DISPOSITIVO DE DETECCION AUTOCENTRANTE.
La invención refiere a un palpador autocentrable, construido según la reivindicación principal con kinemática paralela.
Con dicho palpador autocentrable se aplica técnicas de la verificación de máquinas de coordenadas con objetos de referencia de esferas también a máquinas herramienta. Estas técnicas son habituales para máquinas de coordenadas, pero no para máquinas herramientas, debido a la falta de palpadores adecuados. Este palpador autocentrable, por medio de por lo menos tres vástagos movibles, se centra automáticamente en las esferas de los objetos de referencia y así mide tres coordenadas a la vez. Existen realizaciones con vástagos del palpador lineales y con vástagos del palpador rotatorios, así como mezclas entre esos dos principios
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/ES03/00110.
Solicitante: IBS PRECISION ENGINEERING B.V.
Nacionalidad solicitante: Países Bajos.
Dirección: ESP 201,5633 AD EINDHOVEN.
Inventor/es: TRAPET,EUGEN,UNIVERSIDAD DE ZARAGOZA, AGUILAR MARTIN,JUAN,J.,UNIVERSIDAD DE ZARAGOZA, SPAAN,HENNY.
Fecha de Publicación: .
Fecha Concesión Europea: 2 de Diciembre de 2009.
Clasificación Internacional de Patentes:
- B23Q1/54B3
- B23Q17/22 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 17/00 Dispositivos para indicar o medir sobre las máquinas herramientas (para el control automático o la regulación del movimiento de avance, de la velocidad de corte o de la posición de la herramienta o de la pieza B23Q 15/00). › para indicar o medir la posición existente o deseada de la herramienta o la pieza de trabajo.
- G01B21/04 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 21/00 Disposiciones de medida o sus detalles en caso de no adaptarse a los tipos particulares de medios de medida de los otros grupos de esta subclase. › mediante la medida de coordenadas de puntos.
- G01B21/04B
Clasificación PCT:
Clasificación antigua:
Fragmento de la descripción:
Dispositivo de detección autocentrante.
La presente invención se refiere a un dispositivo de detección autocentrante tridimensional, basado en un diseño cinemático paralelo, para analizar errores de movimiento relativos entre los componentes de una máquina, usando esferas y para analizar errores en la posición de las máquinas en comparación con objetos de referencia esféricos.
Antecedentes
Los objetos de referencia existen y se usan en forma de placas de bolas y barras de bolas para comprobar la posición de las máquinas de medición por coordenadas (CM). Éstos son muy económicos cuando se usan en las CM. Estos objetos no pueden usarse para controlar máquinas herramientas (TM) en la mayoría de los casos, ya sea porque carecen de un dispositivo de detección o, en muchas TM, del soporte lógico de medición apropiado. Estos problemas se resuelven usando la invención de este documento, es decir, con el desarrollo de un dispositivo de detección específico para ensayos de posición de las TM.
La Solicitud Pública de Patente Alemana DE 199 44 429 describe un dispositivo para obtener parámetros de corrección para las coordenadas de las herramientas de máquinas de producción controladas por CNC, incluyendo un cabezal de medición con una esfera de medición que puede ubicarse en el portaherramientas de la máquina de producción. El dispositivo también incluye un cabezal de medición para acoplarse con la mesa de la máquina, con el banco de la máquina o similares, teniendo dicho cabezal de medición tres tentáculos lineales que pueden desplazarse para ponerse en contacto con la esfera de medición. Los tentáculos de medición como se han descrito se orientan en diferentes direcciones y cada uno de ellos puede desplazarse en la dirección longitudinal para alcanzar variaciones de longitud de los tentáculos de medición que proporcionan, de esta manera, tres señales de medición. Para obtener errores de movimiento relativos y parámetros de corrección para las máquinas de producción controladas por CNC con alta precisión, la construcción del soporte de los tres tentáculos es menos adecuada; la precisión de las mediciones con el dispositivo descrito está limitada. Adicionalmente, el dispositivo descrito en el documento DE 199 44 429 es diferente de la invención, ya que la invención se refiere a un dispositivo para analizar errores de movimiento relativos entre los componentes de la propia máquina.
Problemas y Funciones
El concepto básico de los ensayos de error de posición de máquinas herramientas (TM) con objetos de referencia es que la herramienta se sustituye por un dispositivo de detección, la máquina herramienta (TM) se programa para mover los ejes a las posiciones definidas, poniendo de esta manera el dispositivo de detección en contacto con las esferas de referencia u otros elementos de referencia en el objeto de referencia (este documento trata sólo con esferas de referencia).
Sin embargo, existen varios problemas que evitan que se use el tipo de dispositivos de detección de máquinas de medición de coordenadas (CM) de la técnica anterior. En la mayoría de los casos, no será posible usar un dispositivo de detección dinámico como es muy común en las CM. Este dispositivo de detección da un impulso, cuando toca al objeto, para leer los contadores de posición de la máquina de medición de coordenadas (CM). Su uso no es posible o no es cómodo debido a la ausencia de conexión con el control numérico para la señal del dispositivo de detección y no son posibles las mediciones dinámicas con ejes de movimiento continuos.
Para los ensayos, es apropiado tener un dispositivo de detección que indique simultáneamente la desviación en X, Y, Z, para cada posición programada en la que el dispositivo de detección está en contacto con una esfera de referencia en un objeto de referencia tal como una barra de bolas. Por tanto, se programará fácilmente y los programas se ejecutarán rápidamente, e incluso no será necesario conectar el ordenador o el dispositivo de detección al control numérico de la TM. Todo esto es posible con un dispositivo de detección autocentrante. Este tipo de dispositivo de detección posibilita obtener, al mismo tiempo, el error en la posición en tres coordenadas cuando la TM con este dispositivo de detección se pone sobre una esfera de referencia de una barra de bolas o el equivalente. Las posiciones programadas deben corresponder a las posiciones verdaderas (calibradas) de los centros de las esferas de referencia de la barra de bolas; si no corresponden, tienen que tenerse en cuenta las desviaciones de los valores programados con respecto a los valores calibrados.
Los dispositivos de detección para CM permiten el montaje de puntas de un dispositivo de detección autocentrante en forma de tres bolas o un cono soportado por vástagos móviles lineales.
Solución de acuerdo con la invención
Teniendo en cuenta que no es necesario medir ningún tipo de superficie ni ningún tipo de tipografía, ya que los objetos siempre van a ser esferas de dureza extrema, baja rugosidad y bajo error de forma, el sistema del dispositivo de detección autocentrante está abierto a simplificación y se hace más adecuado para la tarea de autocentrado en esferas de referencia con posiciones relativamente lejanas de las posiciones del dispositivo de detección autocentrante.
Por esta razón, se proporciona un dispositivo de detección autocentrante nuevo e innovador de acuerdo con la reivindicación 1. En este caso, se toma directamente una medición estable sobre la superficie de la esfera de referencia mediante los al menos tres sistemas de los sistemas de medición unidimensionales que constituyen el dispositivo de detección autocentrante tridimensional. El dispositivo de detección autocentrante de acuerdo con la invención proporciona mediciones correctas sin imponer rígidamente la dirección de aproximación de los objetos de referencia esféricos; también, la aproximación de un objeto de referencia esférico a lo largo de una trayectoria de aproximación que no se dirige al centro de un objeto de referencia esférico de acuerdo con la invención, es capaz de compensar dicha aproximación.
De acuerdo con esta invención, el dispositivo de detección autocentrante contiene los siguientes componentes:
Reivindicaciones:
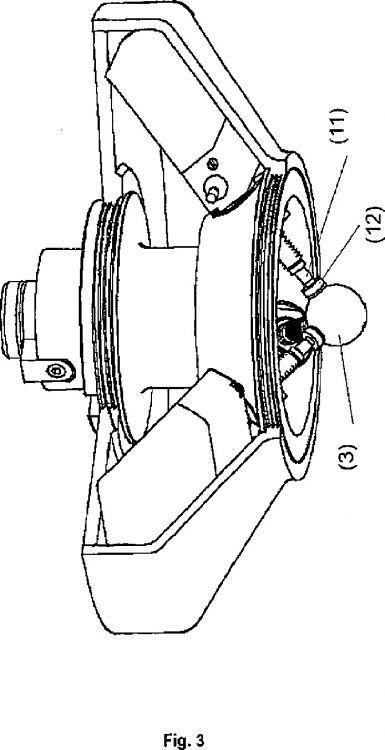
1. Dispositivo de detección autocentrante tridimensional para analizar errores de movimiento relativos entre los componentes de una máquina, usando esferas (3, 33) y para analizar los errores en la posición de máquinas en comparación con los objetos de referencia esféricos (3, 33);
caracterizado porque los vástagos (11) están conectados independientemente de forma móvil a un cuerpo con forma de cono truncado del dispositivo de detección autocentrante.
2. Dispositivo de detección autocentrante de acuerdo con la reivindicación 1, caracterizado porque cada uno de los al menos tres vástagos (11) tiene una punta (12) del dispositivo de detección esférica, cilíndrica o plana, siendo capaces también estos vástagos (11) de moverse libremente a lo largo de sus guías lineales (13).
3. Dispositivo de detección autocentrante de acuerdo con la reivindicación 2, caracterizado por un modelo con al menos uno de los siguientes parámetros:
parámetros que se almacenan en un ordenador para calcular los desplazamientos relativos de la esfera de referencia (3, 33) con relación al dispositivo de detección autocentrante en base a las posiciones medidas por dichos sensores de desplazamiento (16, 17).
Patentes similares o relacionadas:
 Dispositivo de alineación para herramientas de torneado, del 29 de Julio de 2020, de GÜHRING KG: Dispositivo de alineación para disponer sobre una herramienta de torneado, , en particular sobre un vástago de herramienta o una punta […]
Dispositivo de alineación para herramientas de torneado, del 29 de Julio de 2020, de GÜHRING KG: Dispositivo de alineación para disponer sobre una herramienta de torneado, , en particular sobre un vástago de herramienta o una punta […]
Dispositivo de mandril y método, del 18 de Marzo de 2020, de In-Situ Oilfield Services Limited: Un dispositivo de mandril que tiene al menos dos mandíbulas para agarrar un objeto (T), y un mecanismo de ajuste configurado para ajustar el centro rotacional […]
Procedimiento para el mecanizado de los bordes de piezas de trabajo en forma de placa, del 19 de Febrero de 2020, de IMA Schelling Deutschland GmbH: Procedimiento para el mecanizado de los bordes de piezas de trabajo en forma de placa, donde las piezas de trabajo se suministran en un circuito […]
Aparato seguidor del contorno y sistemas y métodos relacionados, del 1 de Enero de 2020, de FLOW INTERNATIONAL CORPORATION: Un conjunto de cardan para una máquina multieje para ayudar al mantenimiento de una relación espacial entre una herramienta de la máquina multieje y una […]
Accesorio de centrado de útiles sobre una máquina de mecanizado, procedimiento de centrado y dispositivo de ayuda para el centrado que incluye tal accesorio, del 20 de Noviembre de 2019, de Wibemo S.A: Accesorio de centrado de un útil (O) o de un husillo porta-útiles sobre un eje de rotación X-X` de un cañón giratorio de una máquina de mecanizado, caracterizado […]
Módulo de mecanización, conjunto de accesorio para módulo de mecanización, y procedimiento de puesta en marcha de un módulo de mecanización, del 9 de Octubre de 2019, de Watch Out SA: Conjunto de accesorios para módulo de mecanización por arrancado de virutas, que comprende: por lo menos un portaherramientas provisto de una […]
Procedimiento y dispositivo para detectar y corregir una ubicación espacial de una pieza de trabajo sostenida en un dispositivo de posicionamiento, del 4 de Septiembre de 2019, de JENOPTIK AUTOMATISIERUNGSTECHNIK GMBH: Procedimiento para detectar y corregir una ubicación espacial de una pieza de trabajo no simétrica en rotación sostenida en un dispositivo de posicionamiento […]
 Dispositivo y procedimiento para la sincronización del movimiento de un medio de mecanizado automático con el movimiento de una pieza de trabajo, del 31 de Julio de 2019, de SIEMENS AKTIENGESELLSCHAFT: Dispositivo para la sincronización del movimiento de un medio de mecanizado automático (BM) con el movimiento de una pieza de trabajo (WS) transportada durante el mecanizado […]
Dispositivo y procedimiento para la sincronización del movimiento de un medio de mecanizado automático con el movimiento de una pieza de trabajo, del 31 de Julio de 2019, de SIEMENS AKTIENGESELLSCHAFT: Dispositivo para la sincronización del movimiento de un medio de mecanizado automático (BM) con el movimiento de una pieza de trabajo (WS) transportada durante el mecanizado […]