MANDO CON MOVIMIENTOS DE TRASLACION Y ROTACION PARA DISPOSITIVO ELECTRONICO.
1. Mando con movimientos de traslación y rotación para dispositivo electrónico,
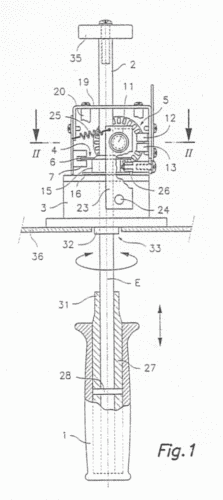
siendo dicho mando del tipo que comprende una empuñadura (1) unida al extremo de una barra cilíndrica (2) montada en un soporte (3) mediante una guía (33) que permite un movimiento de rotación de dicha barra cilíndrica (2) alrededor de su eje longitudinal (E) en ambos sentidos, un movimiento de traslación a lo largo de su eje longitudinal (E) en ambos sentidos, y combinaciones de los mismos, caracterizado porque comprende un dispositivo detector de posición angular (4) para detectar la posición angular adoptada por la barra cilíndrica (2) respecto a una posición angular de referencia y un detector de posición axial (5) para detectar la posición axial adoptada por la barra cilíndrica (2) respecto a una posición axial de referencia, donde dicho dispositivo detector de posición angular (4) incluye una primera rueda indexada (6) montada alrededor de la barra cilíndrica (2) por unos medios que permiten que la misma sea arrastrada en giro por el citado movimiento de rotación de dicha barra cilíndrica (2) y que no sea arrastrada en traslación axial por el citado movimiento de traslación de dicha barra cilíndrica (2), y un primer dispositivo lector (7, 8) capaz de detectar el paso de cada índice (9) de dicha primera rueda indexada (6) y emitir una correspondiente señal electrónica hacia unos primeros medios electrónicos de control, y donde dicho dispositivo detector de posición axial (5) incluye una segunda rueda indexada (10) fijada sobre un eje transversal (11) el cual está en contacto tangencial con la barra cilíndrica (2) por lo que es arrastrada en giro por el movimiento de traslación de la barra cilíndrica (2) sin ser afectada por el movimiento de rotación de la barra cilíndrica (2), y un segundo dispositivo lector (12, 13) capaz de detectar el paso de cada índice (14) de dicha segunda rueda indexada (10) y emitir una correspondiente señal electrónica hacia unos segundos medios electrónicos de control, estando dichos primer y segundo medios electrónicos de control adaptados para tratar dichas señales electrónicas y generar órdenes de control para dicho dispositivo electrónico.
2. Mando, de acuerdo con la reivindicación 1, caracterizado porque los citados medios para permitir que la primera rueda indexada (6) sea arrastrada en giro y no en traslación axial por la barra cilíndrica (2) comprenden un cojinete (15), de un material de bajo coeficiente de fricción, montado de manera que puede girar y deslizar sobre la barra cilíndrica (2), en un extremo de cuyo cojinete (15) está fijada la primera rueda indexada (6) y en el extremo opuesto está fijado coaxialmente un imán anular (16) de elevada intensidad provisto de una cara plana enfrentada al mencionado soporte (3), cuyo imán anular (16) es atraído axialmente hacia al menos una pieza (17) de material ferromagnético asociada al soporte (3) y radialmente hacia la barra cilíndrica (2), quedando establecida una pequeña holgura entre dicho imán anular (16) y el soporte (3) y/o pieza (17) por el contacto del cojinete (15) con un extremo interior sobresaliente (34) de la citada guía (33) de la barra cilíndrica (2).
3. Mando, de acuerdo con la reivindicación 2, caracterizado porque comprende un elemento de rodadura (26) fijado en una posición próxima a una cara plana del imán anular (16) opuesta a dicha cara plana enfrentada al mencionado soporte (3), cuyo elemento de rodadura (26) actúa como un retenedor axial de seguridad en caso de que el cojinete (15) sea arrastrado axialmente por la barra cilíndrica (2) a pesar de la atracción magnética del imán anular (16), sin impedir la rotación del cojinete (15).
4. Mando, de acuerdo con la reivindicación 1, caracterizado porque dicho eje transversal (11) presenta un cuello (18) formado por dos superficies troncocónicas opuestas enlazadas por una superficie cilíndrica de menor diámetro, efectuándose el citado contacto tangencial de la barra cilíndrica (2) con el eje transversal (11) por dichas dos superficies troncocónicas opuestas.
5. Mando, de acuerdo con la reivindicación 1, caracterizado porque dicho eje transversal (11) está montado en un brazo basculante (23) en forma de "U" invertida, unido por los extremos de sus brazos al soporte (3) mediante unas respectivas articulaciones (24) coaxiales y empujado contra la barra cilíndrica (2) por al menos un miembro elástico (25).
6. Mando, de acuerdo con la reivindicación 5, caracterizado porque comprende un armazón (19) unido al citado soporte (3) por unas columnas (20), estando dicho miembro elástico (25) dispuesto entre dicho brazo basculante (23) y dicho armazón (19).
7. Mando, de acuerdo con la reivindicación 6, caracterizado porque dicho primer dispositivo lector (7, 8) junto con sus correspondientes primeros medios electrónicos de control y dicho segundo dispositivo lector (12, 13) junto con sus correspondientes segundos medios electrónicos de control están montados en unas respectivas primera y segunda placas de circuito impreso (21, 22) fijadas a dicho armazón (19) en unas posiciones adecuadas para que los primer y segundo dispositivos lectores (7, 8; 12, 13) puedan leer sus respectivas primera y segunda ruedas indexadas (6, 10).
8. Mando, de acuerdo con la reivindicación 1, caracterizado porque dichos índices (9, 14) de dichas primera y segunda ruedas indexadas (6, 10) comprenden una serie de aberturas repartidas circunferencialmente a intervalos angulares regulares a lo largo de todo el perímetro, y cada uno de los primer y segundo dispositivos lectores (7, 8; 12, 13) comprende al menos un detector óptico (7, 12) del tipo provisto de un emisor de luz y de un receptor de luz capaz de detectar el paso de la luz emitida a través de dichas aberturas.
9. Mando, de acuerdo con la reivindicación 8, caracterizado porque cada uno de los primer y segundo dispositivos lectores (7, 8; 12, 13) comprende, además, un detector óptico adicional (8, 13) situado de manera que coopera con el detector óptico (7, 12) para efectuar una lectura de mayor precisión.
10. Mando, de acuerdo con la reivindicación 1, caracterizado porque dicha empuñadura (1) comprende un alma (27), de un material relativamente rígido, unida a la barra cilíndrica (2) mediante un pasador (28), y un recubrimiento (30) de un material elastómero, sobresaliendo un extremo interior (31) del alma (27) desde dicho recubrimiento (30) para ofrecer un primer tope de limite de carrera axial de la barra cilíndrica (2) contra un extremo exterior (32) de la guía (33).
11. Mando, de acuerdo con la reivindicación 6, caracterizado porque comprende una pieza (35), de un material de bajo coeficiente de fricción, fijada al extremo de la barra cilíndrica (2) distal de la empuñadura (1), cuya pieza (35) ofrece un segundo tope de límite de carrera axial de la barra cilíndrica (2) contra una superficie exterior del armazón (19).
Tipo: Resumen de patente/invención.
Solicitante: INDUSTRIAS LORENZO, S.A..
Nacionalidad solicitante: España.
Provincia: BARCELONA.
Inventor/es: LLOVET,ANTONI.
Fecha de Solicitud: 20 de Septiembre de 2002.
Fecha de Publicación: .
Fecha de Concesión: 8 de Mayo de 2003.
Clasificación Internacional de Patentes:
- G05D3/00 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › Control de la posición o de la dirección (G05D 1/00 tiene prioridad; control de programa numérico G05B 19/18).
Patentes similares o relacionadas:
Dispositivo de seguridad de localización de personas durante el baño, del 20 de Febrero de 2019, de DEALBA PASTOR PATENTS S.L: Incorpora emisores de ondas radioeléctricas las cuales son detectadas por unas etiquetas que realizan la detección de las ondas como receptores, que están […]
Aparato de control, cabezal de soporte que usa el mismo, y método de control de cabezal de soporte, del 16 de Enero de 2019, de SZ DJI Osmo Technology Co., Ltd: Cardán para controlar un dispositivo óptico para realizar una acción, que comprende un dispositivo de control, un conjunto de control conectado con el dispositivo […]
DISPOSITIVO PARA CONTROL DE TAREAS DE TRABAJADORES, del 19 de Septiembre de 2018, de ROLDÓS DINARES, Josep M: 1. Dispositivo para control de tareas de trabajadores, para centros de trabajo en los que están previstas una pluralidad de tareas específicas a realizar por los trabajadores, […]
DISPOSITIVO DE ILUMINACIÓN, del 24 de Enero de 2017, de IOT LUX DREAMS, S.L: 1. Dispositivo de iluminación, que partiendo de la estructuración convencional de una luminaria led, en la que se establece una carcasa , asociada a un poste o elemento […]
HELIÓSTATO, del 23 de Diciembre de 2015, de APLICACIONES RENOVABLES INTEGRADAS, SL: Helióstato que dispone de un eje de accionamiento apuntando al objetivo, sensores solares de reflexión, refracción o directos, control en lazo cerrado, con posibilidad de […]
 Sistema y método para generar un camino para una unidad de accionamiento móvil, del 7 de Diciembre de 2015, de Amazon Technologies, Inc: Un método de transporte de artículos de inventario, que comprende:
un módulo de planificación de ruta que recibe una petición de ruta a partir […]
Sistema y método para generar un camino para una unidad de accionamiento móvil, del 7 de Diciembre de 2015, de Amazon Technologies, Inc: Un método de transporte de artículos de inventario, que comprende:
un módulo de planificación de ruta que recibe una petición de ruta a partir […]
 ESTRUCTURA PARA DESPLAZAMIENTO SINCRONIZADO DE CORREAS TRANSPORTADORAS UTILIZANDO GPS, del 27 de Agosto de 2015, de SITECH SOUTHERN CONE SPA: La invención provee una estructura de sistema georreferencia adosada a un cabezal para el transporte sincronizado de una correa transportadora mediante una pluralidad de […]
ESTRUCTURA PARA DESPLAZAMIENTO SINCRONIZADO DE CORREAS TRANSPORTADORAS UTILIZANDO GPS, del 27 de Agosto de 2015, de SITECH SOUTHERN CONE SPA: La invención provee una estructura de sistema georreferencia adosada a un cabezal para el transporte sincronizado de una correa transportadora mediante una pluralidad de […]
Método y medios para controlar un robot, del 22 de Julio de 2015, de Universal Robots ApS: Un método para programar un robot incluyendo un brazo de robot, incluyendo el método colocar el robot en una posición dada P0 con relación a objetos en el entorno del robot […]