HERRAMIENTA DE SUJECION COMPRENDIENDO UN SISTEMA DE COMPENSACION AUTONOMO.
Herramienta de sujeción comprendiendo un primer elemento (18) y un segundo elemento (20) capaces de un desplazamiento relativo bajo la acción de un dispositivo de arrastre,
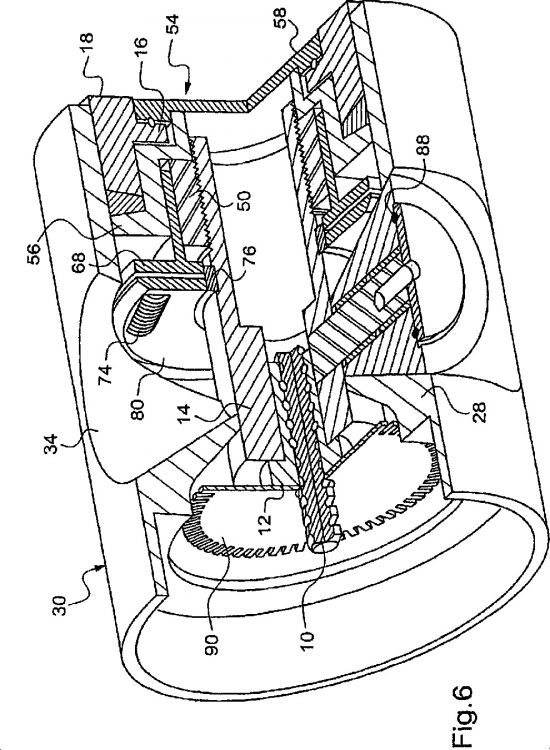
comprendiendo este dispositivo un tornillo (10) de un paso dado (P1) apropiado para ser arrastrado en rotación alrededor de un eje (XX), en un sentido o en un sentido opuesto bajo la acción de un motor (M), una tuerca (12) cooperando con el tornillo (10) y apropiada para ser arrastrada en traslación en la dirección del eje (XX) del tornillo, siendo dicha tuerca solidaria en traslación del primer elemento (18), de los primeros medios de guiado (34L) definiendo un guiado lineal paralelo al eje (XX) del tornillo (10) para bloquear la rotación de la tuerca (12) en una primera fase de desplazamiento (D1) de la tuerca y de los segundos medios de guía (34H) definiendo una guía helicoidal que se extiende según el eje (XX) del tornillo (10) y que tiene un paso (P2) invertido respecto al paso (P1) del tornillo para permitir la rotación de la tuerca (12), en el mismo sentido de rotación que el tornillo (10) en una segunda fase de desplazamiento (D2) de la tuerca, así como un sistema de compensación (46) interpuesto entre el primer elemento (18) y un soporte móvil (14) solidario de la tuerca (12) para reiniciar la posición de este primer elemento (18) respecto al segundo elemento (20), de manera que la primera y segunda fase de desplazamiento engendradas por el primer y segundo medio de guiado (34L y 34H) permanezcan sincrónicas con las fases necesarias para una optimización del desplazamiento del primer elemento, caracterizada porque el sistema de compensación comprende un disco de reajuste (68) solidario en rotación de un buje (50) atornillado alrededor del soporte móvil (14), un disco de medición (80) montado sobre el soporte móvil (14) por medio de un mecanismo con rueda libre (76) y al menos un resorte (74) de almacenamiento de energía interpuesto entre el disco de reajuste (68) y el disco de medición (80), de modo que la memorización del estado de desgaste de las piezas se concretice por la posición angular relativa del disco de medición (80) y del soporte móvil (14) y porque durante la segunda fase de desplazamiento (D2) de la tuerca (12), la necesidad de efectuar un reajuste de desgaste se muestra por el topamiento del disco de medición (80) sobre el elemento móvil (18), arrastrado entonces el disco de reajuste (68) en rotación por el buje (50) comprimiendo el(los) resorte(s) (74) hasta el final del movimiento del soporte móvil (14)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2006/002454.
Solicitante: SALESSE, CHRISTIAN
LORIOT, JEAN-MARC.
Nacionalidad solicitante: Francia.
Dirección: 10, RUE DU PILAT,07100 ANNONAY.
Inventor/es: SALESSE, CHRISTIAN, LORIOT, JEAN-MARC.
Fecha de Publicación: .
Fecha Concesión Europea: 28 de Abril de 2010.
Clasificación PCT:
- B23K11/31 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23K SOLDADURA SIN FUSION O DESOLDEO; SOLDADURA; REVESTIMIENTO O CHAPADO POR SOLDADURA O SOLDADURA SIN FUSION; CORTE POR CALENTAMIENTO LOCALIZADO, p. ej. CORTE CON SOPLETE; TRABAJO POR RAYOS LASER (fabricación de productos revestidos de metal por extrusión de metales B21C 23/22; realización de guarniciones o recubrimientos por moldeo B22D 19/08; moldeo por inmersión B22D 23/04; fabricación de capas compuestas por sinterización de polvos metálicos B22F 7/00; disposiciones sobre las máquinas para copiar o controlar B23Q; recubrimiento de metales o recubrimiento de materiales con metales, no previsto en otro lugar C23C; quemadores F23D). › B23K 11/00 Soldadura por resistencia; Seccionamiento por calentamiento por resistencia. › Portaelectrodos (no limitados a la soldadura por resistencia eléctrica o al seccionamiento por calentamiento por resistencia B23K 37/02).
- B25B5/10 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25B HERRAMIENTAS O UTILLAJE DE BANCO NO PREVISTOS EN OTRO LUGAR, PARA FIJAR, UNIR, DESENGANCHAR O MANTENER. › B25B 5/00 Prensas o gatillos (para mantener o posicionar las piezas a soldar, soldar sin fusión o cortar por calentamiento localizado B23K 37/04; medios de fijación de las piezas destinadas a ser montadas sobre una mesa, un carro portaherramientas u órganos análogos B23Q 3/06). › mediante la utilización de tornillos.
Fragmento de la descripción:
Herramienta de sujeción comprendiendo un sistema de compensación autónomo.
La invención se refiere a una herramienta de sujeción comprendiendo un sistema de compensación apropiado para efectuar el reinicio de la posición de piezas de contacto con el fin de efectuar principalmente un reajuste de su desgaste.
En las patentes FR2822401 y WO02/076665A, los solicitantes han descrito una herramienta de sujeción que consiste en un accionador de ganancia mecánica variable.
Esta herramienta de sujeción comprende un primer elemento y un segundo elemento capaces de un desplazamiento relativo bajo la acción de un dispositivo de arrastre, comprendiendo este dispositivo un tornillo de un paso dado apropiado para ser arrastrado en rotación alrededor de un eje, en un sentido o en un sentido opuesto bajo la acción de un motor, una tuerca cooperando con el tornillo y apropiada para ser arrastrada en traslación en la dirección del eje del tornillo, siendo dicha tuerca solidaria del primer elemento, de los primeros medios de guiado definiendo un guiado lineal paralelo al eje del tornillo para bloquear la rotación de la tuerca en una primera fase de desplazamiento de la tuerca y de los segundos medios de guiado definiendo un guiado helicoidal que se extiende según el eje del tornillo y que tiene un paso invertido respecto al paso del tornillo para permitir la rotación de la tuerca en el mismo sentido de rotación que el tornillo en una segunda fase de desplazamiento de la tuerca.
Este dispositivo de arrastre presenta una relación cinemática variable con una primera fase de desplazamiento en la que la tuerca está bloqueada en rotación y una segunda fase de desplazamiento en la que la tuerca es arrastrada en rotación en el mismo sentido que el tornillo, lo que permite entonces disminuir el paso aparente del tornillo y por lo tanto la velocidad en traslación de la tuerca, en esta segunda fase de desplazamiento. Suponiendo que el tornillo gira a una velocidad angular constante, la velocidad en traslación (velocidad lineal) de la tuerca será más rápida en la primera fase de desplazamiento y disminuirá hasta volverse eventualmente nula en esta segunda fase de desplazamiento.
En la solicitud PCT/FR05/00306, los solicitantes han descrito un perfeccionamiento para la herramienta de sujeción del tipo anterior que reside en un sistema de compensación interpuesto entre el primer elemento y un soporte móvil solidario de la tuerca para reiniciar la posición de este primer elemento respecto al segundo elemento, de manera que la primera y segunda fase de desplazamiento engendradas por el primero y segundo medio de guiado permanezcan sincrónicas con las fases necesarias para una optimización del desplazamiento del primer elemento.
Este sistema de compensación permite así reiniciar o calibrar periódicamente la posición del primer elemento respecto a la de la tuerca y en particular la posición de dicho primer elemento cuando la tuerca deja los primeros medios de guiado definiendo un guiado lineal para abordar los segundos medios de guiado definiendo un guiado helicoidal. Así, cuando la tuerca está provista de elementos de seguimiento, tales como unos rodillos, esto permite reiniciar la posición del primer elemento cuando los rodillos dejan el guiado lineal para abordar el guiado helicoidal.
La herramienta de sujeción según la técnica anterior mencionada anteriormente puede realizarse principalmente en forma de una pinza, por ejemplo de una pinza para soldar o incluso un sistema de frenado con disco.
La invención pretende perfeccionar una herramienta de sujeción conocida como esta.
Pretende principalmente perfeccionar el sistema de compensación descrito en la solicitud PCT/FR05/00306 que presenta el inconveniente de que no puede compensar un desfase ocurrido, en el tiempo, entre el primer y segundo elemento (especialmente cuando estos elementos son unos electrodos que se desgastan progresivamente), sin la añadidura de un segundo sistema de accionador.
La invención tiene por objeto por lo tanto una herramienta de sujeción comprendiendo un primer elemento y un segundo elemento capaces de un desplazamiento relativo bajo la acción de un dispositivo de arrastre, comprendiendo este dispositivo un tornillo de un paso dado apropiado para ser arrastrado en rotación alrededor de un eje, en un sentido o en un sentido opuesto bajo la acción de un motor, cooperando una tuerca con el tornillo y apropiada para ser arrastrada en traslación en la dirección del eje del tornillo, siendo dicha tuerca solidaria en traslación del primer elemento, de los primeros medios de guiado definiendo un guiado lineal paralelo al eje del tornillo para bloquear la rotación de la tuerca en una primera fase de desplazamiento de la tuerca y de los segundos medios de guiado definiendo un guiado helicoidal que se extiende según el eje del tornillo y que tiene un paso invertido respecto a la tuerca en el mismo sentido de rotación que el tornillo en una segunda fase de desplazamiento de la tuerca, así como un sistema de compensación interpuesto entre el primer elemento y un soporte móvil solidario de la tuerca para reiniciar la posición de este primer elemento respecto al segundo elemento, de modo que la primera y segunda fase de desplazamiento engendradas por el primer y segundo medios de guía permanezcan sincrónicas con las fases necesarias para una optimización del desplazamiento del primer elemento.
Según la invención el sistema de compensación comprende un disco de reajuste solidario en rotación de un buje atornillado alrededor del soporte móvil, un disco de medición montado sobre el soporte móvil por medio de un mecanismo con rueda libre y al menos un resorte de almacenamiento de energía interpuesto entre el disco de reajuste y el disco de medición, de manera que la memorización del estado de desgaste de las piezas se concretice por la posición angular relativa del disco de medición y del soporte móvil. Durante la segunda fase de desplazamiento de la tuerca, la necesidad de efectuar un reajuste de desgaste se muestra por el topamiento del disco de medición sobre el elemento móvil, arrastrado entonces el disco de reajuste en rotación por el buje comprimiendo el(los) resorte(s) hasta el final del movimiento del soporte móvil.
Así, este sistema de compensación se dirige de manera completamente autónoma sin ninguna clase de intervención exterior. No utiliza por lo tanto ningún accionador -aparte del accionador principal del mecanismo- para efectuar la función de reajuste que consiste en hacer sincrónico el movimiento de las piezas de desgaste con las dos fases generadas por el accionador de sujeción principal.
Otras características, complementarias o alternativas, de la invención son las siguientes:
La invención también pretende perfeccionar la herramienta de sujeción descrita en la patente FR2822401 y en la solicitud PCT/FR02/00444 que consiste en un accionador de ganancia mecánica variable. La herramienta de sujeción descrita en estas dos publicaciones comprende una tuerca que coopera, por una parte, de manera reversible, con un tornillo arrastrado en rotación por un motor y, por otra parte, gracias a al menos un rodillo montado loco sobre un eje perpendicular al del...
Reivindicaciones:
1. Herramienta de sujeción comprendiendo un primer elemento (18) y un segundo elemento (20) capaces de un desplazamiento relativo bajo la acción de un dispositivo de arrastre, comprendiendo este dispositivo un tornillo (10) de un paso dado (P1) apropiado para ser arrastrado en rotación alrededor de un eje (XX), en un sentido o en un sentido opuesto bajo la acción de un motor (M), una tuerca (12) cooperando con el tornillo (10) y apropiada para ser arrastrada en traslación en la dirección del eje (XX) del tornillo, siendo dicha tuerca solidaria en traslación del primer elemento (18), de los primeros medios de guiado (34L) definiendo un guiado lineal paralelo al eje (XX) del tornillo (10) para bloquear la rotación de la tuerca (12) en una primera fase de desplazamiento (D1) de la tuerca y de los segundos medios de guía (34H) definiendo una guía helicoidal que se extiende según el eje (XX) del tornillo (10) y que tiene un paso (P2) invertido respecto al paso (P1) del tornillo para permitir la rotación de la tuerca (12), en el mismo sentido de rotación que el tornillo (10) en una segunda fase de desplazamiento (D2) de la tuerca, así como un sistema de compensación (46) interpuesto entre el primer elemento (18) y un soporte móvil (14) solidario de la tuerca (12) para reiniciar la posición de este primer elemento (18) respecto al segundo elemento (20), de manera que la primera y segunda fase de desplazamiento engendradas por el primer y segundo medio de guiado (34L y 34H) permanezcan sincrónicas con las fases necesarias para una optimización del desplazamiento del primer elemento, caracterizada porque el sistema de compensación comprende un disco de reajuste (68) solidario en rotación de un buje (50) atornillado alrededor del soporte móvil (14), un disco de medición (80) montado sobre el soporte móvil (14) por medio de un mecanismo con rueda libre (76) y al menos un resorte (74) de almacenamiento de energía interpuesto entre el disco de reajuste (68) y el disco de medición (80), de modo que la memorización del estado de desgaste de las piezas se concretice por la posición angular relativa del disco de medición (80) y del soporte móvil (14) y porque durante la segunda fase de desplazamiento (D2) de la tuerca (12), la necesidad de efectuar un reajuste de desgaste se muestra por el topamiento del disco de medición (80) sobre el elemento móvil (18), arrastrado entonces el disco de reajuste (68) en rotación por el buje (50) comprimiendo el(los) resorte(s) (74) hasta el final del movimiento del soporte móvil (14).
2. Herramienta de sujeción según la reivindicación 1, caracterizada porque el mecanismo con rueda libre (76) solo permite la rotación del soporte móvil (14) en el disco de medición (80) en un solo sentido (R).
3. Herramienta de sujeción según una de las reivindicaciones 1 y 2, caracterizada porque el(los) resorte(s) (74) está(n) calculado(s) para almacenar la energía necesaria para la operación de reajuste y liberar esta energía cuando el nivel de tensión entre el buje (50) y el soporte móvil (14) genere un par resistente inferior al producido por el(los) resorte(s) en compresión, pudiéndose hacer esta liberación de energía solo por la rotación del disco de reajuste (68) debido a que el mecanismo con rueda libre (76) impide que gire el disco de medición (80).
4. Herramienta de sujeción según una de las reivindicaciones 1 a 3, caracterizada porque, excepcionalmente, si el espacio a reajustar es demasiado importante o cuando el(los) resorte(s) (74) ha(n) alcanzado una tasa de compresión máxima, el disco de reajuste (68) y el disco de medición (80) se bloquean en rotación, provocando así un movimiento relativo entre el soporte móvil (14) y el buje (50) para efectuar una fase de reajuste en tiempo real.
5. Herramienta de sujeción según la reivindicación 4, caracterizada porque, tras la fase de reajuste en tiempo real y cuando el nivel de tensión entre el soporte móvil (14) y el buje (50) haya disminuido, la energía almacenada en el(los) resorte(s) (74) antes de la fase de reajuste en tiempo real es apta para afinar dicha fase de reajuste y volver hacer caer el conjunto de las tensiones generadas en la cinemática por esta operación.
6. Herramienta de sujeción según una de las reivindicaciones 1 a 5, en la que la tuerca (12) coopera, gracias a al menos un rodillo (28) montado loco sobre un eje (YY) perpendicular al eje (XX) del tornillo (10), con una abrazadera (30) constituida por una pared cilíndrica (32) concéntrica al tornillo (10) y en la cual está tallada al menos una garganta helicoidal (34) con paso variable pero de sentido inverso respecto al del tornillo, garganta en la que rueda el rodillo (28), caracterizada porque el rodillo (28) presenta un perfil troncocónico, mientras que la cara de contacto correspondiente de la garganta (34) está inclinada respecto al eje (YY) del rodillo (28) en un valor tal que el aumento de velocidad provocado por el alejamiento del eje (XX) del punto de contacto entre el rodillo (28) y la pared cilíndrica (32) esté íntegramente compensado por el aumento del diámetro del rodillo (28) en función de este mismo alejamiento, asegurando así un contacto continuo y homogéneo entre el rodillo (28) y la cara de la garganta (34) no provocando ningún deslizamiento parasitario, cualesquiera que sean los valores relativos del grosor (E) de la pared cilíndrica (32) de la abrazadera, del diámetro (D) de la abrazadera y del diámetro (d) del rodillo (28).
7. Herramienta de sujeción según la reivindicación 6, caracterizada porque comprende varios rodillos (28) coplanarios con el fin de que los esfuerzos, que produce en su eje su perfil troncocónico, se anulen y no provoquen ninguna tensión sobre el tornillo.
8. Herramienta de sujeción según la reivindicación 7, caracterizada porque comprende dos rodillos a 180º o tres rodillos a 120º.
9. Herramienta de sujeción según una de las reivindicaciones 6 a 8, caracterizada porque se prevé en cada rodillo (28) un tope (88) permitiendo retomar el esfuerzo axial generado por el perfil troncocónico del rodillo.
10. Herramienta de sujeción según la reivindicación 6, caracterizada porque entre el tornillo (10) y la tuerca (12) se prevé un juego mecánico superior al valor de la tolerancia del centrado de la tuerca (12) por los rodillos (28) con el fin de proteger al tornillo (10) de todos los fenómenos hiperestáticos que podrían tensarlo.
Patentes similares o relacionadas:
Electrodo para una pinza de soldar, del 8 de Julio de 2020, de KME Special Products GmbH: Electrodo para una pinza de soldar que comprende un vástago de electrodo con un capuchón de soldar en el extremo, que está sujeto de manera desprendible a un soporte […]
Dispositivo de soldadura por resistencia, del 29 de Abril de 2020, de OTTO BIHLER HANDELS-BETEILIGUNGS-GMBH: Dispositivo de soldadura por resistencia que comprende dos electrodos de soldadura dispuestos de manera opuesta, conectados a una fuente de corriente de soldadura […]
Dispositivo y procedimiento de sujeción de una parte de una pistola de soldadura, del 13 de Noviembre de 2019, de COMAU, INC: Dispositivo de manipulación y conexión de componentes de combinación conectable a un robot de múltiples ejes para ser utilizado en el […]
Robot articulado que lleva un cabezal de soldadura por resistencia eléctrica con electrodos ubicados en el mismo lado, procedimiento correspondiente de soldadura por resistencia eléctrica en un componente a soldar, del 7 de Agosto de 2019, de COMAU S.P.A.: Un robot articulado (R) que lleva un cabezal de soldadura por resistencia eléctrica (T) con electrodos ubicados en el mismo lado, el robot articulado (R) tiene una muñeca […]
Aparato para el remachado, del 7 de Agosto de 2019, de COMAU S.P.A.: Aparato para aplicar remaches en una parte (π) de una superficie plana de una pieza (P), en el que dicha parte (π) de la superficie plana define un eje operativo […]
Dispositivo para la fijación de un peso de compensación en un árbol, del 24 de Julio de 2019, de SCHENCK ROTEC GMBH: Dispositivo para una máquina para equilibrar árboles, para la fijación de un peso de compensación en un árbol con un dispositivo a modo de una pinza que […]
Dispositivo de soldadura por resistencia, del 12 de Junio de 2019, de OTTO BIHLER HANDELS-BETEILIGUNGS-GMBH: Dispositivo de soldadura por resistencia que comprende dos electrodos de soldadura que están opuestos entre sí y se pueden conectar a una fuente […]
Dispositivo de soldadura por resistencia con un sensor de carga, del 15 de Mayo de 2019, de Tecna S.p.A: Dispositivo de soldadura por resistencia, que comprende unos medios para mover entre sí un par de mordazas , que soportan unos respectivos electrodos […]