PROCEDIMIENTO DE DETECCION Y DE SEGUIMIENTO DE BLANCOS PUNTUALES, EN UN SISTEMA DE VIGILANCIA OPTRONICO.
Procedimiento de tratamiento de imágenes optrónico, para asegurar la detección de blancos puntuales y el seguimiento de la pista de cada blanco detectado en las indicadas imágenes,
mediante creación y validación de pistas hipótesis a partir de puntos detectados en una imagen observada, comprendiendo una pista hipótesis al menos un punto detectado, comprendiendo el mencionado procedimiento para cada imagen observada,
una etapa de detección (4) de puntos en la imagen, que comprende
una partición de la imagen observada en una pluralidad de zonas homogéneas, siendo una zona homogénea una zona sobre la cual se comprueba un criterio de uniformidad definido por una función de distribución radiométrica determinada,
el cálculo para cada píxel de la imagen observada de una relación entre señal y ruido (RSB) correspondiente con relación a la zona homogénea en la cual se encuentra el indicado píxel, y la comparación de la relación entre señal y ruido calculada con un umbral de detección (thd), tal que se detecta un punto para un píxel de la imagen si la relación entre señal y ruido calculada para este píxel es superior o igual al indicado umbral de detección,
y para cada punto detectado, la determinación de un conjunto (Ek) de umbrales de comparación asociado con dicho punto, comprendiendo el mencionado conjunto una o más pluralidades de umbrales, siendo los indicados umbrales de comparación superiores o iguales al mencionado umbral de detección (thd),
una etapa de validación de pistas hipótesis que comprende para cada punto detectado, una etapa de aplicación de un criterio de validación de la pista hipótesis asociada con dicho punto, siendo el indicado criterio de validación función de los umbrales de comparación asociados con cada uno de los puntos de la pista hipótesis
Tipo: Resumen de patente/invención. Número de Solicitud: W05054670EP.
Solicitante: THALES.
Nacionalidad solicitante: Francia.
Dirección: 45 RUE DE VILLIERS,92200 NEUILLY SUR SEINE.
Inventor/es: KLEIN,YVES, MEGAIDES,VINCENT, VAN PUYMBROECK LEMPERIERE,NADEGE.
Fecha de Publicación: .
Fecha Concesión Europea: 11 de Noviembre de 2009.
Clasificación Internacional de Patentes:
- G06K9/32R1
- G06K9/46B1
- G06T7/20C
Clasificación PCT:
- G06T7/20 FISICA. › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › G06T 7/00 Análisis de imagen. › Análisis del movimiento (estimación del movimiento para codificación, decodificación, compresión o descompresión de señales de vídeo digitales H04N 19/43, H04N 19/51).
Clasificación antigua:
- G06T7/20 G06T 7/00 […] › Análisis del movimiento (estimación del movimiento para codificación, decodificación, compresión o descompresión de señales de vídeo digitales H04N 19/43, H04N 19/51).
Fragmento de la descripción:
Procedimiento de detección y de seguimiento de blancos puntuales, en un sistema de vigilancia optrónico.
La presente invención se refiere a un procedimiento de detección y de seguimiento de blancos puntuales, en un sistema de vigilancia optrónico, basado en las observaciones de imágenes proporcionadas por sensores optrónicos, por ejemplo sensores de infrarrojos. La invención se refiere más particularmente a un procedimiento de asociación de puntos singulares y de creación de pistas particularmente adaptado para la vigilancia optrónica sectorial o panorámica a gran velocidad.
En un sistema de vigilancia optrónico, el tratamiento digital de las imágenes tiene por objeto extraer la señal útil que puede corresponder a una amenaza en una escena vigilada y realizar un seguimiento espacial y temporal de esta eventual amenaza. Comprende así particularmente un módulo de detección, que permite extraer puntos singulares, denominados "plots" (representación gráfica), de la escena optrónica observada y un módulo de seguimiento que permite asociar entre sí puntos extraídos, sobre criterios espaciales y temporales: Un conjunto de puntos observados en diferentes momentos y asociados por el módulo de seguimiento, se denomina pista. Cada pista representa un blanco potencial (un objeto real).
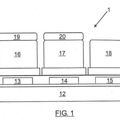
Un ejemplo de un sistema de vigilancia optrónico de este tipo se ilustra en la figura 1. Está compuesto por sensor(es) optrónico(s) 1 que permite(n) cubrir el campo de la escena 2 a observar. Este(os) sensor(es) optrónico(s) proporcio-na(n) a intervalos de tiempo regulares, por medio de un enlace de datos, imágenes DataIN de la escena de observación 2 en un calculador 3 de tratamiento digital de señal. Este calculador aplica en tiempo real funciones algorítmicas sobre estas imágenes.
Además de los algoritmos de tratamiento de las imágenes propiamente dichas (filtrado, restauración de píxeles defectuosos...) que son habitualmente previstos, las funciones algorítmicas realizadas en tiempo real por el calculador 3 se dividen en dos módulos principales, un módulo 4 de detección y un módulo 5 de seguimiento.
Se sitúa más particularmente dentro del marco de la búsqueda de una amenaza cuya superficie y distancias de aparición son tales que deberían producir una mancha óptica sobre el sensor optrónico del tamaño de un píxel. En este contexto, las funciones algorítmicas de los módulos de detección y de seguimiento están definidas para blancos puntuales, es decir que corresponden a un píxel de la imagen. En el caso en que un blanco correspondiese a varios píxeles de la imagen, funciones de reducción (zoom hacia atrás) se utilizan localmente, en el módulo de detección, para volver de nuevo al caso de un blanco puntual. Estas particularidades de tratamiento de imagen bien conocidas del experto en la materia no forman parte de la invención propiamente dicha, y no se detallarán por consiguiente aquí.
En el con texto precisado de búsqueda de blancos puntuales, los tratamientos realizados por el calculador 3 en tiempo real pueden organizarse del modo siguiente:
- - El módulo de detección 4 recibe imágenes optrónicas de la escena observada proporcionadas por el(los) sensor(es) optrónico(s) 1, generalmente pre-filtradas. A partir de una imagen optrónica de observación DATAIN aplicada a la entrada, en la entrada, se extrae de esta imagen el conjunto de puntos que pueden corresponder espacial y radiométricamente a una amenaza, correspondiendo un punto a un píxel (blanco puntual).
- - El módulo de seguimiento 5 tiene por objeto proporcionar a un sistema de orden superior, tal como una interfaz hombre-máquina o un sistema de armas, informaciones sobre una amenaza potencial detectada, llamada pista.
La creación de pistas consiste en resolver el problema siguiente:
Cuáles son los puntos detectados procedentes de imágenes observadas sucesivas que tienen un origen común, es decir una misma fuente en movimiento?. Así, en la práctica, se definirá una pista como un conjunto de puntos asociados en el tiempo. De este conjunto de puntos, se deduce un comportamiento cinemático del blanco, que permite particularmente predecir su desplazamiento en la escena observada.
Más particularmente, el módulo 4 de detección se basa habitualmente en un análisis de la imagen. Más precisamente, el módulo de detección puede por ejemplo proceder a un análisis local del ruido observado en la imagen (incluyendo el ruido propio del sensor y el ruido de la escena propiamente dicho) para extraer los puntos cuya relación señal - ruido sobrepase un cierto umbral. A cada punto así extraído se asocia un cierto número de características o atributos, como, por ejemplo, su posición angular y su nivel de señal (nivel radiométrico).
La utilización de sensores optrónicos más recientes, permite un análisis de las características espaciales y/o espectrales de la imagen (según el tipo de informaciones proporcionadas por el sensor). Así, es posible asociar con cada punto, informaciones sobre la distribución espacial y espectral del fondo del cual el punto ha sido extraído. Se prevé para ello un módulo de descomposición de la imagen que tiene por objeto identificar las diferentes partes de la imagen que pueden presentar caracteres de homogeneidad, reagruparlas en zonas homogéneas determinar las características de cada zona, en particular, un nivel de ruido medio sobre la zona y una diferencia tipo. Se trata de informaciones que serán seguidamente utilizadas para calcular en cada punto (pixel) de la imagen, la relación entre señal y ruido en este punto, indicada con la porción de imagen correspondiente a la zona homogénea en la cual se encuentra este punto.
El módulo de cálculo de la relación entre señal y ruido en un pixel dado utiliza las características de la zona homogénea Zi asociada que caracteriza el fondo local del píxel considerado: nivel mZi de ruido medio
Más precisamente, el cálculo de la relación entre señal y ruido RSB en un punto de la imagen consiste en realizar el cálculo siguiente:

donde S es el nivel de la señal radiométrica (es decir el nivel de gris) del pixel considerado, y mZi y
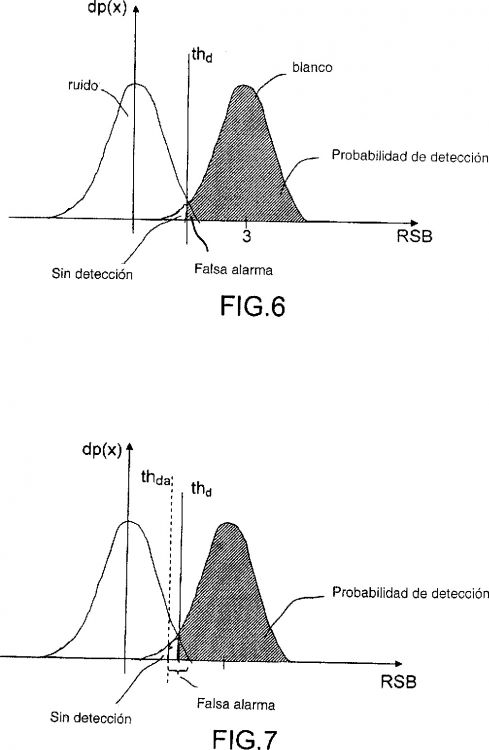
La relación entre señal y ruido RSB calculada en cada píxel de la imagen observada se compara con un umbral de detección predeterminado thd, para discriminar los puntos para los cuales se tiene RSB=thd. Los puntos que verifican esta relación son los puntos detectados. Estos puntos detectados pueden corresponder bien sea a objetos contrastados de la escena, o a píxeles viciados de ruido.
En la práctica, el umbral de detección predeterminado thd se calcula de forma que garantice un par de probabilidades dado de detección y de falsas alarmas para un píxel que presenta una relación entre señal y ruido igual a la de un blanco en límite de alcance. Este valor depende en la práctica del blanco que se desea detectar y del alcance requerido para este blanco.
A la salida del módulo de detección, se proporcionan datos de salida DETOUT. Estos datos de salida DETOUT del módulo de detección se aplican a la entrada del módulo de seguimiento.
Es lo que se ha representado de forma esquemática en la figura 2. Al término de la etapa de descomposición de la imagen y de búsqueda de los puntos, se obtienen puntos detectados pl1, pl2, pl3 para cada uno de los cuales la relación entre señal y ruido RSB calculada en la zona homogénea Zi asociada es superior al umbral de detección thd.
Al inicio de esta tapa, el módulo 4 de detección transmite al módulo 5 de seguimiento datos DETOUT que comprenden la lista de los puntos detectados, con para cada punto, sus atributos respectivos, particularmente: posición del punto en la imagen, nivel radiométrico del punto S, media de las señales radiométricas sobre la zona homogénea Zi asociada con el punto, diferencia tipo de las señales radiométricas sobre esta zona homogénea...
Reivindicaciones:
1. Procedimiento de tratamiento de imágenes optrónico, para asegurar la detección de blancos puntuales y el seguimiento de la pista de cada blanco detectado en las indicadas imágenes, mediante creación y validación de pistas hipótesis a partir de puntos detectados en una imagen observada, comprendiendo una pista hipótesis al menos un punto detectado, comprendiendo el mencionado procedimiento para cada imagen observada,
una etapa de detección (4) de puntos en la imagen, que comprende
una partición de la imagen observada en una pluralidad de zonas homogéneas, siendo una zona homogénea una zona sobre la cual se comprueba un criterio de uniformidad definido por una función de distribución radiométrica determinada,
el cálculo para cada píxel de la imagen observada de una relación entre señal y ruido (RSB) correspondiente con relación a la zona homogénea en la cual se encuentra el indicado píxel, y la comparación de la relación entre señal y ruido calculada con un umbral de detección (thd), tal que se detecta un punto para un píxel de la imagen si la relación entre señal y ruido calculada para este píxel es superior o igual al indicado umbral de detección,
y para cada punto detectado, la determinación de un conjunto (Ek) de umbrales de comparación asociado con dicho punto, comprendiendo el mencionado conjunto una o más pluralidades de umbrales, siendo los indicados umbrales de comparación superiores o iguales al mencionado umbral de detección (thd),
una etapa de validación de pistas hipótesis que comprende para cada punto detectado, una etapa de aplicación de un criterio de validación de la pista hipótesis asociada con dicho punto, siendo el indicado criterio de validación función de los umbrales de comparación asociados con cada uno de los puntos de la pista hipótesis.
2. Procedimiento según la reivindicación 1, caracterizado porque la indicada etapa de determinación de umbrales de comparación asociados con un punto es función del fondo local definido por la zona homogénea sobre el cual se ha detectado el indicado punto.
3. Procedimiento según la reivindicación 1 ó 2, caracterizado porque la indicada etapa de determinación de umbrales de comparación asociados con un punto comprende la determinación de un umbral de comparación aplicable en función de un número i de puntos de la pista hipótesis sobre los cuales se aplica el criterio de validación.
4. Procedimiento según la reivindicación 3, caracterizado porque si la pista hipótesis comprende p puntos, el criterio de validación consiste en comprobar si existen i puntos, i=1 en p, tales que para cada punto entre los i puntos, la relación entre señal y ruido (RSB) sea superior que el umbral de comparación aplicable para i puntos.
5. Procedimiento según una cualquiera de las reivindicaciones 1 a 4, caracterizado porque comprende para cada zona homogénea (Zi) de la imagen, el cálculo de una media (mZi) y una diferencia tipo ( dado por donde S es el nivel de la señal radiométrica del píxel considerado.
dado por donde S es el nivel de la señal radiométrica del píxel considerado.
6. Procedimiento según una cualquiera de las reivindicaciones 1 a 5, caracterizado porque la partición de la imagen en zonas homogéneas comprende la aplicación de una etapa de determinación de una zona homogénea (Zi) para cada píxel de la imagen observada, correspondiente a una búsqueda de una zona de la imagen que es la más grande posible alrededor del píxel, aparte del píxel, sobre la cual se comprueba el indicado criterio de uniformidad de distribución radiométrica, siendo la indicada zona homogénea (Zi) así definida denominada la mayor zona de proximidad alrededor de dicho píxel.
7. Procedimiento según la reivindicación 6, caracterizado porque la indicada etapa de determinación de la mayor zona de proximidad alrededor de dicho píxel, aplica una modelización por tamaño TFk de ventana, correspondiente a un nivel de complejidad k de fondo local, comprendiendo la mencionada modelización la definición de t tamaños de ventana, consistiendo la determinación de la indicada mayor zona de proximidad alrededor de un píxel en determinar el tamaño más grande de ventana sobre la cual se comprueba el indicado criterio de uniformidad, y la definición de un criterio de complejidad k de fondo local asociado con cada tamaño de ventana, variando k de 1 en t, tal que es igual a 1 para la ventana de tamaño más grande y en t para la ventana de tamaño más pequeño, y porque en cada punto detectado se asocia el nivel de complejidad k correspondiente al tamaño de ventana TFk de la indicada zona más grande de proximidad así determinada.
8. Procedimiento según la reivindicación 7, caracterizado porque un conjunto de umbrales de comparación (Ek) se determina
9. Procedimiento según la reivindicación 8, caracterizado porque cada conjunto de umbrales de comparación (Ek) define, para un número q de observaciones actuales, un subconjunto de q umbrales de comparación thi,q,k i=1 a q, con th1,q,k>th2,q,k>th3,q,k,....>thi,q,k>...>thq,q,k.
10. Procedimiento según la reivindicación 9, caracterizado porque consiste, cuando un pº punto de una pista hipótesis PH ha sido detectado en la qª observación:
- - en los conjuntos de umbrales de comparación (Ek) indexados por los niveles de complejidad k asociados con los p puntos de la pista hipótesis (PHi), en seleccionar los subconjuntos en función del número q de observaciones;
- - en inicializar un bucle de comparación con i=1, consistiendo este bucle en las etapas siguientes:
11. Procedimiento según una cualquiera de las reivindicaciones anteriores, que comprende una etapa de predicción de una posición de un punto de una pista en la imagen observada siguiente, comprendiendo la indicada predicción, la predicción de una zona homogénea asociada.
12. Procedimiento según la reivindicación precedente, en el caso en que ningún punto sea detectado en la imagen observada actual para una pista hipótesis dada, el procedimiento comprende una etapa de comparación del número p de puntos de una pista hipótesis y de un número q de observaciones realizadas desde el primer punto asociado con la indicada pista hipótesis, con valores óptimos predefinidos, respectivamente un número máximo de puntos P a comparar con el valor p y un número máximo de observaciones Q a comparar con el valor q, para validar la indicada pista hipótesis en función de la diferencia a los indicados valores óptimos y en función del nivel de complejidad k asociado con la zona de predicción de posición de punto en la imagen actual.
13. Procedimiento según la reivindicación 11 ó 12, que comprende una etapa suplementaria de asociación de puntos a una pista validada (PVi), donde en el caso en que ningún punto sea detectado en la imagen observada actual para una pista validada (PVi) dada, la indicada etapa comprende el control del umbral de detección en la etapa de detección (4), para adaptarlo localmente en función del nivel de complejidad k asociado con una zona de predicción de posición de punto para la pista validada considerada.
14. Sistema de vigilancia optrónico que comprende una o varias pluralidades de sensores optrónicos aptos para proporcionar imágenes de observación de una escena, comprendiendo el sistema medios de tratamiento de las indicadas imágenes que ponen en práctica un procedimiento según una cualquiera de las reivindicaciones precedentes.
Patentes similares o relacionadas:
 SISTEMA Y METODO DE CAPTURA EN PARALELO DE IMAGENES, del 29 de Noviembre de 2010, de QUALITY INFORMATIONS SYSTEMS, S.A: Sistema de captura en paralelo de imágenes que comprende, al menos:unos primeros medios de captura de imágenes , fijados de forma solidaria mediante […]
SISTEMA Y METODO DE CAPTURA EN PARALELO DE IMAGENES, del 29 de Noviembre de 2010, de QUALITY INFORMATIONS SYSTEMS, S.A: Sistema de captura en paralelo de imágenes que comprende, al menos:unos primeros medios de captura de imágenes , fijados de forma solidaria mediante […]
SISTEMA Y PROCEDIMIENTO PARA EL SEGUIMIENTO DE UN OBJETIVO EN UN VIDEO E INFORMACIÓN RELACIONADA CON EL MISMO, del 23 de Diciembre de 2011, de CREATIVE FRONTIER, INC: Procedimiento implementado por ordenador para el seguimiento automático de un objeto de píxeles o vídeo en una serie de fotogramas de vídeo en un modo de desarrollo, […]
 SISTEMA Y PROCEDIMIENTO DE EVALUACION DE IMAGENES, del 15 de Julio de 2010, de SEISMA AG: Sistema de evaluación de imágenes para la evaluación de datos de la imagen, que corresponden a una región de la imagen a supervisar, donde la […]
SISTEMA Y PROCEDIMIENTO DE EVALUACION DE IMAGENES, del 15 de Julio de 2010, de SEISMA AG: Sistema de evaluación de imágenes para la evaluación de datos de la imagen, que corresponden a una región de la imagen a supervisar, donde la […]
Desplazamiento de inhibición de un dispositivo recargable inalámbricamente, del 26 de Febrero de 2020, de TELEFONAKTIEBOLAGET LM ERICSSON (PUBL): Un método para inhibir el desplazamiento de un dispositivo recargable inalámbricamente posicionado en una superficie de carga subyacente […]
Sistemas y métodos de seguimiento de objetos asociativos, del 8 de Enero de 2020, de Isolynx, LLC: Un aparato de seguimiento asociativo para seguir un primer objeto (402 , 1206) usando información de seguimiento para el primer objeto (402 , 1206) e información […]
Procedimiento de estimación de flujo óptico a partir de un sensor de luz asíncrono, del 18 de Diciembre de 2019, de Sorbonne Université: Procedimiento de estimación de flujo óptico, que comprende: - recibir información asíncrona proveniente de un sensor de luz que tiene una matriz de píxeles dispuestos […]
Metrología en vivo de un objeto durante la fabricación u otras operaciones, del 21 de Agosto de 2019, de THE BOEING COMPANY: Un método para metrología en vivo de un objeto, que comprende: realizar una operación de escaneado mediante una pluralidad de sensores para […]
Procedimiento y dispositivo para la detección de objetos en movimiento en una secuencia de imágenes de vídeo, del 19 de Junio de 2019, de Airbus Defence and Space GmbH: Procedimiento para la detección de objetos en movimiento en una secuencia de imágenes de vídeo que comprende los pasos de: a) determinación de […]