TURBINA EOLICA Y METODO PARA DETERMINAR AL MENOS UN PARAMETRO DE ROTACION DE UN ROTOR DE TURBINA EOLICA.
Método para determinar al menos un parámetro de rotación (ω
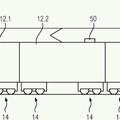
rotor) de un rotor (4) de turbina eólica que gira con una velocidad de rotación (ωrotor) y una fase (θrotor), que comprende las etapas de: - medir una fuerza centrífuga efectiva (Fx) que actúa en una primera dirección predeterminada, que se define en un sistema de coordenadas que gira sincrónicamente con el rotor (4), sobre al menos un objeto (11) de referencia ubicado en o sobre el rotor (4), - establecer una primera frecuencia angular (ωPLL) que representa la velocidad de rotación del rotor (4) basándose en variaciones en la fuerza centrífuga efectiva medida (Fx) debido a la fuerza gravitacional (Fg), - establecer una segunda frecuencia angular (ωyrg) que representa la velocidad de rotación del rotor (4) mediante el uso de al menos un giroscopio (14) de velocidad de guiñada, y - establecer el valor de la velocidad de rotación (ωrotor) como el parámetro rotacional corrigiendo la segunda frecuencia angular (ωyrg) comparándola con la primera frecuencia angular (ωPLL)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06005334.
Solicitante: SIEMENS AKTIENGESELLSCHAFT.
Nacionalidad solicitante: Alemania.
Dirección: WITTELSBACHERPLATZ 2 80333 MUNCHEN ALEMANIA.
Inventor/es: EGEDAL,PER.
Fecha de Publicación: .
Fecha Solicitud PCT: 15 de Marzo de 2006.
Fecha Concesión Europea: 30 de Junio de 2010.
Clasificación Internacional de Patentes:
- F03D7/00 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F03 MAQUINAS O MOTORES DE LIQUIDOS; MOTORES DE VIENTO, DE RESORTES, O DE PESOS; PRODUCCION DE ENERGIA MECANICA O DE EMPUJE PROPULSIVO O POR REACCION, NO PREVISTA EN OTRO LUGAR. › F03D MOTORES DE VIENTO. › Control de los motores de viento (alimentación o distribución de energía eléctrica H02J, p. ej. disposiciones para ajustar, eliminar o compensar la potencia reactiva en las redes H02J 3/18; control de generadores eléctricos H02P, p. ej. disposiciones para el control de generadores eléctricos con el propósito de obtener las características deseadas en la salida H02P 9/00).
- G01P21/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01P MEDIDA DE VELOCIDADES LINEALES O ANGULARES, DE LA ACELERACION, DECELERACION O DE CHOQUES; INDICACION DE LA PRESENCIA, AUSENCIA DE MOVIMIENTO; INDICACION DE DIRECCIÓN DE MOVIMIENTO (midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00; dispositivos de medida combinados para medir dos o más variables de un movimiento G01C 23/00; medida de la velocidad del sonido G01H 5/00; medida de la velocidad de la luz G01J 7/00; medida de la dirección o de la velocidad de objetos sólidos por reflexión o reradiación de ondas radio u otras ondas basada en los efectos de propagación, p. ej. el efecto Doppler, el tiempo de propagación, la dirección de propagación, G01S; medida de la velocidad de radiaciones nucleares G01T). › G01P 21/00 Ensayo o calibrado de aparatos o de dispositivos comprendidos en los otros grupos de esta subclase. › de tacómetros.
- G01P3/16 G01P […] › G01P 3/00 Medida de la velocidad lineal o angular; Medida de diferencias de velocidades lineales o angulares (G01P 5/00 - G01P 11/00 tienen prioridad; midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00). › por utilización de fuerzas centrífugas de masas sólidas.
- G01P3/22 G01P 3/00 […] › transferidos al indicador por medios eléctricos o magnéticos.
- G01P3/44 G01P 3/00 […] › para medir la velocidad angular (G01P 3/56 tiene prioridad).
Clasificación PCT:
- F03D7/04 F03D […] › F03D 7/00 Control de los motores de viento (alimentación o distribución de energía eléctrica H02J, p. ej. disposiciones para ajustar, eliminar o compensar la potencia reactiva en las redes H02J 3/18; control de generadores eléctricos H02P, p. ej. disposiciones para el control de generadores eléctricos con el propósito de obtener las características deseadas en la salida H02P 9/00). › Control automático; Regulación.
- G01P3/16 G01P 3/00 […] › por utilización de fuerzas centrífugas de masas sólidas.
- G01P3/22 G01P 3/00 […] › transferidos al indicador por medios eléctricos o magnéticos.
- G01P3/44 G01P 3/00 […] › para medir la velocidad angular (G01P 3/56 tiene prioridad).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Turbina eólica y método para determinar al menos un parámetro de rotación de un rotor de turbina eólica.
La presente invención se refiere a una turbina eólica y a un método para determinar al menos un parámetro rotacional, tal como velocidad de rotación y fase de un rotor de turbina eólica.
Las turbinas eólicas se usan para producir energía eléctrica a partir de la energía contenida en el viento que sopla. La turbina eólica comprende un rotor impulsado por el viento y que a su vez impulsa un generador de inducción, que habitualmente es un generador de CA.
Cuando la turbina eólica se conecta a una red de suministro de energía eléctrica que requiere una frecuencia determinada, por ejemplo 50 Hz en Europa, la salida de energía eléctrica de la turbina eólica necesita sincronizarse a esta frecuencia. Puesto que las turbinas eólicas modernas a menudo funcionan con velocidad rotacional variable del rotor y, por tanto, del generador de inducción de CA, es necesaria una conversión de la frecuencia producida en el generador a la frecuencia de la red de suministro de energía eléctrica. Habitualmente, esta conversión se realiza transformando el voltaje de CA suministrado por el generador en un voltaje de CC que después se transforma de nuevo en un voltaje de CA con frecuencia fija. Después, el voltaje de CA se introducirá en la red de suministro de energía eléctrica.
Para mantener la frecuencia y el voltaje introducidos en la red de suministro de energía eléctrica en intervalos tolerables, se usan sistemas de control para controlar estos valores. Para los cálculos realizados con respecto a un control de este tipo, es muy útil conocer la velocidad rotacional y el ángulo de fase del rotor, es decir, el ángulo de una línea radial que se extiende desde el centro del rotor y que gira junto con el rotor con respecto a una línea de referencia que no gira a través del centro del rotor. Las turbinas eólicas de velocidad variable que tienen un mecanismo de control para controlar la tensión introducida en la red de suministro de energía eléctrica se dan a conocer, por ejemplo, en el documento WO 2005/091490 A1 o el documento US 5.083.039.
La velocidad rotacional del rotor y el ángulo de fase del rotor se miden habitualmente dentro de la góndola en la que se mide la velocidad rotacional en un eje de baja velocidad o alta velocidad del rotor mediante un sensor inductivo. El ángulo de fase del rotor se mide habitualmente mediante un codificador absoluto colocado en el extremo del anillo de deslizamiento del rotor. Sin embargo, en estas mediciones la velocidad y el ángulo de fase se miden en un marco local de referencia, es decir, con respecto a la posición de la parte superior de la torre de las turbinas eólicas. Esto conduce a errores de medición si la parte superior de la torre se mueve. Estos errores de medición presentan una oscilación cíclica aparente de la velocidad del rotor medida que es sólo un artefacto. Cualquier mecanismo de control basado en valores de medición de este tipo incluye el riesgo de presentar requisitos de control artificial. Además, la medición de velocidad en el eje de alta velocidad carece de información sobre el ángulo de fase del rotor y puede incluir oscilaciones de torsión.
Por tanto, es un objetivo de la presente invención proporcionar un método para determinar al menos un parámetro de rotación de un rotor de turbina eólica. Es un objetivo adicional de la presente invención proporcionar una turbina eólica mejorada, que en particular permita una medición mejorada de al menos un parámetro de rotación de su rotor.
Los objetivos mencionados se resuelven mediante un método para determinar al menos un parámetro de rotación de un rotor de turbina eólica, tal como se reivindica en la reivindicación 1, y mediante una turbina eólica, tal como se reivindica en la reivindicación 6. Las reivindicaciones dependientes definen desarrollos adicionales de la presente invención.
En el método de la invención para determinar al menos un parámetro de rotación de un rotor de turbina eólica que gira con una velocidad de rotación y una fase comprende las etapas de medir una fuerza centrífuga efectiva que actúa en una primera dirección predeterminada, que se define en un sistema de coordenadas que gira sincrónicamente con el rotor, sobre al menos un objeto de referencia ubicado en o sobre el rotor. Basándose en variaciones en la fuerza centrífuga efectiva medida se establece una primera frecuencia angular que representa la velocidad de rotación del rotor. Se establece una segunda frecuencia angular que representa la velocidad de rotación del rotor mediante el uso de al menos un giroscopio de velocidad de guiñada. Para establecer el valor de la velocidad de rotación como el parámetro rotacional, esta segunda frecuencia angular se corrige comparándola con la primera frecuencia angular.
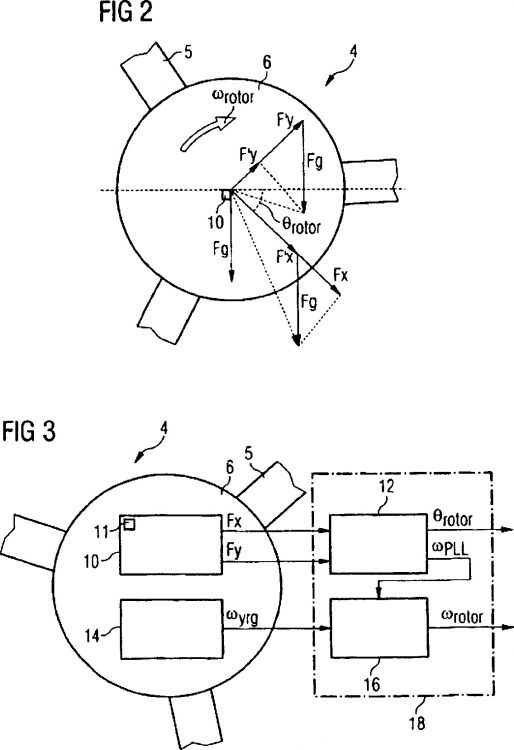
Mediante el método de la invención siempre se mide la velocidad de rotación del rotor en un marco global de referencia, evitando de ese modo errores provocados por movimientos de la parte superior de la torre. La fuerza centrífuga efectiva medida varía durante el período de rotación del rotor. La razón de esto es que la fuerza centrífuga efectiva medida viene dada por la suma de la fuerza centrífuga real, es decir, la fuerza centrífuga que resulta del movimiento rotacional del rotor solo, y la proyección de la fuerza gravitacional en la dirección en la que está actuando la fuerza centrífuga real. Esta proyección varía durante un ciclo rotacional del rotor. Por ejemplo, cuando el rotor está en una posición tal que la fuerza centrífuga actúa sobre el objeto de referencia en una dirección que apunta hacia la tierra, entonces la fuerza centrífuga efectiva medida es la suma del valor absoluto de la fuerza centrífuga real y el valor absoluto de la fuerza gravitacional que actúa sobre el objeto de referencia. Cuando, por otro lado, el rotor está en una posición tal que la fuerza centrífuga real está actuando sobre el objeto de referencia en una dirección que apunta alejándose de la tierra 180ºC entonces la fuerza centrífuga efectiva medida es el valor absoluto de la fuerza centrífuga real menos el valor absoluto de la fuerza gravitacional que actúa sobre el objeto de referencia. Entre estas dos fases de la rotación, el valor de la fuerza centrífuga medida está entre los dos valores descritos, que definen un valor máximo y un valor mínimo. Como consecuencia, la fuerza centrífuga efectiva medida oscila alrededor de la fuerza centrífuga real cuando el rotor está girando. Puesto que la dirección en la que actúa la fuerza gravitacional, que provoca estas oscilaciones, siempre apunta hacia la tierra, la rotación se mide con respecto a la tierra como marco de referencia global.
Debe observarse que la fuerza centrífuga que actúa sobre el objeto de referencia rotatorio no es una fuerza verdadera. La fuerza verdadera es la denominada fuerza centrípeta que actúa hacia el centro de la rotación y mantiene el objeto de referencia moviéndose en un círculo de un radio fijo. La fuerza centrífuga es una fuerza ficticia experimentada por el objeto de referencia en el sistema de coordenadas rotatorio. Esto es debido a la inercia del objeto de referencia y parece en el sistema de coordenadas rotatorio como si tirara del objeto de referencia alejándolo del centro de rotación. La fuerza (real) que contrarresta la fuerza centrífuga (ficticia), es decir, el efecto de inercia del objeto de referencia, para mantener el radio del círculo constante, es la fuerza centrípeta. Por tanto, si el radio del círculo se mantiene constante, la fuerza centrífuga tiene el mismo valor absoluto que la fuerza centrífuga (ficticia) y se orienta en el sentido opuesto. La medición de la fuerza centrífuga es por tanto, de hecho, una medición de la fuerza centrípeta que es necesaria para mantener el objeto de referencia sobre su círculo. Sin embargo, como la fuerza centrípeta medida difiere de la fuerza centrífuga sólo en su signo, la medición se seguirá denominando en lo sucesivo como medición de una fuerza centrífuga.
Cuando la velocidad de rotación se mide mediante el giroscopio de velocidad de guiñada, también se mide la velocidad del rotor con referencia a un marco de referencia global. En un giroscopio de velocidad de guiñada se usa un elemento giratorio. El eje de giro de un elemento giratorio no perturbado tiene, debido a la conservación de momento angular, una dirección fija en el espacio. La velocidad de rotación del rotor se mide mediante una...
Reivindicaciones:
1. Método para determinar al menos un parámetro de rotación (ωrotor) de un rotor (4) de turbina eólica que gira con una velocidad de rotación (ωrotor) y una fase (θrotor), que comprende las etapas de:
- medir una fuerza centrífuga efectiva (Fx) que actúa en una primera dirección predeterminada, que se define en un sistema de coordenadas que gira sincrónicamente con el rotor (4), sobre al menos un objeto (11) de referencia ubicado en o sobre el rotor (4),
- establecer una primera frecuencia angular (ωPLL) que representa la velocidad de rotación del rotor (4) basándose en variaciones en la fuerza centrífuga efectiva medida (Fx) debido a la fuerza gravitacional (Fg),
- establecer una segunda frecuencia angular (ωyrg) que representa la velocidad de rotación del rotor (4) mediante el uso de al menos un giroscopio (14) de velocidad de guiñada, y
- establecer el valor de la velocidad de rotación (ωrotor) como el parámetro rotacional corrigiendo la segunda frecuencia angular (ωyrg) comparándola con la primera frecuencia angular (ωPLL).
2. Método según la reivindicación 1, en el que
- se mide una fuerza efectiva (Fy) que actúa en una segunda dirección predeterminada, que se define en un sistema de coordenadas que gira sincrónicamente con el rotor (4) y que no es paralela a la primera dirección predeterminada, sobre al menos un objeto (11) de referencia ubicado en o sobre el rotor (4), y
- se establece la fase (θrotor) del rotor basándose en variaciones en las fuerzas efectivas medidas (Fx, Fy) que actúan en la primera y segunda dirección debido a la fuerza gravitacional (Fg).
3. Método según la reivindicación 2, en el que la segunda dirección predeterminada es perpendicular a la primera dirección predeterminada.
4. Método según cualquiera de las reivindicaciones anteriores, en el que el al menos un objeto (11) de referencia está ubicado en o sobre el buje (6) del rotor (4).
5. Método según cualquiera de las reivindicaciones anteriores, en el que
- se produce una señal eléctrica que representa la fuerza efectiva medida (Fx, Fy) para cada fuerza efectiva medida (Fx, Fy),
- se introduce la señal eléctrica en un bucle (12) de enganche de fase, y
- la primera frecuencia angular (ωPPL) y/o la fase (θrotor) del rotor está(n) establecida(s) por el bucle (12) de enganche de fase.
6. Turbina (1) eólica con un rotor (4) que incluye un buje (6) y al menos una pala (5) de rotor fijada al buje, en la que al menos un acelerómetro (10) y al menos un giroscopio (12) de velocidad de guiñada están ubicados en o sobre el rotor (4) y que comprende un medio (18) de procesamiento que está diseñado para establecer al menos una frecuencia angular (ωrotor) que representa la velocidad de rotación del rotor (4) basándose en salidas del al menos un acelerómetro (10) y el al menos un giroscopio (12) de velocidad de guiñada.
7. Turbina (1) eólica según la reivindicación 6, en la que el al menos un acelerómetro (10) y/o el al menos un giroscopio (14) de velocidad de guiñada está(n) ubicado(s) en o sobre el buje (6).
8. Turbina (1) eólica según la reivindicación 6 ó 7, en la que el al menos un acelerómetro (10) es un acelerómetro de doble eje.
9. Turbina eólica según cualquiera de las reivindicaciones 6 a 8, en la que el medio (18) de procesamiento comprende un bucle (12) de enganche de fase y una unidad (16) de autocalibración.
Patentes similares o relacionadas:
Dispositivo para determinar y/o ajustar la precisión de un tacógrafo, del 23 de Octubre de 2019, de Semmler GmbH Tacho Control: Un sistema de monitorización para la monitorización del desplazamiento de una torre de aerogenerador , dicho sistema de monitorización comprende: - una o […]
Dispositivo para la determinación del error de orientación de un sensor eólico, del 23 de Octubre de 2019, de Kintech Ingenieria, S.L: Dispositivo para la determinación del error de orientación de un sensor eólico respecto del Norte geográfico, que comprende: - una primera […]
Procedimiento de desmontaje para turbinas de gas y dispositivo de calibración, del 28 de Agosto de 2019, de LUFTHANSA TECHNIK AG: Método de desmontaje para turbinas de gas para reemplazar y/o inspeccionar y/o reparar componentes dispuestoS en una región de apoyo delantero de la turbina […]
Procedimiento para calibrar un codificador rotatorio, del 20 de Febrero de 2019, de BAUMULLER NURNBERG GMBH: Procedimiento para calibrar un codificador rotatorio de una máquina eléctrica diseñado como un transmisor incremental que emite una […]
Método para estimar la velocidad rotacional de una herramienta montada sobre un husillo rotativo de una máquina herramienta y tal máquina herramienta, del 25 de Mayo de 2016, de MARPOSS SOCIETA PER AZIONI: Método para estimar la velocidad rotacional de una herramienta montada en un husillo rotativo de una máquina herramienta usando un sistema […]
 Procedimiento para determinar al menos una velocidad en un vehículo sobre raíles, del 10 de Febrero de 2016, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para determinar al menos una velocidad en un vehículo sobre raíles , el cual está equipado con al menos una primera unidad de mecanismo de traslación […]
Procedimiento para determinar al menos una velocidad en un vehículo sobre raíles, del 10 de Febrero de 2016, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para determinar al menos una velocidad en un vehículo sobre raíles , el cual está equipado con al menos una primera unidad de mecanismo de traslación […]
 Anemómetro, del 12 de Marzo de 2014, de FERNSTEUERGERATE KURT OELSCH GMBH: Anemómetro para medir velocidades del viento, estando configurado el anemómetro como anemómetro de cazoletas o como anemómetro de molinete, que contiene:
a) […]
Anemómetro, del 12 de Marzo de 2014, de FERNSTEUERGERATE KURT OELSCH GMBH: Anemómetro para medir velocidades del viento, estando configurado el anemómetro como anemómetro de cazoletas o como anemómetro de molinete, que contiene:
a) […]
Sistema de calibrado de un sensor de movimiento dinámico y procedimiento para calibrar un sensor de movimiento dinámico, del 14 de Agosto de 2013, de THE MODAL SHOP, INC: Un sistema de calibrado del sensor de movimiento dinámico que comprende: una mesa ; un sensor de movimiento dinámico en ensayo (SUT), […]