UN SISTEMA ELECTRONICO FOTO-OPTICO PARA RECONOCER, DIGITALIZAR Y REPRODUCIR LA SUPERFICIE EXTERNA DE UN OBJETO TRIDIMENSIONAL, EN FORMA VIRTUAL O EN MATERIAL PLASTICO, COMPUESTO O SIMILAR AL PAPEL.
Un sistema electrónico foto-óptico para reconocer, digitalizar y reproducir la superficie externa de un objeto tridimensional,
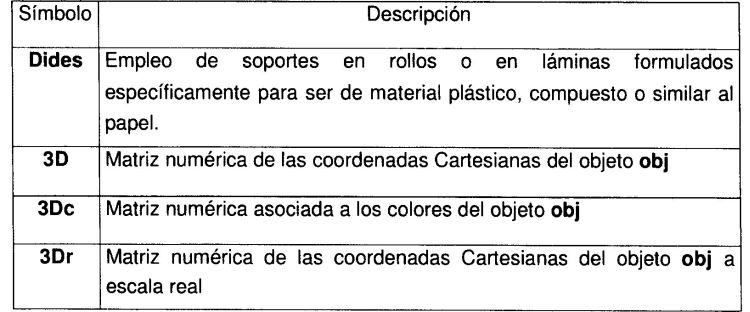
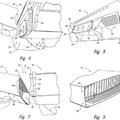
en forma virtual o en material plástico, compuesto o similar al papel, y que se compone de un módulo integrado para calcular y gestionar datos informáticos, un módulo de escaneo y un módulo de reproducción; el mencionado módulo de cálculo integrado está adaptado para describir la lógica matemática utilizada en el soporte físico del módulo de escaneo; (1) y el módulo de reproducción (2) i) el mencionado módulo de escaneo (1) está adaptado para reconocer, mediante el uso de una cámara digital o sistema digital de obtención y reconocimiento de imágenes, una secuencia de imágenes del objeto a ser escaneado asociada a una proyección secuencial consecutiva y sincronizada, con posiciones y movimientos siguiendo pasos predeterminados, de un haz de luz lineal proyectado en paralelo al plano (x, y) sobre el cual se coloca el objeto y que ilumina la superficie del objeto a ser reconocido; ii) el mencionado módulo de cálculo integrado está adaptado para procesar la información obtenida según el apartado i) antes mencionado y reproducir las matemáticas que describen la geometría de la superficie externa del objeto reconocido y tomado como modelo, generando las coordenadas espaciales de dicho objeto según un sistema de referencia Cartesiano de tres ejes (x, y, z) como lógica del módulo de cálculo integrado; iii) los medios para transmitir la información matemática obtenida, como se describe en los apartados i) y ii) antes mencionados, a un ordenador para una reproducción virtual del objeto reconocido, programas específicos adaptados para poner la mencionada información matemática a disposición de los sistemas CAD en 3D con el objeto de posibilitar la realización de operaciones de modificación; iv) medios para transferir a una estación remota la información matemática obtenida como se detalla en los apartados i), ii) y ii) antes mencionados, en donde el mencionado módulo de reproducción (2) está adaptado para reproducir una copia en plástico, material compuesto o similar al papel de la superficie externa del objeto reconocido mediante el módulo de escaneo (1) o la superficie externa de un objeto virtual generado mediante el uso de un ordenador, los programas específicos adaptados para poner la mencionada información matemática a disposición de un archivo de dato 3Dr, 3Drrt y 3Dc desde un archivo CAD 3D, según la lógica indicada por el módulo integrado de cálculo, donde el mencionado 3Dr es una matriz numérica de coordenadas Cartesianas del objeto a escala real, el mencionado 3Drrt es una matriz numérica que describe la geometría del objeto en el sistema radial con información de corte de plantillas, y 3Dc es una matriz numérica asociada con los colores del objeto; v) el mencionado módulo de reproducción (2) se encuentra adaptado para imprimir colores sobre la superficie externa del objeto a ser reproducido en plástico, material compuesto o similar al papel mediante el uso de un formato de archivo de datos 3Dc, según la lógica indicada por el módulo de cálculo integrado.
Tipo: Resumen de patente/invención.
Solicitante: BERTOLA, PAOLO.
Nacionalidad solicitante: Italia.
Dirección: VIA VITTORIO EMANUELE II 21,INTROBIO LC.
Inventor/es: BERTOLA,PAOLO, JULITA,FRANCESCA.
Fecha de Publicación: .
Fecha Concesión Europea: 16 de Abril de 2008.
Clasificación PCT:
- G05B19/4099 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Mecanizado de superficie o de curva, fabricación de objetos en tres dimensiones (3D), p. ej. fabricación asistida por computador.
- G05B19/42 G05B 19/00 […] › Sistemas de registro y de reproducción, es decir, en los que el programa es registrado a partir de un ciclo de operaciones, p. ej. el ciclo de operaciones está controlado a mano, y a continuación este registro es reproducido en la misma máquina.
Patentes similares o relacionadas:
 Métodos y sistemas de unión ala-fuselaje, del 29 de Enero de 2020, de THE BOEING COMPANY: Un metodo de union ala-fuselaje para una aeronave , comprendiendo el metodo:
(a) calcular un ajuste virtual entre un conjunto […]
Métodos y sistemas de unión ala-fuselaje, del 29 de Enero de 2020, de THE BOEING COMPANY: Un metodo de union ala-fuselaje para una aeronave , comprendiendo el metodo:
(a) calcular un ajuste virtual entre un conjunto […]
SISTEMA Y DISPOSITIVO DE ILUMINACIÓN POR LED, del 24 de Mayo de 2019, de BREBENEL, Nicolae: Un dispositivo, sistema, proceso y método de fabricación que utiliza al menos dos fuentes de iluminación por led para proporcionar módulos de componentes auxiliares. […]
Conformación de componentes utilizando ingeniería inversa, del 21 de Febrero de 2019, de THE BOEING COMPANY: Un método para conformar componentes, que comprende: medir un primer componente con un miembro de medición , estando el miembro de medición […]
Sistema y método para procesar una pieza de trabajo, del 8 de Febrero de 2019, de PEDDINGHAUS CORPORATION (100.0%): Un sistema para procesar una pieza de trabajo , comprendiendo dicho sistema : (A) una superficie de soporte para soportar una pieza […]
Aparato para y método de marcado de estructura precisa y localización de marcado de estructura asistida, del 14 de Febrero de 2018, de THE BOEING COMPANY: Un sistema de marcado por láser que comprende: una fuente de láser configurada para emitir un haz de láser; un conjunto de dirección configurado […]
Célula robotizada, instalación y método para eliminar rebabas de piezas, del 8 de Febrero de 2017, de Getting Robotika S.L: Una célula robotizada para eliminar rebabas o excesos de material en piezas de gran tamaño con al menos una superficie curva, que comprende una base y un […]
Sistema de visualización de dientes, del 5 de Octubre de 2016, de ALIGN TECHNOLOGY, INC.: Un método implementado en ordenador para presentar una vista para ortodoncia de los dientes de un paciente, comprendiendo el método: obtener un conjunto […]
 Control de la trayectoria de un robot que incluye un sistema y un método de vía de evacuación de emergencia, del 17 de Junio de 2013, de KUKA Laboratories GmbH: Proceso para controlar un recorrido de un robot (R) durante una evacuación de emergencia desde un recorridoprincipal , comprendiendo el proceso: proporcionar […]
Control de la trayectoria de un robot que incluye un sistema y un método de vía de evacuación de emergencia, del 17 de Junio de 2013, de KUKA Laboratories GmbH: Proceso para controlar un recorrido de un robot (R) durante una evacuación de emergencia desde un recorridoprincipal , comprendiendo el proceso: proporcionar […]