Sistema y método para generar un camino para una unidad de accionamiento móvil.
Un método de transporte de artículos de inventario, que comprende:
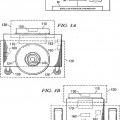
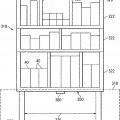
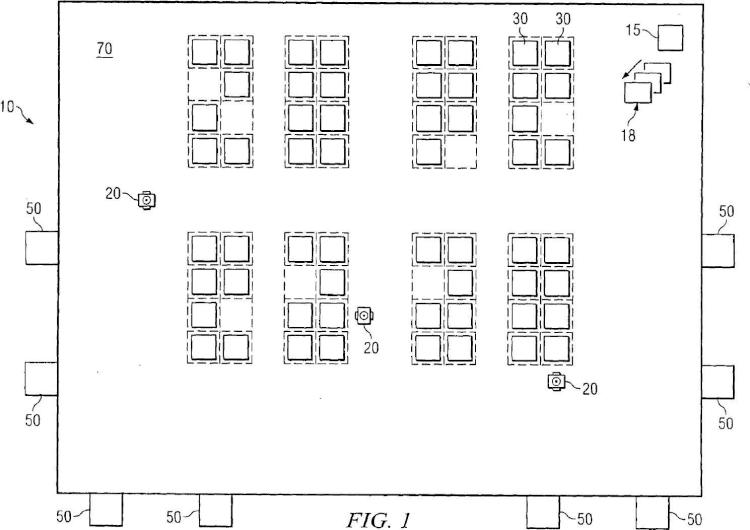
un módulo de planificación de ruta (94) que recibe una petición de ruta (22) a partir de una unidad de accionamiento móvil (20), la petición de ruta que identifica una ubicación de destino dentro de un espacio de trabajo (70), en donde el espacio de trabajo (70) comprende al menos una celda (14) asociada con un primer atributo de celda y al menos una celda (14) que no está asociada con el primer atributo de celda, el primer atributo de celda que se asocia con las celdas (14) en las que los soportes de inventario (30) se almacenan cuando no están siendo transportados, en donde la unidad de accionamiento móvil (20), cuando no está acoplada con un soporte de inventario (30), es capaz de moverse a través de espacios ocupados actualmente por soportes de inventario (30) almacenados pero no es capaz de hacerlo así cuando está acoplada con un soporte de inventario (30), la unidad de accionamiento móvil (20) que comprende un cabezal de acoplamiento (110), los soportes de inventario (30) cada uno que comprende un bastidor (310) que comprende una superficie de acoplamiento (350) y cuatro patas (328) que forman aberturas de dispositivo (326) para permitir a la unidad de accionamiento móvil (20) moverse y colocarse debajo del bastidor (310) y adyacente a la superficie de acoplamiento (350), en donde la superficie de acoplamiento (350) se acopla a una parte del cabezal de acoplamiento (110) cuando la unidad de accionamiento móvil (20) está acoplada con el soporte de inventario (30) y soporta el peso del soporte de inventario (30) mientras que el soporte de inventario (30) está acoplado con la unidad de accionamiento móvil (20);
el módulo de planificación de ruta (94) que determina un estado de la unidad de accionamiento móvil (20);
en respuesta a determinar que la unidad de accionamiento móvil (20) está asociada con un primer estado, el módulo de planificación de ruta (94) que genera un camino (16) a la ubicación de destino para la unidad de accionamiento móvil (20) que atraviesa las celdas (14) asociadas con el primer atributo de celda, el primer estado que está asociado con una unidad de accionamiento móvil (20) que no está acoplada actualmente con un soporte de inventario;
en respuesta a determinar que la unidad de accionamiento móvil (20) no está asociada con el primer estado, el módulo de planificación de ruta (94) que genera un camino (16) a la ubicación de destino para la unidad de accionamiento móvil (20) que no atraviesa las celdas (14) asociadas con el primer atributo de celda;
el módulo de planificación de ruta (94) que transmite una respuesta de ruta (24) que incluye información que define el camino (16) generado a la unidad de accionamiento móvil (20); y
después de recibir la respuesta de ruta (24), la unidad de accionamiento móvil (20) que comienza a atravesar el camino (16) generado a la ubicación de destino.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2007/070600.
Solicitante: Amazon Technologies, Inc.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: P.O. Box 8102 Reno, NV 89507 ESTADOS UNIDOS DE AMERICA.
Inventor/es: MOUNTZ,MICHAEL,C, D\'ANDREA,RAFFAELLO, WURMAN,PETER R, BARBEHENN,MICHAEL T, HOFFMAN,ANDREW E.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05D3/00 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › Control de la posición o de la dirección (G05D 1/00 tiene prioridad; control de programa numérico G05B 19/18).
- G06Q10/08 G […] › G06 CALCULO; CONTEO. › G06Q METODOS O SISTEMAS DE PROCESAMIENTO DE DATOS ESPECIALMENTE ADAPTADOS PARA FINES ADMINISTRATIVOS, COMERCIALES, FINANCIEROS, DE GESTION, DE SUPERVISION O DE PRONOSTICO; METODOS O SISTEMAS ESPECIALMENTE ADAPTADOS PARA FINES ADMINISTRATIVOS, COMERCIALES, FINANCIEROS, DE GESTION, DE SUPERVISION O DE PRONOSTICO, NO PREVISTOS EN OTRO LUGAR. › G06Q 10/00 Administración; Gestión. › Logística, p. ej. almacenamiento, carga, distribución o transporte; Inventario o gestión de existencias, p. ej. para reposición, adquisición o equilibrio ante peticiones.
- G06Q50/30 G06Q […] › G06Q 50/00 Sistemas o métodos especialmente adaptados para sectores de negocios específicos, p. ej. servicios públicos o turismo (informática para la atención sanitaria G16H). › Transporte; Comunicaciones.
PDF original: ES-2553327_T3.pdf


Patentes similares o relacionadas:
Dispositivo de seguridad de localización de personas durante el baño, del 20 de Febrero de 2019, de DEALBA PASTOR PATENTS S.L: Incorpora emisores de ondas radioeléctricas las cuales son detectadas por unas etiquetas que realizan la detección de las ondas como receptores, que están […]
Aparato de control, cabezal de soporte que usa el mismo, y método de control de cabezal de soporte, del 16 de Enero de 2019, de SZ DJI Osmo Technology Co., Ltd: Cardán para controlar un dispositivo óptico para realizar una acción, que comprende un dispositivo de control, un conjunto de control conectado con el dispositivo […]
DISPOSITIVO PARA CONTROL DE TAREAS DE TRABAJADORES, del 19 de Septiembre de 2018, de ROLDÓS DINARES, Josep M: 1. Dispositivo para control de tareas de trabajadores, para centros de trabajo en los que están previstas una pluralidad de tareas específicas a realizar por los trabajadores, […]
DISPOSITIVO DE ILUMINACIÓN, del 24 de Enero de 2017, de IOT LUX DREAMS, S.L: 1. Dispositivo de iluminación, que partiendo de la estructuración convencional de una luminaria led, en la que se establece una carcasa , asociada a un poste o elemento […]
HELIÓSTATO, del 23 de Diciembre de 2015, de APLICACIONES RENOVABLES INTEGRADAS, SL: Helióstato que dispone de un eje de accionamiento apuntando al objetivo, sensores solares de reflexión, refracción o directos, control en lazo cerrado, con posibilidad de […]
 ESTRUCTURA PARA DESPLAZAMIENTO SINCRONIZADO DE CORREAS TRANSPORTADORAS UTILIZANDO GPS, del 27 de Agosto de 2015, de SITECH SOUTHERN CONE SPA: La invención provee una estructura de sistema georreferencia adosada a un cabezal para el transporte sincronizado de una correa transportadora mediante una pluralidad de […]
ESTRUCTURA PARA DESPLAZAMIENTO SINCRONIZADO DE CORREAS TRANSPORTADORAS UTILIZANDO GPS, del 27 de Agosto de 2015, de SITECH SOUTHERN CONE SPA: La invención provee una estructura de sistema georreferencia adosada a un cabezal para el transporte sincronizado de una correa transportadora mediante una pluralidad de […]
Método y medios para controlar un robot, del 22 de Julio de 2015, de Universal Robots ApS: Un método para programar un robot incluyendo un brazo de robot, incluyendo el método colocar el robot en una posición dada P0 con relación a objetos en el entorno del robot […]
PROCEDIMIENTO DE TRATAMIENTO DE UNA SEÑAL PROCEDENTE DE UN SENSOR DE POSICIÓN DE UN ÓRGANO DE MANDO DE UN VEHÍCULO AUTOMÓVIL, del 13 de Julio de 2011, de RENAULT S.A.S.: Procedimiento de tratamiento de una señal (θclutch) procedente de un sensor de posición de un órgano de mando de un embrague de […]