ROBOT INDUSTRIAL.
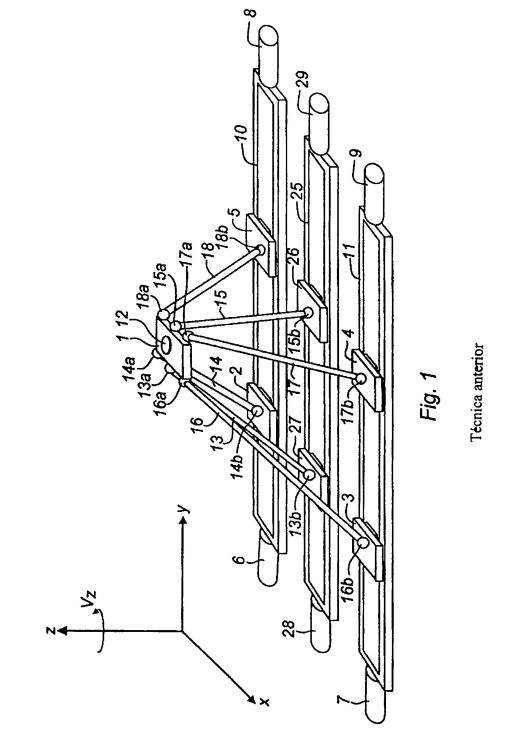
Un robot industrial para movimiento de un objeto (12) en un espacio que comprende una plataforma (1) dispuesta para soportar objetos,
un primer brazo adaptado para influir sobre la plataforma en un primer movimiento y que comprende un primer actuador con un primer carro (2) móvil linealmente y dos eslabones (13, 14), cada uno de los cuales comprende una pieza de unión exterior (13a, 14a) dispuesta en la plataforma y una pieza de unión interior (13b, 14b) dispuesta en el primer carro (2), donde las dos piezas de unión interiores (13b, 14b) están dispuestas de forma desplazable en paralelo, un segundo brazo dispuesto para influir sobre la plataforma en un segundo movimiento y que comprende un segundo actuador con un segundo carro (4) móvil linealmente y dos eslabones (17, 18), cada uno de los cuales comprende una pieza de unión exterior (17a, 18a) dispuesta en la plataforma y una pieza de unión interior (17b, 18b) dispuesta en el segundo carro (4), donde las dos piezas de unión interiores (17b, 18b) están dispuestas de forma desplazable en paralelo, y un tercer brazo dispuesto para influir sobre la plataforma en un tercer movimiento y que comprende un tercer actuador con un tercer carro (3) móvil linealmente y un eslabón (16), que comprende una pieza de unión exterior (16a) dispuesta en la plataforma (1) y una pieza de unión interior (16b) dispuesta en el tercer carro (3), donde la pieza de unión interior (16b) está dispuesta desplazable linealmente, caracterizado porque el primer brazo comprende un eslabón adicional (15) con una pieza de unión interior (15b) dispuesta en el primer carro (2) y una pieza de unión exterior (15a) dispuesta en la plataforma (1), de manera que todos los eslabones (13, 14, 15) del primer brazo están dispuestos en paralelo y las tres piezas de unión interiores (13b, 14b, 15b) en el primer carro (2) están dispuestas de forma desplazable en paralelo.
Tipo: Resumen de patente/invención.
Solicitante: ABB AB.
Nacionalidad solicitante: Suecia.
Dirección: S-721 83 VASTER S,.
Inventor/es: BROG RDH, TORGNY.
Fecha de Publicación: .
Fecha Concesión Europea: 8 de Abril de 2009.
Clasificación PCT:
- B23Q1/54 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 1/00 Elementos componentes de la estructura general de un tipo de máquina, y más especialmente los elementos fijos más grandes (B23Q 37/00 tiene prioridad). › con sólo dos pares de rotación.
- B25J17/02 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 17/00 Uniones. › Uniones articuladas.
- B25J9/10 B25J […] › B25J 9/00 Manipuladores de control programado. › caracterizado por los medios para regular la posición de los elementos del manipulador.
- B66C5/04 B […] › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 5/00 Estructuras de columnas que soportan la base. › llevando vías o caminos de rodadura que permiten los desplazamientos en relación al puente o al pórtico.
Patentes similares o relacionadas:
Máquina herramienta, del 11 de Marzo de 2020, de Hüttmann, Martin: Máquina herramienta para el mecanizado de piezas de trabajo controlado por ordenador, con un soporte de máquina y al menos dos dispositivos […]
Amortiguador de masa ajustado montado sobre cabezal simétrico, del 27 de Noviembre de 2019, de Fives Machining Systems, Inc: Un amortiguador de masa ajustado montado en un cabezal de máquina herramienta , montado sobre el extremo de un brazo que tiene una […]
Máquina herramienta para la mecanización por arranque de virutas de una pieza de trabajo así como conjunto de soporte de husillo para el empleo en una máquina herramienta de este tipo, del 6 de Noviembre de 2019, de DECKEL MAHO PFRONTEN GMBH: Conjunto de soporte de husillo para el empleo en una máquina herramienta, con: - una sección de alojamiento del brazo articulado que se puede disponer o bien […]
Cabezal de mecanización de giro doble, del 26 de Marzo de 2019, de C.M.S. S.P.A.: Cabezal de mecanización de giro doble con dos ejes controlados (C; A), que comprende: - una primera unidad de control de un primer […]
Máquina herramienta con sistema de amortiguación activa, del 6 de Febrero de 2019, de SORALUCE, S. COOP: Máquina herramienta con sistema de amortiguación activa, comprendiendo • un carnero que tiene una estructura prismática hueca con unas paredes longitudinales […]
 Máquina herramienta que comprende un cabezal de mecanizado, del 27 de Diciembre de 2018, de BRETON, S.P.A.: Máquina herramienta que comprende un manguito y un cabezal de mecanizado , comprendiendo dicho cabezal de mecanizado:
un primer cuerpo conectado al manguito […]
Máquina herramienta que comprende un cabezal de mecanizado, del 27 de Diciembre de 2018, de BRETON, S.P.A.: Máquina herramienta que comprende un manguito y un cabezal de mecanizado , comprendiendo dicho cabezal de mecanizado:
un primer cuerpo conectado al manguito […]
Manipulador de baja inercia para máquinas de corte láser para metales laminares planos, del 28 de Marzo de 2018, de SALVAGNINI ITALIA S.P.A.: Máquina de corte láser para metales laminares planos dispuestos en un plano horizontal, que comprende un cabezal de corte láser y un manipulador con un eje X de movimiento […]
Dispositivo para proporcionar aparatos de sujeción y/o de mecanizado y sistema, del 21 de Febrero de 2018, de ThyssenKrupp System Engineering GmbH: Dispositivo para proporcionar aparatos de sujeción y/o de mecanizado para un manipulador, en particular en una calle de fabricación para la fabricación de carrocerías […]