SISTEMA Y PROCEDIMIENTO PARA SUPRIMIR PERTURBACIONES EN UN SISTEMA DE CONTROL DE REALIMENTACION.
Un sistema para suprimir perturbaciones de frecuencia variable para un sistema (3;
4) de control de realimentación, en el que dicho sistema es un circuito interno de realimentación en el sistema (3; 4) de control de realimentación que comprende un sistema real (G) conectado a un primer medio (B1(f''); B1(f*)) de filtración, que está conectado a un medio (3A; 4A) de estimación de frecuencia y a un medio (3B; 4B) de modelado del sistema, en el que dicho medio (3B; 4B) de modelado del sistema está conectado a un segundo medio (B2(f''); B2(f*)) de filtración mediante un medio (5) de resta,
caracterizado porque
dicho medio (3A; 4A) de estimación de frecuencia comprende un medio para estimar la frecuencia principal (f; f*) de una perturbación (d);
dicho primer medio (B1(f''); B1(f*)) de filtración está dispuesto para eliminar el contenido de frecuencia en una primera señal (y) de realimentación en torno a dicha frecuencia principal estimada (f; f*); dicho segundo medio (B2(f''); B2(f*)) de filtración está dispuesto para eliminar el contenido de frecuencia en una segunda señal (v) de realimentación en torno a dicha frecuencia principal estimada (f; f*);
dicho medio (3B; 4B) de modelado del sistema comprende un medio dispuesto para utilizar una segunda señal (S) de entrada procedente de dicho primer medio (B1(f''); B1(f*)) de filtración y dicha frecuencia principal estimada (f; f*) para modelar y compensar la pérdida de amortiguamiento y de fase de dicho sistema real (G); y
dicho medio (5) de resta está dispuesto para restar una primera señal de salida de dicho segundo medio (B2(f''); B2(f*)) de filtración de una segunda señal (S'') de salida procedente de dicho medio (3B; 4B) de modelado del sistema para obtener una señal estimada (d'') de perturbación sumada a una primera señal (u) de entrada de dicho circuito interno de realimentación
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07100599.
Solicitante: SAAB AB.
Nacionalidad solicitante: Suecia.
Dirección: ARENDEVAGEN 29A, 2TR.,175 54 JARFALLA.
Inventor/es: HELLBERG,DANIEL.
Fecha de Publicación: .
Fecha Solicitud PCT: 16 de Enero de 2007.
Fecha Concesión Europea: 28 de Abril de 2010.
Clasificación Internacional de Patentes:
- G05B5/01 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 5/00 Disposiciones para eliminar la inestabilidad. › eléctricas.
Clasificación PCT:
- G05B5/01 G05B 5/00 […] › eléctricas.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Sistema y procedimiento para suprimir perturbaciones en un sistema de control de realimentación.
Campo técnico
La presente invención versa acerca de un sistema y un procedimiento para suprimir las perturbaciones de banda estrecha de frecuencia variable en un sistema de control de realimentación como se define en el preámbulo de las reivindicaciones 1 y 10, respectivamente.
Antecedentes de la invención
Se puede introducir interferencia o ruido en los sistemas electrónicos de control de muchas formas distintas, por ejemplo, al tener componentes o sensores susceptibles a perturbaciones, tal como campos magnéticos variables, ruido de la red, un entorno poco firme y/o ruidoso, etc. Se han propuesto diversos procedimientos en la técnica anterior para estimar y aliviar tales interferencias.
Por ejemplo, según se conduce un carro de combate militar hacia un destino, existe la necesidad de estabilizar el tubo del cañón para poder, por ejemplo, disparar el cañón mientras el vehículo está en movimiento. Hay muchas cosas que afectan la elevación y la dirección del tubo del cañón mientras el carro de combate está en movimiento, tal como la aceleración o el uso de los frenos del carro de combate, el terreno circundante, la condición de la superficie carretera o de la superficie no pavimentada, etc.
Por lo tanto, para aliviar los efectos de tales factores, se puede utilizar un sistema de control de realimentación, por ejemplo un servomecanismo, para controlar y estabilizar el tubo del cañón.
Sin embargo, aparte de los factores mencionados, otro factor que también afecta a la estabilidad de la elevación y de la dirección del tubo del cañón es la vibración y el golpeteo de los eslabones interconectados de las bandas de rodadura del carro de combate. Las bandas de rodadura consisten en eslabones metálicos interconectados que giran en torno a ruedas motrices, en las que los eslabones metálicos interconectados se hunden en el terreno y empujan al carro de combate hacia delante. Dependiendo principalmente de la velocidad del carro de combate, los eslabones interconectados provocarán que se introduzca una perturbación de banda estrecha de frecuencia variable dentro del servomecanismo. Esta perturbación de banda estrecha de frecuencia variable provocará problemas en los servomecanismos conforme a la técnica anterior.
La razón de esto es que la perturbación de banda estrecha de frecuencia variable está ubicada en frecuencias que superan el ancho de banda del sistema de control de realimentación, es decir, el servomecanismo. Por lo tanto, es difícil diseñar el sistema de control de realimentación de forma que trabaje de forma satisfactoria en términos de todos los parámetros de diseño del sistema, es decir, rendimiento, estabilidad, robustez y precisión, etc., en el espectro completo de frecuencia de interés.
Así que, dependiendo de las características de las interferencias y de cómo se introduzcan en el sistema de control electrónico, existen situaciones, como se ha descrito anteriormente, en las que ninguna de las soluciones de la técnica anterior puede eliminar o suprimir, de forma satisfactoria, estas perturbaciones.
En el artículo "Rejection of disturbances with a large sinusoidal component of unknown frequency" de Bodson M et al, PROCEEDINGS OF THE SPIE, vol. 2715, 1996, páginas 64-75, XP002402299, ISSN: 0277-786X, se describe un algoritmo adaptable para una atenuación de perturbación periódica utilizando el concepto de un circuito de sincronización de fase. El algoritmo adaptable demuestra la capacidad para rechazar perturbaciones senoidales de frecuencia desconocida, y para seguir señales con una magnitud y frecuencia que varían lentamente.
En el artículo "A comparison of two adaptive algorithms for the control of active engine mounts" de Hillis A J et al, JOURNAL OF SOUND AND VIBRATION, vol. 286, 2005, nº 1-2, páginas 37+54, XP004939198, ISSN: 0022-460X, se comparan dos algoritmos para controlar bancadas activas de motor de automóviles. Uno es un algoritmo de mínimo cuadrado medio filtrado-x (FXLMS) de filtro adaptable y el otro es una implementación de síntesis mínima de controlador basada en errores (Er-MCSI) de controlador adaptable.
En el artículo "Frequency adaptive control technique for rejecting periodic run-out" de Jieng-Jang Lit et al, CONTROL ENGINEERING PRACTICE, PERGAMON PRESS, vol. 12, 2004, nº, páginas 31-40, XP002402300, ISSN: 0967-0661, se describe un controlador adaptable para eliminar la desviación periódica de un sistema que sigue una pista en la unidad de disco compacto (CDD) con doble accionador. El controlador adaptable intenta atenuar de forma adaptable los contenidos específicos de frecuencia de las perturbaciones de desviación sin amplificar sus armónicos de reposo.
En el artículo "Active vibration control in palletised workholding system for milling" de Rashid Amir et al, INTERNATIONAL JOURNAL OF MACHINE TOOL DESIGN AND RESEARCH, PERGAMON PRESS, vol. 46, 2006, nº 12-13, páginas 1626-1636, XP005585850, ISSN: 0890-6955, se marca como objetivo un sistema de fijación de la pieza para el control de vibración no deseada. El sistema de control activo está basado en un algoritmo adaptable de filtración, el X-LMS filtrado, y emplea piezoaccionadores para una fuerza de control dinámico.
Objetivo de la invención
Es un objetivo de la presente invención proporcionar un sistema estable y robusto y un procedimiento para suprimir perturbaciones de banda estrecha de frecuencia variable en un sistema de control de realimentación con un rendimiento y una precisión mejorados.
Resumen de la invención
El objetivo de la presente invención se consigue por medio de un sistema para suprimir perturbaciones de frecuencia variable en un sistema de control de realimentación, en el que el sistema es un circuito interno de realimentación en el sistema de control de realimentación que comprende un sistema real conectado a un primer medio de filtración, que está conectado a un medio de estimación de frecuencia y un medio de modelado del sistema, en el que dicho medio de modelado del sistema está conectado a un segundo medio de filtración por medio de un medio de resta, caracterizado porque el medio de estimación de frecuencia comprende un medio para estimar la frecuencia principal de una perturbación, el primer medio de filtración elimina el contenido de frecuencia en una primera señal de realimentación en torno a la frecuencia principal estimada, el segundo medio de filtración elimina el contenido de frecuencia en una segunda señal de realimentación en torno a la frecuencia principal estimada, el medio de modelado del sistema comprende un medio dispuesto para utilizar una segunda señal de entrada procedente del primer medio de filtración y la frecuencia principal estimada para modelar y compensar la pérdida de amortiguamiento y de fase del sistema real, y el medio de resta está dispuesto para restar una primera señal de salida procedente del segundo medio de filtración de una segunda señal de salida procedente del medio de modelado del sistema para obtener una señal estimada de perturbación añadida a la primera señal de entrada del circuito interno de realimentación.
El objetivo de la presente invención se logra adicionalmente por medio de un procedimiento para suprimir las perturbaciones de frecuencia variable en un sistema como se ha descrito anteriormente, caracterizado porque comprende las etapas de estimar la frecuencia principal de dicha perturbación, filtrar el contenido de frecuencia en una primera señal de realimentación y en una segunda señal de realimentación en torno a dicha frecuencia principal estimada, modelando y compensando la pérdida de amortiguamiento y de fase de dicho sistema real utilizando dicha frecuencia principal estimada y una segunda señal de entrada, produciendo una segunda señal de salida compensada de amortiguamiento y fase, produciendo una señal de perturbación estimada al restar una primera señal de salida de dicho segundo medio de filtración de dicha segunda señal de salida, y añadir dicha señal de perturbación estimada a la primera señal de entrada de dicho circuito interno de realimentación.
Una ventaja de la invención descrita anteriormente es que puede estimar perturbaciones de banda estrecha de frecuencia variable sin tener que modelar/diseñar el inverso de un sistema real. Esto es ventajoso dado que el diseño del inverso del sistema real, de forma que el modelo se corresponda bien respecto tanto a la ganancia sumada como al desfase de todas las frecuencias...
Reivindicaciones:
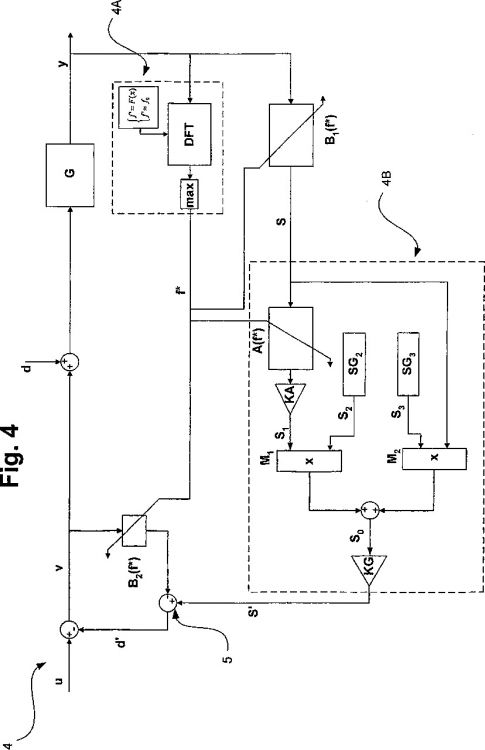
1. Un sistema para suprimir perturbaciones de frecuencia variable para un sistema (3; 4) de control de realimentación, en el que dicho sistema es un circuito interno de realimentación en el sistema (3; 4) de control de realimentación que comprende un sistema real (G) conectado a un primer medio (B1(f'); B1(f*)) de filtración, que está conectado a un medio (3A; 4A) de estimación de frecuencia y a un medio (3B; 4B) de modelado del sistema, en el que dicho medio (3B; 4B) de modelado del sistema está conectado a un segundo medio (B2(f'); B2(f*)) de filtración mediante un medio (5) de resta,
caracterizado porque
dicho medio (3A; 4A) de estimación de frecuencia comprende un medio para estimar la frecuencia principal (f; f*) de una perturbación (d);
dicho primer medio (B1(f'); B1(f*)) de filtración está dispuesto para eliminar el contenido de frecuencia en una primera señal (y) de realimentación en torno a dicha frecuencia principal estimada (f; f*); dicho segundo medio (B2(f'); B2(f*)) de filtración está dispuesto para eliminar el contenido de frecuencia en una segunda señal (v) de realimentación en torno a dicha frecuencia principal estimada (f; f*);
dicho medio (3B; 4B) de modelado del sistema comprende un medio dispuesto para utilizar una segunda señal (S) de entrada procedente de dicho primer medio (B1(f'); B1(f*)) de filtración y dicha frecuencia principal estimada (f; f*) para modelar y compensar la pérdida de amortiguamiento y de fase de dicho sistema real (G); y
dicho medio (5) de resta está dispuesto para restar una primera señal de salida de dicho segundo medio (B2(f'); B2(f*)) de filtración de una segunda señal (S') de salida procedente de dicho medio (3B; 4B) de modelado del sistema para obtener una señal estimada (d') de perturbación sumada a una primera señal (u) de entrada de dicho circuito interno de realimentación.
2. Un sistema conforme a la reivindicación 1, en el que dichos medios primero y segundo (B1(f'); B1(f*); B2(f'); B2(f*)) de filtración son filtros de paso de banda estrecha de frecuencia variable dispuestos para ser ajustados conforme a dicha frecuencia principal estimada (f; f*).
3. Un sistema conforme a cualquiera de las reivindicaciones 1 a 2, en el que dicho medio (3B; 4B) de modelado del sistema comprende
un tercer medio (A(f'); A(f*)) de filtración dispuesto para sumar un desfase de 90º a una segunda señal (S) de entrada en dicha frecuencia principal estimada (f'; f*);
un primer multiplicador (KA) de ganancia dispuesto para eliminar la ganancia sumada de dicho tercer medio (A(f'); A(f*)) de filtración;
generadores primero y segundo (SG2, SG3) de señales dispuestos para generar señales tercera y cuarta (S2, S3) de salida, respectivamente;
multiplicadores primero y segundo (M1, M2) dispuestos para multiplicar dicha tercera señal (S2) de salida de dicho primer generador (SG2) de señales con una quinta señal (S1) de salida de dicho primer multiplicador (KA) de ganancia y dicha cuarta señal (S3) de salida de dicho segundo generador (SG3) de señales con dicha segunda señal (S) de entrada, respectivamente;
un nodo sumador dispuesto para sumar las señales sexta y séptima de salida de dichos multiplicadores primero y segundo (M1, M2) y un segundo multiplicador (KG) de ganancia dispuesto para eliminar la ganancia sumada de dicho sistema real (G).
4. Un sistema conforme a la reivindicación 3, en el que dicho tercer medio (A(f'); A(f*)) de filtración es un filtro de paso bajo de frecuencia variable dispuesto para ser ajustado conforme a dicha frecuencia principal estimada (f'; f*).
5. Un sistema conforme a la reivindicación 3 o 4, en el que dichos generadores primero y segundo (SG2, SG3) de señales están dispuestos para generar señales tercera y cuarta (S2, S3) de salida con dependencia de una tabla T y en el que dicho segundo multiplicador está también dispuesto para sumar una ganancia con dependencia de dicha tabla (T), en el que dicha tabla (T) comprende el desfase y la ganancia sumada del sistema real (G) a distintas frecuencias.
6. Un sistema conforme a cualquiera de las reivindicaciones 1 a 5, en el que dicho medio (3A; 4A) de estimación de frecuencia comprende un medio de cálculo dispuesto para utilizar una función continua predeterminada (F(x)) de una variable medible (x) del sistema de dicho sistema real (G).
7. Un sistema conforme a cualquiera de las reivindicaciones 1 a 5, en el que dicho medio (3A; 4A) de estimación de frecuencia comprende un medio (DFT) de cálculo dispuesto para utilizar la transformada discreta de Fourier para calcular el espectro de frecuencia de dicha señal (y) de realimentación en un intervalo predeterminado (I) y
un medio de extracción (max) dispuesto para extraer la frecuencia que tiene el valor pico de energía máxima en dicho espectro de frecuencia y establecer dicha frecuencia extraída como la frecuencia principal estimada (f'; f*) de dicha perturbación (d).
8. Un sistema conforme a la reivindicación 7, en el que dicho intervalo predeterminado (I) se determina utilizando dicha función continua predeterminada (F(x)) de dicha variable medible (x) del sistema de dicho sistema real (G).
9. Un sistema conforme a cualquiera de las reivindicaciones 6 u 8, en el que dicha variable medible (x) del sistema de dicho sistema real (G) es la velocidad de las bandas de rodadura de un carro de combate militar.
10. Un procedimiento para suprimir las perturbaciones (d) de frecuencia variable en un sistema para suprimir las perturbaciones de frecuencia variable para un sistema (3; 4) de control de realimentación, en el que dicho sistema es un circuito interno de realimentación en el sistema (3; 4) de control de realimentación que comprende un sistema real (G) conectado con un primer medio (B1(f'); B1(f*)) de filtración, que está conectado a un medio (3A; 4A) de estimación de frecuencia y a un medio (3B; 4B) de modelado del sistema, en el que dicho medio (3B; 4B) de modelado del sistema está conectado a un segundo medio (B2(f'); B2(f*)) de filtración mediante un medio (5) de resta,
caracterizado porque
comprende las etapas de:
11. Un procedimiento conforme a la reivindicación 10, en el que la etapa de modelar y compensar la pérdida de amortiguamiento y de fase de dicho sistema real (G) utilizando dicha frecuencia principal estimada (f; f*) y la primera señal filtrada (y) de realimentación comprende adicionalmente las etapas de:
12. Un procedimiento conforme a la reivindicación 11, en el que la etapa de generar dichas señales tercera y cuarta (S2, S3) de salida procedentes de los generadores primero y segundo (SG2, SG3) de señales, respectivamente, y la etapa de eliminar la ganancia sumada de dicho sistema real (G) utilizando un segundo multiplicador (KG) de ganancia se llevan a cabo con dependencia de una tabla (T) que comprende el desfase y la ganancia sumada del sistema real (G) a distintas frecuencias.
13. Un procedimiento conforme a cualquiera de las reivindicaciones 10 a 12, en el que la etapa de estimar la frecuencia principal (f; f*) de dicha perturbación (d) comprende, además, la etapa de:
14. Un procedimiento conforme a cualquiera de las reivindicaciones 10 a 13, en el que la etapa de estimar la frecuencia principal (f; f*) de dicha perturbación (d) comprende, además, las etapas de:
15. Un procedimiento conforme a la reivindicación 14, en el que la etapa de estimar la frecuencia principal (f; f*) de dicha perturbación (d) comprende, además, la etapa de:
16. Un sistema (3; 4) de control de realimentación que comprende un sistema para suprimir las perturbaciones de frecuencia variable conforme a una cualquiera de las reivindicaciones 1-9.
17. Un sistema (3; 4) de control de realimentación conforme a la reivindicación 16, en el que dicho sistema (3; 4) de control de realimentación es un servomecanismo para controlar la elevación y la dirección del tubo del cañón en un carro de combate militar.
Patentes similares o relacionadas:
 MÉTODO PARA LA REDUCCIÓN DE LA VIBRACIÓN RESIDUAL GENERADA POR UNA SEÑAL DE EXCITACIÓN O CONTROL TRANSITORIA, EN SISTEMAS VIBRATORIOS CON CUALQUIER VALOR DE AMORTIGUAMIENTO, MEDIANTE EL AJUSTE DEL CONTENIDO FRECUENCIAL DE DICHA SEÑAL, del 1 de Febrero de 2013, de UNIVERSITAT POLITECNICA DE CATALUNYA: Método para la reducción de la vibración residual generada por una señal de excitación o control transitoria, en sistemas vibratorios con cualquier valor […]
MÉTODO PARA LA REDUCCIÓN DE LA VIBRACIÓN RESIDUAL GENERADA POR UNA SEÑAL DE EXCITACIÓN O CONTROL TRANSITORIA, EN SISTEMAS VIBRATORIOS CON CUALQUIER VALOR DE AMORTIGUAMIENTO, MEDIANTE EL AJUSTE DEL CONTENIDO FRECUENCIAL DE DICHA SEÑAL, del 1 de Febrero de 2013, de UNIVERSITAT POLITECNICA DE CATALUNYA: Método para la reducción de la vibración residual generada por una señal de excitación o control transitoria, en sistemas vibratorios con cualquier valor […]
PROCEDIMIENTO DE CONTROL DE UN MOTOR ELÉCTRICO DE UN VEHÍCULO HÍBRIDO O ELÉCTRICO, del 13 de Febrero de 2012, de PEUGEOT CITROEN AUTOMOBILES SA: Procedimiento de control de un motor eléctrico que mueve un árbol de transmisión (AP) de un vehículo automóvil, este motor aplica al árbol de transmisión (AP) un par […]
 METODO PARA LA REDUCCION DE LA VIBRACION RESIDUAL GENERADA POR UNA SEÑAL DE EXCITACION O CONTROL TRANSITORIA MEDIANTE EL AJUSTE DEL CONTENIDO FRECUENCIAL DE DICHA SEÑAL, del 26 de Abril de 2011, de UNIVERSITAT POLITECNICA DE CATALUNYA: Método para la reducción de la vibración residual generada por una señal de excitación o control transitoria mediante el ajuste del contenido frecuencial de dicha señal.La presente […]
METODO PARA LA REDUCCION DE LA VIBRACION RESIDUAL GENERADA POR UNA SEÑAL DE EXCITACION O CONTROL TRANSITORIA MEDIANTE EL AJUSTE DEL CONTENIDO FRECUENCIAL DE DICHA SEÑAL, del 26 de Abril de 2011, de UNIVERSITAT POLITECNICA DE CATALUNYA: Método para la reducción de la vibración residual generada por una señal de excitación o control transitoria mediante el ajuste del contenido frecuencial de dicha señal.La presente […]
PROCEDIMIENTO DE REGULACION., del 1 de Marzo de 2006, de BAYERISCHE MOTOREN WERKE AKTIENGESELLSCHAFT: Procedimiento para regular un accionamiento eléctrico, en el que se ajusta una magnitud de regulación (valor real) a un valor nominal, caracterizado por la serie repetitiva […]
PROCEDIMIENTO PARA LA DETERMINACION DE UNA APORTACION DE MAGNITUDES DE INTERFERENCIA., del , de SIEMENS AKTIENGESELLSCHAFT: LA INVENCION SE REFIERE A UN PROCEDIMIENTO PARA DETERMINAR UNA CONEXION ADICIONAL DE MAGNITUDES DE PERTURBACION (GK) EN UNA SALIDA DE REGULACION DE UN CIRCUITO REGULADOR […]
INSTALACION DE REGULACION., del 1 de Diciembre de 1997, de SIEMENS AKTIENGESELLSCHAFT: LA INVENCION SE REFIERE A UN EQUIPO DE REGULACION CON COMPONENTE DE CONTROL PID POR MEDIO DEL CUAL UN VALOR (U) DE SALIDA CONTROLADOR PUEDE SER OBTENIDO A PARTIR […]
REGULADOR DE POSICION ELECTRONEUMATICO., del 16 de Mayo de 1996, de SIEMENS AKTIENGESELLSCHAFT: LA DIFERENCIA DE REGULACION SE ENCUENTRA COORDINADA EN DOS ZONAS DE CONEXION Y CON ELLO CINCO ZONAS DISPUESTAS: UNA ZONA DE INSENSIBILIDAD (-A1, […]
 METODO DE REGULACION PARA LA AMORTIGUACION ACTIVA DE VIBRACIONES DE BAJA FRECUENCIA EN MAQUINAS HERRAMIENTAS CONTROLADAS NUMERICAMENTE, del 1 de Marzo de 2008, de DR. JOHANNES HEIDENHAIN GMBH: Una estructura de regulación para la amortiguación activa de vibraciones de baja frecuencia en máquinas-herramienta controladas numéricamente, con un regulador […]
METODO DE REGULACION PARA LA AMORTIGUACION ACTIVA DE VIBRACIONES DE BAJA FRECUENCIA EN MAQUINAS HERRAMIENTAS CONTROLADAS NUMERICAMENTE, del 1 de Marzo de 2008, de DR. JOHANNES HEIDENHAIN GMBH: Una estructura de regulación para la amortiguación activa de vibraciones de baja frecuencia en máquinas-herramienta controladas numéricamente, con un regulador […]