DISPOSITIVO EN UN VEHICULO EN VUELO Y UN PROCEDIMIENTO PARA PREVENIR COLISIONES.
Un dispositivo en un vehículo en vuelo que comprende
- un sistema de control de vuelo dispuesto para controlar el comportamiento del vehículo en vuelo en base a órdenes de aceleración,
- una primera unidad de control dispuesta para proporcionar las citadas órdenes de aceleración en base a las misiones planeadas u órdenes directas al sistema de control de vuelo,
- una unidad de prevención de colisiones,
- una unidad de detección dispuesta para detectar si el vehículo en el aire se encuentra en un curso de colisión,
que se caracteriza porque la unidad de prevención de colisiones comprende una segunda unidad de control dispuesta para alimentar directamente las órdenes de aceleración forzada al sistema de control de vuelo después de la detección de que el vehículo en vuelo se encuentra en un curso de colisión
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06127063.
Solicitante: SAAB AB.
Nacionalidad solicitante: Suecia.
Dirección: MOROTSVAGEN 5,582 75 LINKOPING.
Inventor/es: SKARMAN,ERIK.
Fecha de Publicación: .
Fecha Solicitud PCT: 22 de Diciembre de 2006.
Fecha Concesión Europea: 10 de Marzo de 2010.
Clasificación Internacional de Patentes:
- G08G5/00F2
- G08G5/04E
Clasificación PCT:
- G01S13/93 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › para anticolisión.
- G08G5/04 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 5/00 Sistemas del control del tráfico aéreo. › Sistemas anticolisión.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Dispositivo en un vehículo en vuelo y un procedimiento para prevenir colisiones.
Campo técnico
La presente invención se refiere a un dispositivo en un vehículo en vuelo que comprende un sistema de control de vuelo dispuesto para controlar el comportamiento del vehículo en vuelo en base a las órdenes de aceleración o similares, una primera unidad de control dispuesta para proporcionar las citadas órdenes de aceleración al sistema de control de vuelo y una unidad de prevención de colisiones.
La presente invención se relaciona adicionalmente con un procedimiento para evitar colisiones en un vehículo en vuelo.
Antecedentes
Se conocen en la técnica procedimientos para su utilización por vehículos en vuelo para detectar cuando el vehículo en vuelo se encuentra en un curso de colisión con otro vehículo en vuelo. A continuación se exponen algunas de estas revelaciones referidas a la detección de cuando el vehículo en vuelo se encuentra en un curso de colisión con otro objeto.
El documento WO 2006/021813 desvela un procedimiento para determinar si existe conflicto entre un vehículo anfitrión y un vehículo intrusor.
El documento WO 1997/34276 describe un procedimiento para detectar riesgo de colisión en un avión. El procedimiento consiste en calcular la probabilidad de que el avión propio se encuentre presente en sectores predeterminados en un número de puntos seleccionados en el tiempo. Estas probabilidades del avión propio y las probabilidades de otros objetos se utilizan para calcular la probabilidad de que el avión propio y al menos uno de los otros objetos se encuentren presentes en cualquiera de los sectores simultáneamente.
El documento WO 2001/13138 describe otro procedimiento para detectar el riesgo de colisión con al menos otro vehículo. El procedimiento comprende los pasos de recoger información sobre la posición de al menos el vehículo propio y de un segundo vehículo en vuelo durante un tiempo predeterminado de predicción, y decidir, a partir de los cursos previstos, si el vehículo propio en vuelo está en riesgo de chocar con el otro vehículo en vuelo. Cuando existe este tipo de riesgo, se emite un aviso de colisión y se indica una maniobra para salir del curso de colisión. Si la maniobra propuesta no se ejecuta, el sistema realiza la citada maniobra.
El documento DE 43 27 706 describe una disposición para monitorizar el espacio aéreo para un avión. Se asegura la identificación oportuna de una posible colisión de un avión que se encuentra en un espacio aéreo específico con otra aeronave que es tangencial o que cruza el área de su ruta de vuelo. La disposición analiza a tiempo las posibles colisiones o casi accidentes en todas las variantes de vuelo y determina las desviaciones de curso horizontal y vertical alternativas con el fin de maniobrar la aeronave en un plazo corto. La información obtenida se muestra, sin sobrecargar la fase de decisión del piloto.
También el documento norteamericano 6 546 338 se refiere a la preparación de una ruta de evasión de manera que una aeronave pueda resolver un conflicto de rutas con otra aeronave. En general, la ruta de la evasión se prepara en dos partes, una parte evasiva y una parte orientada a la ruta inicial de la aeronave. La parte evasiva se prepara de manera que la aeronave amenazante tome una trayectoria en relación con la aeronave amenazada que sea tangencial a los bordes del ángulo en el cual la aeronave amenazante percibe un círculo de protección trazado alrededor de la aeronave amenazada. El radio del círculo de protección es igual a una distancia de separación mínima admisible. Una vez que la ruta de la evasión ha sido aceptada por la tripulación de la aeronave, un ordenador de gestión de vuelo de la aeronave asegura de que la ruta de evasión es seguida por el piloto automático.
El documento norteamericano 6 510 388 describe un procedimiento para evitar la colisión entre aviones de combate, por ejemplo, durante el entrenamiento de combate aéreo. El procedimiento comprende el cálculo de una posible trayectoria de maniobra de evasión para las aeronaves involucradas y la comparación de las trayectorias de maniobra de evasión calculadas para el otro avión con la trayectoria de la maniobra de evasión calculada para la propia aeronave con el fin de asegurar que la trayectoria de maniobra de evasión del vehículo en cada momento durante su lapso calculado se encuentra a una distancia mínima estipulada predeterminada de las trayectorias de maniobra de evasión de las demás aeronaves. Se emite una advertencia a la persona que maniobra el vehículo y/o se hace que el avión siga una trayectoria de maniobra de evasión previamente calculada y almacenada para el avión si la comparación muestra que la trayectoria de maniobra de evasión de una aeronave en cualquier momento durante su lapso calculado está situada a una distancia de la trayectoria de la maniobra de evasión de cualquiera de las otras aeronaves que es menor que la distancia mínima estipulada.
En resumen, se conocen en la técnica procedimientos para detectar cuando una aeronave está en un curso de colisión con otro objeto. Además, se conocen en la técnica procedimientos para el cálculo de trayectorias de maniobras de evasión para su uso cuando se detecta un curso de colisión. Se puede hacer que el avión siga dichas trayectorias de maniobra de evasión, ya sea automáticamente o bajo el control de un piloto.
Sumario
Un objeto de la presente invención es proporcionar una forma de ejecutar automáticamente maniobras de evasión en un vehículo en vuelo después de la detección de un curso de colisión con un obstáculo, en el que se minimiza el riesgo de colisión durante la maniobra de evasión.
Esto se ha logrado de acuerdo con una realización de la presente invención por medio de un dispositivo de control de vuelo montado en un vehículo en vuelo. El dispositivo está montado convenientemente, por ejemplo, en un vehículo no tripulado (UAV), un avión de combate, o un avión comercial. El dispositivo comprende un sistema de control de vuelo (FCS) dispuesto para controlar el comportamiento del vehículo en vuelo por medio de órdenes de aceleración u otras similares. La expresión "comportamiento" en la presente memoria descriptiva se refiere a la dirección del vehículo en vuelo. De esta manera, la expresión "controlar el comportamiento" en general significa el control del vehículo en vuelo con el fin de seguir una trayectoria deseada a las velocidades deseadas. Una primera unidad de control del dispositivo está dispuesta para proporcionar las órdenes de aceleración al sistema de control de vuelo con el fin de controlar el vehículo en vuelo de acuerdo con el comportamiento deseado. Una unidad de prevención de colisiones del dispositivo comprende una unidad de detección dispuesta para detectar si el vehículo en el aire se encuentra en un curso de colisión y una segunda unidad de control está dispuesta para alimentar las órdenes de aceleración forzada al sistema de control de vuelo después de la detección de que el vehículo en vuelo se encuentra en un curso de colisión.
El dispositivo proporciona un control firme de las maniobras de evasión. Esto se debe a que no se ejecutan cálculos de maniobra de evasión. El dispositivo está dispuesto para formar directamente los datos de entrada al sistema de control de vuelo en lugar de calcular en primer lugar una trayectoria de maniobra de evasión y a continuación formar los datos de entrada al sistema de control de vuelo en base a la trayectoria de la maniobra de evasión calculada. El dispositivo es especialmente ventajoso cuando el vehículo en vuelo se encuentra en un curso de colisión con otro vehículo en vuelo.
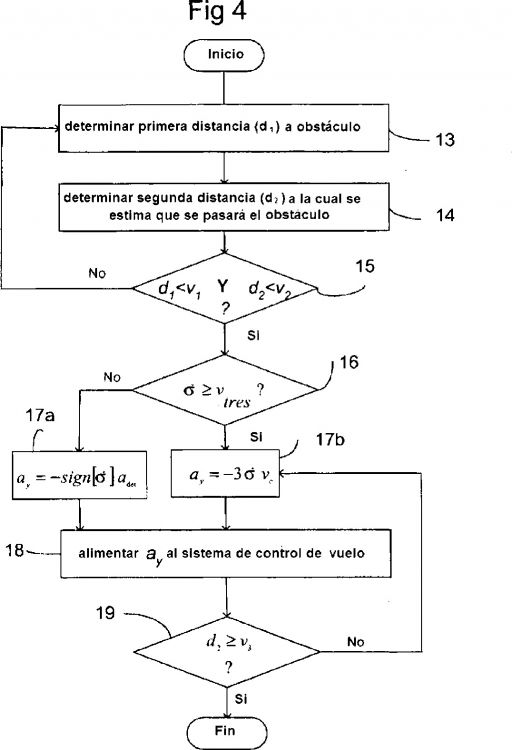
En una realización preferida de la invención, la unidad de detección está dispuesta para determinar una primera distancia, al menos a un obstáculo y una segunda distancia a la cual se estima que pasará el citado al menos un obstáculo, y para activar la segunda unidad de control cuando la primera distancia es menor que un primer valor predeterminado y la segunda distancia es menor que un segundo valor predeterminado. La segunda distancia en un ejemplo está determinada en función de la primera distancia al obstáculo y la derivada con respecto al tiempo de la línea de visión (s).
En otra realización preferida, la unidad de detección también está dispuesta para desactivar la segunda unidad de control cuando la segunda distancia supera un tercer valor predeterminado. De acuerdo con esta realización, las maniobras de evasión pueden ser diseñadas para...
Reivindicaciones:
1. Un dispositivo en un vehículo en vuelo que comprende
que se caracteriza porque la unidad de prevención de colisiones comprende una segunda unidad de control dispuesta para alimentar directamente las órdenes de aceleración forzada al sistema de control de vuelo después de la detección de que el vehículo en vuelo se encuentra en un curso de colisión.
2. Un dispositivo en un vehículo en vuelo de acuerdo con la reivindicación 1, que se caracteriza porque la unidad de detección está dispuesta para determinar una primera distancia a al menos un obstáculo y una segunda distancia a la cual se estima que pase el citado al menos un obstáculo, y para activar la segunda unidad de control cuando la primera distancia es inferior a un primer valor predeterminado y la segunda distancia es inferior a un segundo valor predeterminado.
3. Un dispositivo en un vehículo en vuelo de acuerdo con la reivindicación 2, que se caracteriza porque la unidad de detección está dispuesta para desactivar la segunda unidad de control cuando la segunda distancia superior a un tercer valor predeterminado.
4. Un dispositivo en un vehículo en vuelo de acuerdo con la reivindicación 1, que se caracteriza porque la segunda unidad de control comprende una unidad de cálculo dispuesta para
5. Un dispositivo en un vehículo en vuelo de acuerdo con la reivindicación 4, que se caracteriza porque la unidad de cálculo está dispuesta para formar las órdenes de aceleración en base a la ecuación ay = - kvcs, en la que ay es la aceleración en una dirección perpendicular a la dirección de desplazamiento y k es una constante positiva.
6. Un dispositivo en un vehículo en vuelo de acuerdo con la reivindicación 5, que se caracteriza porque la constante k se encuentra dentro del rango de 1 a 6.
7. Un dispositivo en un vehículo en vuelo de acuerdo con la reivindicación 6, que se caracteriza porque la constante k se encuentra dentro del rango de 2 a 4.
8. Un dispositivo en un vehículo en vuelo de acuerdo con la reivindicación 7, que se caracteriza porque la constante k es de aproximadamente 3.
9. Un dispositivo en un vehículo en vuelo de acuerdo con la reivindicación 4, que se caracteriza porque la segunda unidad de control comprende una unidad de precálculo dispuesta para comparar la derivada con respecto al tiempo de la línea de visión (s) o una equivalente de la misma con un valor umbral, y si se supera el valor umbral, activar la unidad de cálculo y si no se supera, alimentar una orden de aceleración forzada predeterminada al sistema de control de vuelo.
10. Un dispositivo en un vehículo en vuelo de acuerdo con la reivindicación 4, que se caracteriza porque la segunda distancia se determina como una función de la distancia al obstáculo y la derivada con respecto al tiempo de la línea de visión (s).
11. Un procedimiento para evitar colisiones en un vehículo en el aire que comprende las etapas de:
12. Un procedimiento para evitar colisiones en el aire en un vehículo de acuerdo con la reivindicación 11,
que se caracteriza porque la etapa de detectar si el vehículo en el aire se encuentra en un curso de colisión, comprende las etapas de
13. Un procedimiento para evitar colisiones en un vehículo en vuelo de acuerdo con la reivindicación 12,
que se caracteriza por
14. Un procedimiento para evitar colisiones en un vehículo en vuelo de acuerdo con la reivindicación 12, que se caracteriza porque la segunda distancia se determina en función de la distancia al obstáculo y la derivada con respecto al tiempo de la línea de visión (s).
15. Un procedimiento para evitar colisiones en un vehículo en vuelo de acuerdo con la reivindicación 11,
que se caracteriza porque la etapa de proporcionar las órdenes de aceleración forzada al sistema de control de vuelo comprende las etapas de
16. Un procedimiento para evitar colisiones en un vehículo en vuelo de acuerdo con la reivindicación 15,
que se caracteriza porque las órdenes de aceleración se forman a partir de la ecuación ay = - kvc s, en la que ay es la aceleración en una dirección perpendicular a la dirección de desplazamiento y k es una constante positiva.
17. Un procedimiento para evitar colisiones en un vehículo en vuelo de acuerdo con la reivindicación 11,
que se caracteriza por la etapa de comparar una derivada con respecto al tiempo de una línea de visión (s) o una equivalente de la misma con un valor umbral, y si la comparación indica que el valor umbral se ha superado, la etapa de proporcionar las órdenes de aceleración forzada a un sistema de control de vuelo comprende las etapas de:
y si la comparación indica que el valor umbral no se ha supera, la etapa de proporcionar las órdenes de aceleración forzada al sistema de control de vuelo implica la formación de órdenes de aceleración forzada de una magnitud predeterminada.
Patentes similares o relacionadas:
 SISTEMA Y MÉTODO PARA LA IDENTIFICACIÓN DE MANIOBRAS PARA UN VEHÍCULO EN SITUACIONES DE CONFLICTO, del 6 de Junio de 2011, de COMMONWEALTH SCIENTIFIC AND INDUSTRIAL RESEARCH ORGANISATION: Un método de identificación de maniobras para un vehículo en situaciones de conflicto entre el vehículo y por lo menos otro objeto , el método comprende: […]
SISTEMA Y MÉTODO PARA LA IDENTIFICACIÓN DE MANIOBRAS PARA UN VEHÍCULO EN SITUACIONES DE CONFLICTO, del 6 de Junio de 2011, de COMMONWEALTH SCIENTIFIC AND INDUSTRIAL RESEARCH ORGANISATION: Un método de identificación de maniobras para un vehículo en situaciones de conflicto entre el vehículo y por lo menos otro objeto , el método comprende: […]
CONTROL DE TRÁFICO AÉREO, del 22 de Noviembre de 2011, de NATS (EN ROUTE) PUBLIC LIMITED COMPANY: Un sistema de control de tráfico aéreo, para su uso por parte de un controlador que controla una pluralidad de aviones , que comprende un procesador , un dispositivo […]
CONTROL DE TRÁFICO AÉREO, del 22 de Noviembre de 2011, de NATS (EN ROUTE) PUBLIC LIMITED COMPANY: Un sistema de control de tráfico aéreo, para su uso por parte de un controlador que controla una pluralidad de aviones , que comprende un procesador , un dispositivo […]
SISTEMA DE MICRO CAMARAS CON SENSORES DE MOVIMIENTO PARA AYUDA A LA CONDUCCIÓN, del 21 de Enero de 2020, de PALAZZOLO, Umberto: 1. Sistema de micro cámaras con sensores de movimiento para ayuda a la conducción, caracterizado esencialmente, porque está formado por micro cámaras […]
Mejoras aportadas y relativas a los datos de rumbos de navegación y/o de velocidad de un buque, del 15 de Octubre de 2019, de BAE SYSTEMS PLC: Un método para determinar una velocidad de un buque, en donde el buque es una embarcación , ubicada en una zona litoral, que comprende las etapas de: detectar objetos […]
Dispositivo para un vehículo, del 11 de Septiembre de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para medir un posible espacio de estacionamiento (P) mediante un vehículo que pasa al espacio de estacionamiento (P), donde mediante un […]
Aparato de tratamiento de señales para generar un mapa de Alcance-Doppler, del 28 de Agosto de 2019, de AptCore Ltd: Aparato de tratamiento de señales para generar un mapa de alcance-Doppler , comprendiendo el aparato: una unidad de cálculo de transformada […]
Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado y vehículo motorizado, del 31 de Julio de 2019, de AUDI AG: Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado durante su operación, en donde los datos sensoriales registrados por […]