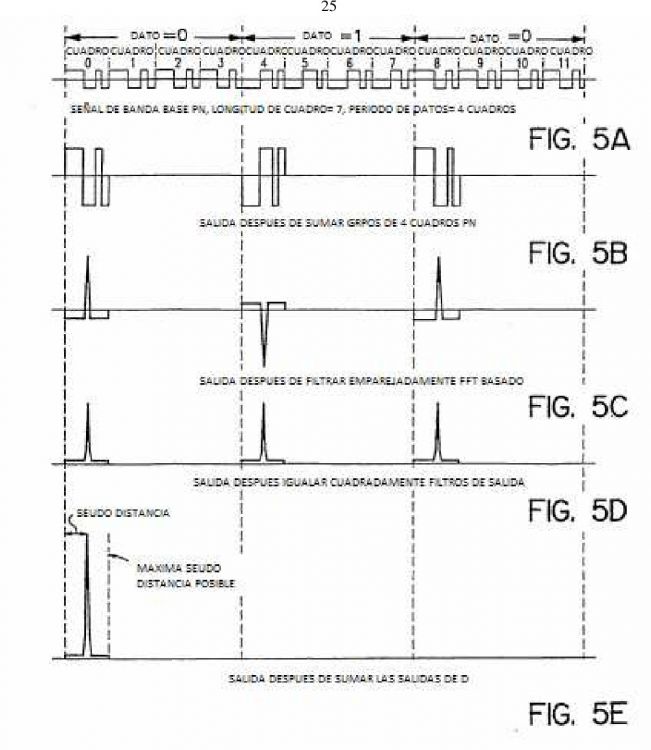
3 La Figura 2 es un diagrama de bloque de una realización de ejemplo del modo dual del sistema de recepción GPS correspondiente a la Figura 1C y utilizando el aparato y los métodos de la presente invención; Las figuras 3A y 3B proveen dos alternativas para las porciones RF e IF del modo 5 dual del receptor GPS que se ilustra en la Figura 2; La Figura 4 muestra un diagrama de flujo de la mayoría de operaciones de software llevadas a cabo por un procesador DSP programable como se ilustra en la Figura 2 de acuerdo con la presente invención; y Las figura 5A – 5E ilustran el procesamiento de las formas de onda de la señal en 10 varias etapas de procesamiento en el modo dual del receptor GPS de acuerdo a la presente invención. DESCRIPCIÓN DETALLADA Esta invención se refiere al aparato y los métodos para computar la posición de un receptor de sistema de posicionamiento global (GPS) móvil, o remoto con niveles muy bajos de señal 15 recibidos. Como se ilustra en las Figuras 1A – 1D, un receptor GPS 10 tiene un primer circuito para recibir y procesar las secuencias seudo aleatorias transmitidas por un número de satélites GPS. El primer circuito es configurado para llevar a cabo operaciones de correlación convencionales en las secuencias seudo aleatorias recibidas para determinar las seudo distancias desde el receptor GPS a los satélites GPS. De acuerdo a esto, el primer circuito se refiere adjunto como...
Reivindicaciones:
1. Un método para utilizar un receptor GPS teniendo un sistema de comunicación, comprendiendo dicho método: activar dicho receptor GPS en un primer modo de operación (como un
5 receptor GPS convencional 12) el cual comprende: recibir las señales GPS de satélites en vista; desmodular dichas señales GPS para extraer la información del satélite con respecto a los satélites en vista y computar la información de seudo distancia para dichos satélites en vista; activar dicho receptor GPS en un segundo modo de operación (como un
receptor GPS de toma instantánea 14) el cual comprende: recibir las señales GPS de los satélites en vista; procesar dichas señales GPS para determinar las seudo distancias a los satélites en vista, donde las seudo distancias a los satélites en vista determinadas durante el segundo modo y el primer modo son utilizadas para calcular una posición de dicho receptor GPS; recibir a través de dicho sistema de comunicación una señal;
caracterizado además por
computar un rumbo del oscilador local por el bloqueo de frecuencia en la señal para compensar un oscilador local del receptor GPS, donde el oscilador local es utilizado para adquirir señales GPS adicionales.
2. Un método como en la reivindicación 1 donde durante dicho primer modo, dicha
información del satélite es extraída de dichas señales GPS y almacenada en una 25 memoria.
3. Un método como en la reivindicación 1 donde dicha señal comprende una portadora y donde dicho bloqueo de frecuencia comprende un bloqueo de frecuencia a dicha portadora.
4. Un método como en la reivindicación 3 donde dicho receptor GPS en dicho primer
30 modo determina una posición de dicho receptor GPS de dicha información de seudo distancia y desde dicha información de satélite, y donde dicho receptor GPS en dicho segundo modo determina dichas seudo distancias y transmite dichas seudo distancias para la determinación de dicha posición o dicho receptor GPS.
5. Un método como en la reivindicación 1 que además comprende en dicho segundo modo: recibir asistencia de datos no diferencial del satélite GPS para dicho sistema de comunicación.
6. Un método como en la reivindicación 5 donde dicha asistencia de datos no
diferencial del satélite GPS comprende al menos uno de: 40 (a) información de identificación para los satélites en vista;
(b) una vocación aproximada de dicho receptor GPS;
(c) información de efemérides de satélite para los satélites en vista; y
(d) información Doppler para los satélites en vista.
7. Un método como en la reivindicación 6 donde dicha información de satélite en dicho primer modo comprende información de efemérides del primer satélite para los satélites en vista, obteniéndose dicha información de efemérides del primer satélite a partir de dichas primeras señales GPS.
15 convencional 12) dicho receptor GPS recibe señales GPS de los satélites en vista y desmodula dichas señales GPS en los satélites en vista para extraer la información del satélite con respecto a los satélites en vista y computa la información de seudo distancia para dichos satélites en vista, y en dicho segundo modo (como un receptor de toma instantánea GPS 14) dicho receptor GPS recibe las señales GPS de los satélites en vista y recibe a través de dicho sistema de comunicación dicha señal, procesa dichas segundas señales GPS para determinar la seudo distancia a los satélites en vista, y es caracterizado por que además computa un rumbo del oscilador local por el bloqueo de frecuencia en la señal para compensar un oscilador local en el receptor GPS, donde el oscilador local es utilizado para adquirir señales GPS adicionales, donde las seudo distancias a los satélites en vista determinadas durante el segundo modo y la información del satélite extraída durante el primer modo son utilizadas para calcular la posición de dicho receptor GPS. 10. Un receptor de modo dual como en la reivindicación 9 donde durante dicho primer modo, dicha información de satélite se extrae de dichas primeras señales GPS y se almacena en una memoria. 11. Un receptor de modo dual como en la reivindicación 9 donde dicha señal comprende una portadora y donde dicho bloqueo de frecuencia comprende un bloqueo de 35 frecuencia a dicha portadora. 12. Un receptor de modo dual como en la reivindicación 10 donde dicho receptor GPS en dicho primer modo determina una posición de dicho receptor GPS de dicha información de seudo distancia y de dicha información de satélite, y donde dicho receptor GPS en dicho segundo modo determina dichas seudo distancias y transmite 40 dichas seudo distancias para la determinación de dicha posición de dicho receptor GPS. 13. Un receptor de modo dual como en la reivindicación 9 donde ducho receptor GPS recibe asistencia de datos no diferenciadas del satélite GPS de dicho sistema de comunicación en dicho segundo modo. 14. Un receptor de modo dual como en la reivindicación 13 donde dicha asistencia de datos de satélite GPS no diferencial comprende al menos uno de: (a) información de identificación para satélites en vista; (b) una ubicación aproximada de dicho receptor GPS 5 (c) información de efemérides de satélite para satélites en vista; y (d) información Doppler para satélites en vista. 15. Un receptor de modo dual como en la reivindicación 14 donde dicha información de satélite en dicho primer modo comprende la primera información de efemérides de satélite para satélites en vista, obteniéndose dicha primera información de efemérides de satélite de dichas primeras señales GPS. 16. Un receptor de modo dual como en la reivindicación 15 donde dicho receptor GPS en dicho primer modo determina una posición de dicho receptor GPS de dicha información de seudo distancia y de dicha información de efemérides de satélite, y donde dicho receptor GPS opera en dicho primer modo sin ninguna asistencia de datos de dicho sistema de comunicación. 17. Una máquina de medios legibles que contiene instrucciones de programa de computador ejecutables las cuales cuando son ejecutadas por un sistema de procesamiento digital hecen que dicho sistema lleve a cabo un método para utilizar un receptor GPS teniendo un sistema de comunicación, comprendiendo dicho 20 método: activar dicho receptor GPS en un primer modo de operación (como un receptor GPS convencional 12) el cual comprende: recibir señales GPS de satélites en vista; desmodular dichas señales GPS para extraer información con 25 respecto a los satélites en vista y compartir la información de seudo distancia para dichos satélites en vista; activar dicho receptor GPS en un segundo modo de operación (como un receptor GPS de toma instantánea 14) el cual comprende: recibir señales GPS de satélites en vista; procesar dichas señales GPS para determinar las seudo distancias a los satélites en vista, donde las seudo distancias a los satélites en vista determinadas durante el segundo modo y la información de satélite extraída durante el primer modo son usadas para calcular una posición de dicho receptor GPS; recibir a través de dicho sistema de comunicación una señal; caracterizada por, además computar un rumbo de oscilador local por un bloqueo de frecuencia en la señal para compensar un oscilador local en el receptor GPS, donde el oscilador local es utilizado para adquirir 40 señales GPS adicionales. 18. Un medio como en la reivindicación 17 donde durante dicho primer modo, dicha información de satélite es extraída de dichas primeras señales GPS y almacenada en una memoria. 19. Un medio como en la reivindicación 17 donde dicha señal comprende una portadora donde dicho bloqueo de frecuencia comprende un bloqueo de frecuencia a dicha portadora. 20. Un medio como en la reivindicación 19 donde dicho receptor GPS en dicho primer 5 modo determina una posición de dicho receptor GPS de dicha información de seudo distancia y de dicha información de satélite, y donde dicho receptor GPS en dicho segundo modo determina dichas seudo distancias y transmite dichas seudo distancias para la determinación de dicha posición de dicho receptor GPS. 21. Un medio como en la reivindicación 17 donde dicho método además comprende en dicho segundo modo: recibir asistencia de datos no diferencial de satélite GPS de dicho sistema de comunicación. 22. Un medio como en la reivindicación 21 donde dicha asistencia de datos de satélite GPS no diferencial comprende al menos uno de: 15 (a) información de identificación para satélites en vista; (b) una ubicación aproximada de dicho receptor GPS (c) información de efemérides de satélite para satélites en vista; y (d) información Doppler para satélites en vista. 23. Un medio como en la reivindicación 22 donde dicha información de satélite en dicho primer modo comprende la primera información de efemérides de satélite de satélites en vista, obteniéndose dicha primera información de efemérides de satélite a partir de dichas primeras señales GPS. 24. Un medio como en la reivindicación 23 donde dicho receptor GPS en dicho primer modo determina una posición de dicho receptor GPS para dicha información de seudo distancia y dicha información de efemérides de satélite, y donde dicho receptor GPS opera en dicho primer modo sin ninguna asistencia de datos de dicho sistema de comunicación. 5 8. Un método como en la reivindicación 7 donde dicho receptor GPS en dicho primer modo determina una posición de dicho receptor GPS de dicha información de seudo distancia y de dicha información de efemérides del primer satélite, y donde dicho receptor GPS opera en dicho primer modo sin asistencia alguna de datos de dicho sistema de comunicación.
10 9. Un receptor de modo dual que comprende: un sistema de comunicación para recibir una señal; un receptor GPS acoplado a dicho sistema de comunicación, teniendo dicho receptor GPS un primer modo de operación y un segundo modo de operación, donde en dicho primer modo (como un receptor GPS
Patentes similares o relacionadas:
Sistema de posicionamiento para satélite artificial geoestacionario, del 18 de Marzo de 2020, de Sky Perfect JSAT Corporation: Sistema de medición de posición para un satélite artificial geoestacionario , comprendiendo el sistema: dos o más antenas, que incluyen, como […]
Ubicación de la posición para sistemas de comunicación inalámbrica, del 11 de Marzo de 2020, de QUALCOMM INCORPORATED: Un procedimiento, que comprende: recibir una señal piloto de ubicación de la posición desde una estación base en una estación móvil , la señal piloto de ubicación […]
Formato de trama de difusión de tiempo de salida (TOD), del 4 de Marzo de 2020, de QUALCOMM INCORPORATED: Un procedimiento de medición de alcance entre una o más estaciones inalámbricas, STA, y un primer punto de acceso, AP, el procedimiento que comprende: […]
SISTEMA DE AJUSTE FINO PARA LOCALIZACIÓN Y DEFINICIÓN DE OBJETOS MEDIANTE UNA DISPOSICIÓN DE ANTENAS RFID, del 12 de Febrero de 2020, de GUTIÉRREZ GONZÁLEZ, Noel: 1. Sistema de ajuste fino para la localización y definición de objetos mediante una disposición de antenas RFID, y donde dichos objetos pueden estar parados o […]
Sistema y método para proporcionar servicios basados en ubicación a bordo de una aeronave, del 13 de Noviembre de 2019, de THE BOEING COMPANY: Sistema para proporcionar servicios basados en ubicación a bordo de una aeronave para usuarios que tienen dispositivos […]
 Ubicación de la posición para sistemas de comunicación inalámbrica, del 18 de Septiembre de 2019, de QUALCOMM INCORPORATED: Un procedimiento, que comprende:
establecer una sesión de recepción y/o de transmisión discontinuas entre una estación móvil y una célula de servicio de […]
Ubicación de la posición para sistemas de comunicación inalámbrica, del 18 de Septiembre de 2019, de QUALCOMM INCORPORATED: Un procedimiento, que comprende:
establecer una sesión de recepción y/o de transmisión discontinuas entre una estación móvil y una célula de servicio de […]
 Supervisión y/o establecimiento de protocolos de una posición de una herramienta en una caja de ascensor, del 28 de Agosto de 2019, de INVENTIO AG: Sistema para la supervisión y/o creación de protocolo de una posición de una herramienta en una caja de ascensor , comprendiendo el sistema: […]
Supervisión y/o establecimiento de protocolos de una posición de una herramienta en una caja de ascensor, del 28 de Agosto de 2019, de INVENTIO AG: Sistema para la supervisión y/o creación de protocolo de una posición de una herramienta en una caja de ascensor , comprendiendo el sistema: […]
Medición de temporización fina segura, del 14 de Agosto de 2019, de QUALCOMM INCORPORATED: Un aparato para proporcionar un intercambio de medición de temporización fina, FTM, segura que comprende: medios para obtener un valor de token seguro inicial y […]