MAQUINA PARA SEPARAR UN NUMERO DESEADO DE CHAPAS METALICAS DE UN PAQUETE MAESTRO.
Máquina para separar un número deseado de chapas metálicas de un paquete maestro,
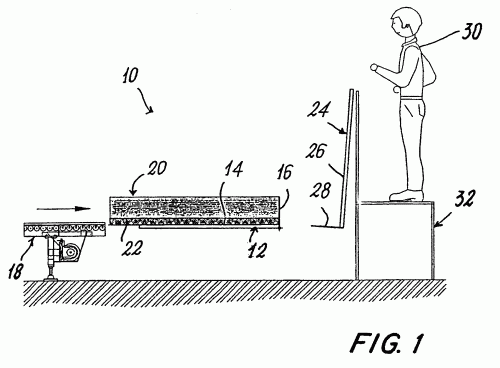
con la finalidad de conformar un paquete derivado o un conjunto de paquetes derivados, que comprende: - una primera cuna (12) movible entre una primera posición horizontal, una segunda posición casi vertical y una tercera posición vertical, estando provista la primera cuna (12) de una bancada (14) y una pared lateral perpendicular correspondiente (16), siendo capaz la bancada (14) de recibir un paquete maestro (20) junto con la paleta de carga correspondiente cuando la primera cuna (12) está en su primera posición, apoyándose las chapas metálicas del paquete maestro (20) por sus bordes, en la segunda posición de la primera cuna (12), contra la pared lateral (16) de la primera cuna (12), estando provista también la primera cuna (12) de medios (44) para mover su bancada (14) en paralelo a sí misma; - una segunda cuna (24) movible entre una primera posición vertical, en la que mira a la primera cuna (12) cuando está en su tercera posición, y una segunda posición casi vertical, estando provista la segunda cuna (24) de una bancada (26) y una pared lateral perpendicular correspondiente (28), estando provista también la segunda cuna (24) de medios (34) para mover su bancada (26) en paralelo a sí misma, coincidiendo sustancialmente el borde libre de la pared lateral (28) de la segunda cuna (24) con el borde libre de la pared lateral (16) de la primera cuna (12) tanto cuando ambas cunas (12, 24) están en su segunda posición como cuando la primera cuna (12) está en su tercera posición y la segunda cuna (24) está en su primera posición; y - un elemento separador (38) insertable entre las chapas metálicas (20) soportadas por la primera cuna (12) cuando está en su segunda posición para separar el número deseado (36) de las mismas del paquete maestro (20), actuando también el elemento separador (38) como un elemento empujador contra las chapas metálicas separadas (36) para moverlas hasta la segunda cuna (24) cuando ésta está en su segunda posición.
Tipo: Resumen de patente/invención.
Solicitante: MATTER S.R.L.
OIKI ACCIAI INOSSIDABILI S.P.A.
Nacionalidad solicitante: Italia.
Dirección: VIA DON MILANI 4/A,42020 QUATTRO CASTELLA, REGGIO.
Inventor/es: SELMI, SILVIO.
Fecha de Publicación: .
Fecha Concesión Europea: 26 de Mayo de 2004.
Clasificación Internacional de Patentes:
- B65H3/32 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65H MANIPULACION DE MATERIALES DELGADOS O FILIFORMES, p. ej. HOJAS, BANDAS, CABLES. › B65H 3/00 Sacado de artículos de las pilas (unión, colocación o agrupado de artículos B65H 39/00; máquinas para separar bandas superpuestas B65H 41/00; desapilado de material delgado combinado con el plegado B65H 45/26; combinaciones de operaciones de apilado y de sacado de artículos, presentando un interés distinto de la operación individual de apilado o de sacado B65H 83/00). › por elementos, p. ej. dedos, placas, rodillos que pasan entre los artículos a sacar y el resto de la pila (tales elementos empleados solamente como dispositivos adicionales para ayudar a retirar o evitar la alimentación doble B65H 3/50).
Patentes similares o relacionadas:
Manipulación y aireación automáticas de una pila de hojas de papel, del 8 de Julio de 2020, de GRAPHIC ROBOTICS APS: Método de manipulación y de aireación de una pila de trabajo de hojas de papel rectangulares en conexión con el uso de las hojas de papel en un centro de 5 impresión, […]
Método para el manejo de pilas de sustratos flexibles, del 7 de Agosto de 2019, de Yaskawa Nordic AB: Método para manejar pilas de sustratos flexibles por medio de una pinza , la pinza que está dispuesta en un brazo de un robot y que tiene un dedo […]
Pinzas, del 13 de Marzo de 2019, de Yaskawa Nordic AB: Unas pinzas adaptadas para usarse en un sistema automático para manipular sustratos flexibles proporcionados en una pila , pudiendo disponerse de forma rotatoria […]
Sistema de fraccionamiento para fraccionar elementos planos apilables en una pila para un procesado adicional, del 6 de Marzo de 2019, de BOBST GRENCHEN AG: Un sistema de fraccionamiento para fraccionar elementos planos apilables, en particular elementos de cartón, en una pila para un procesamiento […]
Sistema de manipulación para manipular una pila de elementos planos apilables, del 30 de Enero de 2019, de BOBST GRENCHEN AG: Sistema de manipulación para manipular una pila de elementos planos apilables, en particular elementos de cartón, en donde el sistema de manipulación […]
MÉTODO PARA ALIMENTAR ELEMENTOS LAMINARES EN UN DISPOSITIVO INTRODUCTOR Y ESTACIÓN ALIMENTADORA, del 30 de Noviembre de 2017, de COMERCIAL INDUSTRIAL MAQUINARIA CARTON ONDULADO S.L: Método para alimentar elementos laminares en un dispositivo introductor asociado con una estación de impresión gráfica prevista para imprimir al menos una […]
Dispositivo de despaletización para descargar cargas de una paleta y método para descargar cargas de una paleta, del 2 de Noviembre de 2016, de MAYR-MELNHOF KARTON AG: Dispositivo de despaletización para la descarga de cargas de una paleta , que comprende una pinza por medio de la que se puede sujetar una carga […]
Dispositivo para separar objetos planos individuales de un apilamiento y para el transporte progresivo de los objetos separados, del 20 de Julio de 2016, de FERAG AG: Dispositivo para separar objetos plegables planos individuales desde el lado inferior de un apilamiento de tales objetos y para el transporte progresivo de los objetos […]