SISTEMA Y PROCEDIMIENTO DE EVALUACION DE IMAGENES.
Sistema de evaluación de imágenes para la evaluación de datos de la imagen,
que corresponden a una región de la imagen a supervisar, donde la región de la imagen a supervisar es dividida en zonas de la imagen (A, B, C) con diferente relevancia de alarma predeterminada, con:
con un dispositivo de evaluación (10) para la emisión de un mensaje de alarma en el caso de detección de una modificación de la posición de un objeto en la región de la imagen a supervisar, en el que el dispositivo de evaluación es adecuado para emitir el mensaje en función de la relevancia de la alarma de la zona de imagen del objeto antes de la modificación de la posición y de la relevancia de la alarma de la zona de imagen del objeto después de la modificación de la posición
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E00108866.
Solicitante: SEISMA AG.
Nacionalidad solicitante: Suiza.
Dirección: BAARER STRASSE 12,6300 ZUG.
Inventor/es: DORNIER, CLAUDIO.
Fecha de Publicación: .
Fecha Solicitud PCT: 11 de Agosto de 1995.
Fecha Concesión Europea: 28 de Abril de 2010.
Clasificación Internacional de Patentes:
- G01V8/10 FISICA. › G01 METROLOGIA; ENSAYOS. › G01V GEOFISICA; MEDIDA DE LA GRAVITACION; DETECCION DE MASAS U OBJETOS; MARCAS O ETIQUETAS DE IDENTIFICACION (medios para indicar dónde se encuentran personas sepultadas accidentalmente, p. ej. por la nieve A63B 29/02). › G01V 8/00 Prospección o detección por medios ópticos. › Detección, p. ej. utilizando barreras de luz (por reflexión a partir de un objeto G01S 17/00).
- G06T7/20C
- G06T7/20D
- G08B13/194C
Clasificación PCT:
- G01V8/10 G01V 8/00 […] › Detección, p. ej. utilizando barreras de luz (por reflexión a partir de un objeto G01S 17/00).
- G06T7/20 G […] › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › G06T 7/00 Análisis de imagen. › Análisis del movimiento (estimación del movimiento para codificación, decodificación, compresión o descompresión de señales de vídeo digitales H04N 19/43, H04N 19/51).
Clasificación antigua:
- G06T7/20 G06T 7/00 […] › Análisis del movimiento (estimación del movimiento para codificación, decodificación, compresión o descompresión de señales de vídeo digitales H04N 19/43, H04N 19/51).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Lituania, Letonia.
Fragmento de la descripción:
Sistema y procedimiento de evaluación de imágenes.
La invención se refiere a un sistema y a un procedimiento para la evaluación de imágenes de acuerdo con la solicitud de patente P 44 07 528.6, que ha sido publicada posteriormente el 21.09.95.
De acuerdo con el estado de la técnica mencionado en la solicitud de patente indicada anteriormente, como se publica por ejemplo en el documento DE-PS 36 28 816, una señal de vídeo suministrada por un sensor de vídeo es muestreada y un número predeterminado de valores de muestreo, que corresponden a un campo parcial de la imagen de vídeo, es agrupado como valor de suma y a continuación es memorizado.
Por medio de la comparación de los valores de suma de los campos parciales de una imagen de vídeo actual con los de una imagen de vídeo precedente, memorizada, se puede constatar una modificación del contenido de la imagen en virtud de un movimiento dentro de la sección de la imagen.
Para la evaluación de una modificación de la imagen determinada se someten los campos parciales que se han modificado a una verificación sobre determinados criterios de relevancia para alarma. En el caso de cumplimiento de criterios predeterminados, como por ejemplo el exceso de un tamaño mínimo determinado de un objeto (por ejemplo, 6 campos parciales relacionados) se dispara una alarma.
Además, también se pueden preprogramar los llamados campos de referencia, que por sí mismos no disparan ninguna alarma, pero que, en el caso de una modificación relevante de alarma del contenido de su imagen, pueden desplazar el sistema a un plano más elevado del campo de alarma o bien activar otros llamados campos de alarma. En este caso, a los diferentes campos de alarma pueden ser asignados diferentes planos de campos de alarma, conduciendo solamente a un disparo de la alarma los campos de alarma que están asociados al plano predominante del campo de alarma.
Por consiguiente, debe aparecer en primer lugar una modificación de la imagen en un campo de referencia (zona de prealarma), antes de que una modificación relevante de alarma en un campo de alarma de un plano elevado del campo de alarma conduzca a un disparo de una alarma. Los campos de referencia sirven por lo tanto, solamente como campos de conmutación o para el enlace lógico.
La figura 1 muestra un retículo simplificado de campos parciales que consta de 18 campos parciales, en el que la columna de la derecha consta de seis campos de referencia R que, en el caso de que se produzca una modificación relevante de alarma, conducen a una conmutación a un segundo plano del campo de alarma, y las columnas de la izquierda y del centro constan de seis campos de alarma A, respectivamente, a los que está asociado el segundo plano del campo de alarma.
Si una modificación de la imagen relevante de alarma se mueve en la dirección R2, entonces se activa en primer lugar el campo de referencia R, con lo que se realiza una conmutación al segundo plano del campo de alarma y con ello una activación de los campos de alarma A. Una modificación siguiente relevante de alarma dentro de los campos A conduce, por lo tanto, a un disparo de la alarma.
Un movimiento de una modificación relevante de alarma en la dirección R, en cambio, no conduce, cuando se alcanzan los campos de alarma A, a ningún disparo de la alarma, puesto que en el estado de partida reina el primer plano del campo de alarma.
Por medio de una estructura de este tipo es posible, por lo tanto, un disparo de la alarma dependiente de la secuencia de zonas de la modificación de la imagen.
La región de campos de referencia mostrada en la figura 1 puede cubrir, por ejemplo, la región de una valla y la región de campos de alarma pueden cubrir un terreno a proteger.
Un intruso, que se aproxima, por ejemplo, desde una posición fuera del terreno a proteger, es decir, en la dirección R2, hacia la región del campo de alarma, pasa en primer lugar la región del campo de referencia y de esta manera activa los campos de alarma. Tan pronto como pasa a continuación por la región del campo de alarma, se dispara la alarma.
En cambio, un vigilante, que se mueve exclusivamente dentro del terreno a proteger y, por lo tanto, no se mueve en la región del campo de referencia, no conduce a una activación de los campos de alarma A. Una modificación provocada por él en la región del campo de alarma no conduce, por lo tanto, a ningún disparo de la alarma.
No obstante, esto solamente es válido cuando con anterioridad no se ha producido ninguna modificación relevante de la imagen en la región del campo de referencia.
En el caso de una evaluación de este tipo, la determinación de una relación local o temporal de una modificación de la imagen es puramente casual, puesto que no es posible una coordinación de las modificaciones de la imagen. Por ejemplo, una modificación de la imagen condicionada por el tiempo atmosférico, que es provocada, por ejemplo, por bamboleo de postes, remolinos de hojas o formación de sombras proyectadas, puede conducir a una activación permanente de los campos de referencia, con lo que el sistema de evaluación de la imagen se desplaza continuamente al segundo plano del campo de alarma y de esta manera se activan los campos de alarma A.
Una modificación de la imagen provocada por el vigilante conduciría en este caso a un disparo de la alarma.
Por lo demás, una modificación de la imagen condicionada por el tiempo atmosférico, que se produce en un campo de alarma del segundo plano del campo de alarma, que no está en relación con una modificación de la imagen realmente relevante de alarma, que se produce con anterioridad en un campo de referencia, puede conducir a un disparo de la alarma.
Por lo tanto, en los procedimientos y sistemas convencionales para la evaluación de la imagen, una evaluación, dependiente de las zonas, de las modificaciones de la imagen es con frecuencia errónea y, por lo tanto, poco fiable.
La publicación US 4 249 207 describe un sistema y un procedimiento para la evaluación de la imagen, en los que una región de supervisión predeterminada es dividida en una pluralidad de células y es supervisada la modificación de una señal de vídeo integrada de cada célula. Como criterio para un disparo de la alarma se evalúa el número de células vecinas que se modifican en una dirección determinada. Por lo tanto, se emite una alarga cuando una persona detectada recorre más que una distancia previamente establecida sobre la imagen de vídeo en una dirección.
Por lo tanto, la invención tiene el cometido de crear un sistema y un procedimiento para la evaluación de imágenes, por medio de los cuales se posibilita una evaluación fiable dependiente de las zonas.
Este cometido se soluciona de acuerdo con la invención por medio de un sistema de evaluación de imágenes de acuerdo con la reivindicación 1 de la patente.
Además, este cometido se soluciona por medio de un procedimiento para la evaluación de imágenes de acuerdo con la reivindicación 19.
Por medio de la evaluación, relacionada con el objeto, de los cambios de zona y de la relevancia de alarma de las zonas respectivas de la imagen se puede elevar considerablemente la fiabilidad de la evaluación de la imagen.
Otras configuraciones de la invención se indican en las reivindicaciones dependientes.
La invención se describe en detalle a continuación con la ayuda de un ejemplo de realización con referencia al dibujo. En este caso:
La figura 1 muestra un retículo de campos parciales de un sistema convencional para la evaluación de las imágenes.
La figura 2 muestra un diagrama de bloques de un sistema para la evaluación de la imagen de acuerdo con un ejemplo de realización.
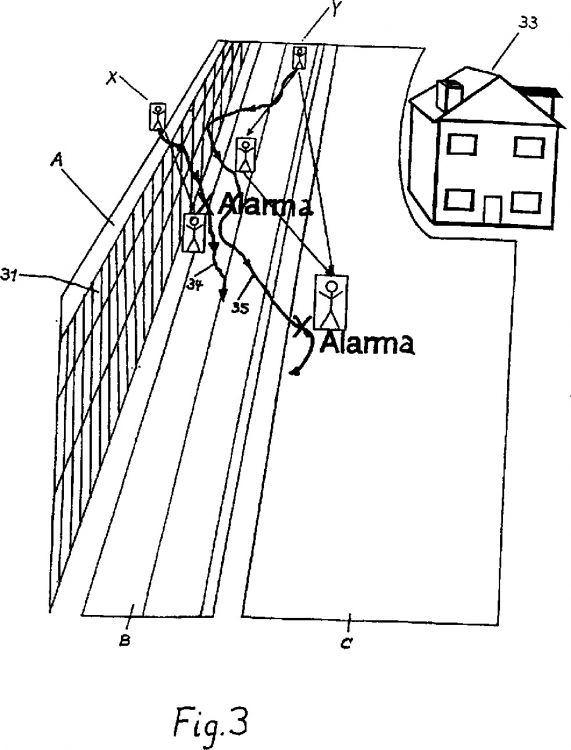
La figura 3 muestra una sección de la imagen de supervisión del sistema para la evaluación de imágenes de acuerdo con el ejemplo de realización.
El diagrama de bloques representado en la figura 2 muestra un ejemplo de realización de un sistema para la evaluación de imágenes.
La señal de vídeo suministrada por una cámara 1 es digitalizada por medio de un convertidor analógico/digital. La cámara 1 puede ser una cámara usual de supervisión de vídeo, pero también una cámara de infrarrojos o una cámara de vídeo térmica para la generación de la señal de vídeo. Los datos de puntos de imagen digitalizados se pueden agrupar opcionalmente para la reducción de la cantidad de datos...
Reivindicaciones:
1. Sistema de evaluación de imágenes para la evaluación de datos de la imagen, que corresponden a una región de la imagen a supervisar, donde la región de la imagen a supervisar es dividida en zonas de la imagen (A, B, C) con diferente relevancia de alarma predeterminada, con:
2. Sistema de evaluación de imágenes de acuerdo con la reivindicación 1, caracterizado, además, por una memoria de imágenes de referencia para la memorización de los datos de una imagen como datos de la imagen de referencia y con una instalación de generación de la imagen diferencial para la comparación de datos actuales de la imagen con datos de la imagen de referencia y para la generación de una imagen diferencial, en la que están marcados puntos de la imagen, cuyos datos de la imagen han sido modificados.
3. Sistema de evaluación de imágenes de acuerdo con la reivindicación 2, caracterizado, además, por una instalación de extracción de objetos (8) para la agrupación de puntos de la imagen marcados coherentes en objetos y la creación de una lista de objetos con los datos de objetos que describen los objetos extraídos.
4. Sistema de acuerdo con una de las reivindicaciones 1 a 3, caracterizado por un dispositivo de entrada (25) por medio del cual se pueden predeterminar las zonas de la imagen (A, B, C).
5. Sistema de acuerdo con la reivindicación 4, caracterizado porque las zonas de la imagen (A, B, C) pueden ser definidas con la ayuda de un polígono que circunscribe la zona de la imagen correspondiente, donde por medio del dispositivo de entrada (25) se pueden introducir las coordenadas del polígono.
6. Sistema de acuerdo con una de las reivindicaciones anteriores, caracterizado porque las zonas de la imagen A, B, C) comprenden una zona de detección (A), una zona de alarma (B), y una zona de prioridad (C).
7. Sistema de acuerdo con la reivindicación 6, caracterizado porque para la elevación de la capacidad de detección en el caso de una representación de la región de la imagen a detectar en un dispositivo de representación (14), la zona de detección (A) se puede representar de color verde, la zona de alarma (B) se puede representar de color amarillo y la zona de prioridad (C) se puede representar de color rojo.
8. Sistema de acuerdo con la reivindicación 6, caracterizado porque el dispositivo de evaluación (10) no emite ningún mensaje de alarma en el caso de una modificación de la posición del objeto dentro de la zona de detección (A).
9. Sistema de acuerdo con la reivindicación 6, caracterizado porque el dispositivo de evaluación (10) emite un mensaje de alarma en el caso de una modificación de la posición del objeto desde la zona de detección (A) a la zona de alarma (B).
10. Sistema de acuerdo con la reivindicación 6, caracterizado porque el dispositivo de evaluación (10) emite un mensaje de alarma en el caso de una modificación de la posición del objeto en la zona de prioridad (C).
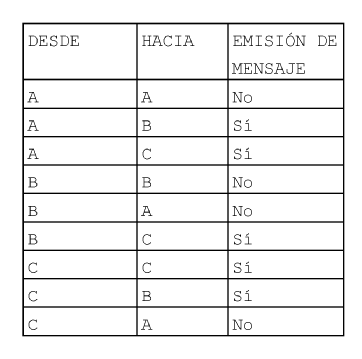
11. Sistema de acuerdo con la reivindicación 6, caracterizado porque el dispositivo de evaluación (10), en el caso de emisión del mensaje de alarma, tiene en cuenta la modificación de la posición del objeto con relación a las diferentes zonas de la imagen (A, B, C) de acuerdo con la Tabla siguiente, donde A designa la zona de detección, B designa la zona de alarma y C designa la zona de prioridad.
12. Sistema de acuerdo con una de las reivindicaciones 8 a 11, caracterizado porque la emisión del mensaje de alarma a través del dispositivo de evaluación (10) solamente tiene lugar cuando se cumplen también todos los demás criterios relevantes.
13. Sistema de acuerdo con una de las reivindicaciones 8 a 12, caracterizado porque el dispositivo de evaluación (10) determina un cambio múltiple de las zonas de la imagen con la ayuda de las coordenadas del primer punto de detección memorizadas en una lista de objetos.
14. Sistema de acuerdo con la reivindicación 13, caracterizado porque el dispositivo de evaluación (10) no emite ningún mensaje de alarma en el caso de una modificación de la posición del objeto desde la zona de detección (A) a la zona de alarma (B) cuando las coordenadas del primer punto de detección del objeto se encuentran en la zona de alarma (B).
15. Sistema de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el dispositivo de evaluación (10) comprende una unidad de verificación (13) del objeto de alarma, en la que están memorizadas las coordenadas de las zonas de la imagen (A, B, C) predeterminadas, calculando la unidad de verificación (13) del objeto de alarma la modificación de la posición del objeto con la ayuda de las coordenadas del objeto de un extractor de objetos (8) a partir de la imagen diferencial del objeto extraído y de las coordenadas memorizadas de un objeto memorizado asociado en un correlacionador de objetos (9).
16. Sistema de acuerdo con una de las reivindicaciones anteriores, caracterizado porque la instalación de evaluación (10) emite un mensaje en el caso de características relevantes predeterminadas de los datos modificados de la imagen, en el que la instalación de evaluación (10) está preajustada de tal forma que el tamaño del objeto utilizado para la relevancia, en el caso de objetos que se encuentran en secciones preajustadas de la imagen, es evaluado sin tener en consideración la modificación del tamaño en perspectiva.
17. Sistema de acuerdo con una de las reivindicaciones anteriores, caracterizado porque comprende una instalación de evaluación previa (22), que modifica la programación de un dispositivo de evaluación (10) utilizado para la emisión del mensaje en el caso de características relevantes predeterminadas de los datos modificados de la imagen en función de características predeterminadas, en función de las condiciones del medio ambiente en la zona de la imagen.
18. Sistema de acuerdo con una de las reivindicaciones anteriores, caracterizado por
19. Procedimiento para la evaluación de datos de imágenes que corresponden a una zona de la imagen a supervisar y divididos en zonas de la imagen (A, B, C) con diferente relevancia de alarma predeterminada, con la etapa:
20. Procedimiento de acuerdo con la reivindicación 16, caracterizado por las otras etapas:
21. Procedimiento de acuerdo con la reivindicación 20, caracterizado por la otra etapa de la agrupación de puntos de la imagen marcados coherentes en objetos y la creación de una lista de objetos con los datos de objetos que describen los objetos extraídos.
22. Procedimiento de acuerdo con la reivindicación 21, caracterizado por la otra etapa de la asociación de nuevos objetos desde los datos actuales de la imagen a los objetos memorizados correspondientes.
Patentes similares o relacionadas:
Procedimiento y equipo para la identificación de cavidades en un terreno, del 11 de Diciembre de 2019, de UNIVERSIDAD DE JAEN: Procedimiento para la identificación y caracterización de cavidades, oquedades o cuevas en un terreno mediante un mapa de probabilidad, donde la resolución del resultado […]
Borde de seguridad y método asociado, del 31 de Julio de 2019, de Dalmatic Lystrup A/S: Una barrera de seguridad que comprende un transmisor y un receptor conectado al transmisor a través de un trayecto de respuesta, el transmisor comprende: […]
Dispositivo de detección y/o de vigilancia de objetos ópticamente invisibles, del 15 de Abril de 2019, de SOCIETE PLYMOUTH FRANCAISE: Dispositivo de detección y/o de vigilancia de objetos ópticamente invisibles, como canalizaciones enterradas, sistemas de advertencia o cuerpos enterrados en un suelo o incrustados […]
Detección de proximidad en robots móviles, del 1 de Noviembre de 2017, de IROBOT CORPORATION: Un robot autónomo que comprende: un cuerpo del robot que define una dirección motriz de avance (F); un sistema motriz que […]
Dispositivo portátil inteligente para la inspección de los bajos de los vehículos, del 31 de Marzo de 2017, de CHULIÁN DIAZ, Sergio: 1. Dispositivo portátil inteligente para la inspección de los bajos de los vehículos, constituido por un chasis metálico que comprende […]
Unidad de exhibición de mercancías en multiestantes y método para monitorizar los niveles de existencias en tal unidad, del 11 de Mayo de 2016, de Elstat Limited: Una unidad de exhibición de mercancías en multiestantes que incluye una pluralidad de sensores montados en una pared de la unidad y opuestos a una fuente de iluminación […]
 Dispensador automatizado con disposición de sensores, del 16 de Octubre de 2013, de SCA HYGIENE PRODUCTS AB: Un dispensador para el dispensado automáticamente de un producto almacenado en una provisión delproducto de dicho dispensador , comprendiendo […]
Dispensador automatizado con disposición de sensores, del 16 de Octubre de 2013, de SCA HYGIENE PRODUCTS AB: Un dispensador para el dispensado automáticamente de un producto almacenado en una provisión delproducto de dicho dispensador , comprendiendo […]
Método para determinar electrónicamente la posición de impacto en un blanco de tiro, del 30 de Septiembre de 2013, de SIUS AG: Procedimiento para determinar electrónicamente la posición de impacto en un blanco de tiro, en el que sedetermina de forma exclusivamente optoelectrónica la posición de […]