DISPOSITIVO DE FORMACION DE LOTES DE CANTIDADES VARIABLES DE OBJETOS PARA UNA CAPA QUE SE DEBE PALETIZAR.
Dispositivo de formación de lotes de cantidades variables de objetos para una capa de paletización,
que comprende por lo menos una primera estación (30) para la variación del número de hileras (12) de un grupo de hileras (13) alimentado al dispositivo (10) con unas características preestablecidas y constantes, en el que dicha primera estación (30) comprende una correa de avance motorizada (31), una superficie de acumulación lateral (33) para unas hileras (12) de objetos (11), además de un par de empujadores laterales (35A, 35B) para mover las hileras (12) y/o los grupos de hileras (13) de objetos, caracterizado porque comprende una segunda estación (40) para la separación y/o alineación transversal del grupo de hileras (13), en el que dicha segunda estación (40) para la separación y/o alineación transversal de dicho grupo de hileras (13) comprende un par de correas de avance motorizadas adyacentes (41A y 41B), siendo móvil por lo menos una de dichas correas (41A y 41B) a lo largo de unas guías (43) ortogonales a la dirección de avance (F) para la separación y/o alineación transversal de los grupos de hileras (13)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06117548.
Solicitante: OCME S.R.L..
Nacionalidad solicitante: Italia.
Dirección: VIA DEL POPOLO, 20/A,43100 PARMA.
Inventor/es: GATTESCHI, EMANUELE.
Fecha de Publicación: .
Fecha Solicitud PCT: 20 de Julio de 2006.
Fecha Concesión Europea: 14 de Octubre de 2009.
Clasificación Internacional de Patentes:
- B65B35/40 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 35/00 Suministro, alimentación, disposición u orientación de artículos a ser empaquetados. › por empujadores oscilantes o de movimiento alternativo.
- B65G47/08D4
Clasificación PCT:
- B65G47/08 B65 […] › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › espaciando o agrupando los objetos durante la alimentación (durante el transporte por el transportador B65G 47/28).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Dispositivo de formación de lotes de cantidades variables de objetos para una capa que se debe paletizar.
La presente invención se refiere a un dispositivo de formación de lotes de cantidades variables de objetos para una capa que se debe paletizar.
Para su embalaje en palés, objetos tales como rollos de papel higiénico y/o rollos de cocina empaquetados según diversas configuraciones, u otros objetos, son agrupados en lotes que contribuyen a formar una capa de un palé en formación.
En la técnica conocida, esto tiene lugar en las denominadas islas o estaciones de paletización robotizada por medio de uno o más manipuladores equipados con pinzas para transferir los lotes.
Cuando se superponen capas estables, éstas consisten generalmente en lotes que tienen diferentes configuraciones, por ejemplo que contienen un número variable de objetos o hileras. Además, los lotes están dispuestos dentro de la capa según configuraciones programables.
Pueden formarse lotes que consisten en una cantidad variable de objetos según diferentes procedimientos conocidos. Puede usarse, por ejemplo, un sistema, que gestione objetos únicos o múltiples con empujadores desde una línea transportadora específica. Sin embargo, esta solución crea problemas en relación con la sobrecarga y la dificultad de alcanzar altas tasas de funcionamiento.
Por ejemplo, el documento EP-A1-0 959 002 describe un dispositivo de formación de lotes según el preámbulo de la reivindicación 1, en el que los productos empaquetados de forma individual que llegan desde un transportador son recogidos en una estación de agrupamiento para formar hileras que se mueven a continuación por un empujador transversal hasta dejarlas sobre una placa de recogida.
Una segunda solución contempla la utilización de una máquina ensacadora que envía lotes de objetos que consisten en cantidades programadas variables de objetos a la unidad de paletización para formar una capa de palé, excluyendo la película de envoltura.
Los lotes que consisten en cantidades variables de objetos deben respetar una secuencia que se obtiene por la programación de la máquina ensacadora.
Sin embargo, algunos esquemas de lotes son difíciles de efectuar y, si esto es posible, pueden crear límites de velocidad. Sobre todo, el funcionamiento de las máquinas ensacadoras es extremadamente complejo y, en el caso de parada de la planta, puede ser necesario vaciar la máquina para restablecer la secuencia correcta de lotes a paletizar.
Un objetivo de la presente invención es proporcionar un dispositivo para formar lotes de cantidades variables de objetos para una capa que se debe paletizar, que supere los límites técnicos de la técnica conocida descrita anteriormente.
Otro objetivo de la presente invención es proporcionar un dispositivo para formar lotes de cantidades variables de objetos para una capa que se debe paletizar, que permita que se alcance la máxima flexibilidad en esquemas de paletización de alta velocidad.
Otro objetivo de la presente invención es proporcionar un dispositivo para formar lotes de cantidades variables de objetos para una capa que se debe paletizar, que sea particularmente simple y funcional, con costes reducidos.
Estos objetivos según la presente invención se alcanzan proporcionando un dispositivo para formar lotes de cantidades variables de objetos para una capa que se debe paletizar según se especifica en la reivindicación 1.
Otras características se indican en las reivindicaciones subordinadas.
Las características y ventajas de un dispositivo para formar lotes de cantidades variables de objetos para una capa que se debe paletizar según la presente invención se pondrán más claramente de manifiesto a partir de la siguiente descripción ilustrativa y no limitativa, haciendo referencia a los dibujos esquemáticos adjuntos, en los que:
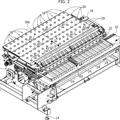
la figura 1 muestra esquemáticamente una vista en planta del dispositivo para formar lotes de cantidades variables de objetos para una capa que se debe paletizar según la presente invención;
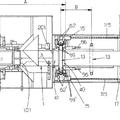
la figura 2 es una vista esquemática elevada de diversos detalles de la figura 1;
las figuras 3 a 7 muestran esquemáticamente diferentes hipótesis de funcionamiento del dispositivo para formar lotes de cantidades variables de objetos para una capa que se debe paletizar según la presente invención; y
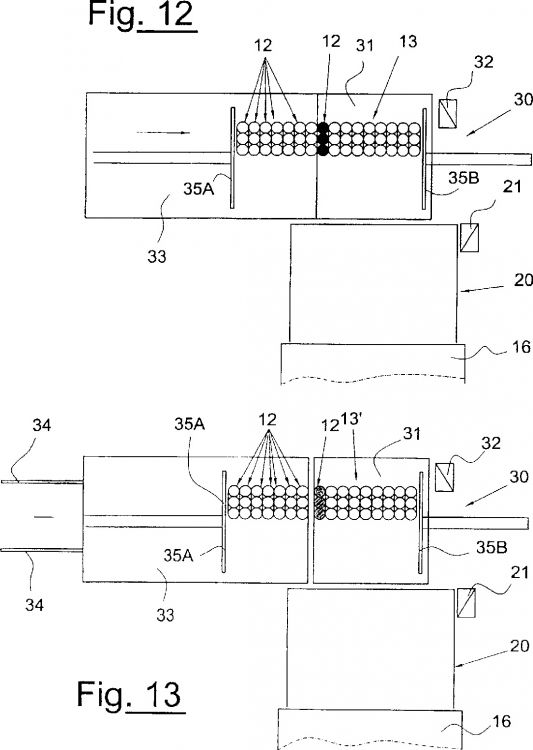
las figuras 8 a 13, por otro lado, muestran la secuencia de operaciones para incrementar el número de hileras de objetos a gestionar.
Haciendo referencia a las figuras, éstas muestran un dispositivo para formar lotes de cantidades variables de objetos para una capa que se debe paletizar, indicado como un todo con 10.
En la siguiente descripción, los objetos 11 indican, por ejemplo, rollos de papel higiénico y/o rollos de cocina empaquetados según diversas configuraciones, denominados productos sueltos. Uno o más objetos, o productos sueltos, 11 alineados uno con otro en una dirección longitudinal o paralelos a una dirección de transporte, indicados como F, forman una hilera de objetos 12. El término "hilera de objetos" comprende también el caso límite en el que la hilera 12 consta de sólo un objeto 11.
Una o más hileras de objetos 12 dispuestas adyacentes una a otra en una dirección transversal con respecto a la dirección de transporte F se definen en la siguiente descripción como grupo de hileras 13. La expresión "grupo de hileras" comprende también el caso límite en el que el grupo de hileras 13 consta de sólo una hilera 12.
El grupo de hileras 13 que contienen un número requerido de objetos 11 en relación con el programa de paletización preestablecido y adecuado para ser movido por un robot no mostrado, en una isla de paletización subsiguiente 15, se define como lotes 14.
El dispositivo 10 de formación de lotes de cantidades variables de objetos para una capa que se debe paletizar, objeto de la presente invención, es adecuado para recibir grupos de hileras 13 en una cantidad constante a partir de un dispositivo 16 de formación de hileras, mostrado esquemáticamente en las figuras, y también para alimentar lotes 14, que constan de una cantidad programada variable de hileras, a la isla de paletización 15 esquematizada en la figura 1 con dos pares de cintas transportadoras. El dispositivo 16 de formación de hileras consiste, por ejemplo, en una máquina ensacadora que funciona sin la aplicación de una película de plástico. La isla de paletización 15, del tipo conocido, comprende un robot, no mostrado, equipado con pinzas para agarrar un lote 14 de objetos y transferirlo a lo largo de una trayectoria rototranslatoria en una posición predefinida hasta dejarlo sobre una capa 17 de un palé en formación, esquemáticamente mostrada con la línea de trazos y puntos.
El dispositivo 10, ilustrado esquemáticamente en las figuras 1 y 2, comprende una primera correa de evacuación 20 de grupos de hileras 13, una primera estación de variación 30 del número de hileras 12, una segunda estación 40 para la alineación y/o la separación transversal de los grupos de hileras 13 y, en último lugar, una estación final 50 para la separación longitudinal de los grupos de hileras 13.
La primera correa de evacuación 20, que está equipada con un motor 21, recibe unos grupos de hileras 13, iguales entre ellos, desde el dispositivo 16 de formación de hileras y los transfiere según la dirección de avance F a la siguiente estación 30, que comprende una correa 31 equipada con su propio motor 32 para transferir las hileras 12 en una dirección de avance F. La estación 30 comprende también una superficie de acumulación lateral 33 para las hileras de objetos 12, que se mueve transversalmente a lo largo de guías 34, y un par de empujadores laterales 35A y 35B, móviles también en una dirección transversal independientemente uno de otro. Los empujadores 35A y 35B son activados en posición por dos servomotores controlados en posición, no mostrados, y empujan una o más hileras 12 de objetos desde la superficie de acumulación 33 al grupo de hileras 13 o viceversa. De esta manera, es posible modificar el número de hileras 12 del grupo de hileras 13 que proceden del dispositivo de formación 16 aguas abajo y que tienen un número fijo de hileras 12.
La estación 40 para la alineación y/o la separación transversal de los grupos de hileras 13 comprende un par de correas transportadoras adyacentes 41A y 41B, presentando cada una de ellas su propia...
Reivindicaciones:
1. Dispositivo de formación de lotes de cantidades variables de objetos para una capa de paletización, que comprende por lo menos una primera estación (30) para la variación del número de hileras (12) de un grupo de hileras (13) alimentado al dispositivo (10) con unas características preestablecidas y constantes, en el que dicha primera estación (30) comprende una correa de avance motorizada (31), una superficie de acumulación lateral (33) para unas hileras (12) de objetos (11), además de un par de empujadores laterales (35A, 35B) para mover las hileras (12) y/o los grupos de hileras (13) de objetos, caracterizado porque comprende una segunda estación (40) para la separación y/o alineación transversal del grupo de hileras (13), en el que dicha segunda estación (40) para la separación y/o alineación transversal de dicho grupo de hileras (13) comprende un par de correas de avance motorizadas adyacentes (41A y 41B), siendo móvil por lo menos una de dichas correas (41A y 41B) a lo largo de unas guías (43) ortogonales a la dirección de avance (F) para la separación y/o alineación transversal de los grupos de hileras (13).
2. Dispositivo según la reivindicación 1, caracterizado porque dicha superficie de acumulación (33) puede moverse transversalmente a lo largo de unas guías (34) alejándose de dicha correa (31) y aproximándose hacia la misma.
3. Dispositivo según la reivindicación 1, caracterizado porque dicho par de empujadores laterales (35A, 35B) pueden ser movidos cada uno de ellos independientemente en sentido transversal con unos servomotores controlados en posición.
4. Dispositivo según la reivindicación 1, caracterizado porque ambas de dichas correas de avance (41A y 41B) pueden moverse a lo largo de dichas guías (43).
5. Dispositivo según la reivindicación 4, caracterizado porque dicha segunda estación (40) comprende un elemento estabilizador neumático (44) solidario con cada una de dichas correas subyacentes (41A y 41B) y equipado con una placa (45) que se puede desplazar en altura.
6. Dispositivo según la reivindicación 1, caracterizado porque comprende una primera correa de evacuación (20) de unos grupos de hileras (13) según una dirección de avance (F), situada aguas arriba de dicha primera estación (30) para modificar el número de hileras (12), estando equipada dicha correa (20) con un motor (21).
7. Dispositivo según la reivindicación 1, caracterizado porque comprende una estación final (50) para la separación longitudinal de dicho grupo de hileras (13), en el que dicha estación final (50) comprende un par de correas adyacentes (51A y 51B), equipada cada una de ellas con una motorización independiente (52A y 52B), para el avance de los objetos (11) en la dirección (F), presentando dichas correas (51A y 51B) la posibilidad de activarse a diferentes velocidades con respecto a dicho par de correas (41A y 41B) de dicha segunda estación (40) para la separación y/o alineación transversal de dicho grupo de hileras (13).
Patentes similares o relacionadas:
 Máquina de embalaje para un único producto o para productos agrupados y/o apilados, en paquetes de material termoplástico obtenido a partir de una película desenrollada de una bobina, y método de funcionamiento asociado, del 29 de Abril de 2020, de CPS COMPANY S.R.L: Máquina de embalaje para embalar productos individuales o agrupados y/o apilados, en paquetes de material termoplástico, comprendiendo dicha máquina:
- un dispositivo […]
Máquina de embalaje para un único producto o para productos agrupados y/o apilados, en paquetes de material termoplástico obtenido a partir de una película desenrollada de una bobina, y método de funcionamiento asociado, del 29 de Abril de 2020, de CPS COMPANY S.R.L: Máquina de embalaje para embalar productos individuales o agrupados y/o apilados, en paquetes de material termoplástico, comprendiendo dicha máquina:
- un dispositivo […]
Un aparato para desplazar artículos que avanzan continuamente a lo largo de una dirección de avance, del 1 de Abril de 2020, de MARCHESINI GROUP S.P.A.: Un aparato para desplazar artículos que avanzan continuamente a lo largo de una dirección de avance (A), teniendo los artículos que ser desplazados y empujados transversalmente, […]
Sistemas y métodos de transportador mecánico y envasado de alimentos, del 8 de Enero de 2020, de INTERCONTINENTAL GREAT BRANDS LLC: Un aparato de envasado de productos alimenticios que comprende: un transportador mecánico corriente arriba que transporta artículos […]
Aparato de inserción, del 1 de Enero de 2020, de TOYO JIDOKI CO., LTD.: Un aparato de inserción para colocar un objeto de embalaje en un saco de embalaje , comprendiendo el aparato de inserción : un conjunto […]
Método y dispositivo para agrupar piezas en bruto de productos, del 4 de Diciembre de 2019, de Texa AG: Método para agrupar productos alargados configurados como latas, tubos o cartuchos, preferiblemente, vacíos, en donde los productos se suministran con una instalación […]
Sección de proceso de una máquina de embalaje, del 2 de Octubre de 2019, de Standard Knapp Inc: Sección de procesamiento de una máquina de embalaje que comprende: un transportador configurado para ser accionado por un primer elemento de accionamiento ; […]
Aparato de embalaje de medicamentos, del 2 de Octubre de 2019, de JVM Co., Ltd: Un aparato de embalaje de medicamentos , que comprende: una tolva de rotación provista de una pluralidad de espacios de partición (C1-CN), […]
 Aparato y procedimiento de formación de grupos de productos, del 25 de Septiembre de 2019, de CAVANNA S.P.A.: Aparato de formación de grupos de productos, que comprende:
- una cinta transportadora que tiene una superficie (16a) de transporte móvil en una dirección […]
Aparato y procedimiento de formación de grupos de productos, del 25 de Septiembre de 2019, de CAVANNA S.P.A.: Aparato de formación de grupos de productos, que comprende:
- una cinta transportadora que tiene una superficie (16a) de transporte móvil en una dirección […]