Sistema de variador de velocidad y fuerza.
Sistema variador de velocidad y fuerza dispuesto entre un propulsor (1) y un receptor (2),
caracterizado porque comprende: a) un piñón cónico (6), solidario del eje del propulsor (1) o receptor (2), que tiene desarrollada un hilo dentado continuo en forma de rosca en su superficie externa; b) un piñón cilíndrico (3), solidario del eje del receptor (2) o propulsor (1), que tiene en su superficie externa un hilo dentado continuo en forma de rosca complementaria de la de dicho piñón cónico (6), y que puede desplazarse a lo largo de un eje (4) paralelo a la superficie externa de dicho piñón cónico (6) variando así la relación de transmisión entre el propulsor (1) y el receptor (2).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201300842.
Solicitante: FISCAL MARQUEZ,JOSE LUIS.
Nacionalidad solicitante: España.
Inventor/es: FISCAL MARQUEZ,JOSE LUIS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16H3/42 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 3/00 Transmisiones de engranajes para transmitir un movimiento rotativo con una relación de velocidad variable o para invertir el movimiento rotativo (mecanismos, cambio de velocidad o de insersión F16H 59/00 - F16H 63/00). › cuyos engranajes tienen dientes de forma o disposición múltiples, p. ej. variables casi hasta el infinito.
Descripción:
OBJETO DE LA INVENCIÓN
La presente invención se refiere a un sistema de variación de velocidad y fuerza intercalado entre un propulsor y un receptor para realizar un determinado trabajo.
El objeto de la invención es conseguir que las variaciones de la relación fuerza-velocidad entre un propulsor y un receptor se mantengan óptimas, eficaz, suaves, sin saltos y no escalonadas.
ANTECEDENTES DE LA INVENCIÓN
Los mecanismos o sistemas para variar la relación entre velocidad y fuerza que suministra un propulsor constituye una técnica de uso generalizado, consistente en una serie de pifiones dentados de mayor y menor diámetro engranados entre si individualmente según se elija o requiera el momento de esfuerzo o de velocidad, poniendo en contacto la velocidad de giro y fuerza del propulsor a través de dicha serie de pifiones dentados, con la entrada del mecanismo receptor para realizar el trabajo requerido.
Sin embargo y como es evidente cunado se produce un cambio de velocidad provocado por un cambio o elección de piñones engranados entre si aumentaremos la velocidad de salida con una disminución de fuerza o viceversa.
Esto supone que durante un determinado periodo de tiempo la velocidad de marcha del mecanismo se perciba un escalón o salto en el proceso de cambio de velocidad, con lo cual se pierde eficacia y se producen brusquedades.
DESCRIPCIÓN DE LA INVENCIÓN
El sistema de variación de velocidad y fuerza que la invención propone resuelve de forma plenamente satisfactoria la problemática anteriormente expuesta en los diferentes aspectos comentados permitiendo una respuesta inmediata ante una variación de fuerza-velocidad requerida por el sistema, eficiente, suave y sin saltos en el proceso de variación de velocidad y fuerza.
Para ello y de forma más concreta dicho sistema se basa en un mecanismo como medio de transmisión de velocidad y giro, que está comprendido de un piñón cónico alargado, con un diámetro mayor en un extremo y un diámetro menor en el otro extremo, el cual tiene desarrollado un hilo dentado en forma de rosca con varios hilos de entrada por vuelta, repartido en la circunferencia del eje piñón cónico para lograr un mayor ángulo de inclinación del hilo dentado roscado por vuelta realizada al eje y mayor inclinación de los hilos dentado roscado, consiguiendo con ello un contacto optimo entre los hilos dentado roscado del piñón conductor y conducido en su engrane, un piñón desplazable de menor diámetro que la parte de mayor diámetro del eje cónico, pero mayor diámetro que la parte de menor diámetro del eje cónico, desarrollado con el mismo tipo de hilos dentados roscado que el piñón cónico, que se desplazará por toda la longitud del piñón cónico según requiera el momento de esfuerzo y velocidad del mecanismo o sistema receptor.
Por ejemplo, si el piñón desplazable (siendo este el conductor) se encuentra engranado en la parte de mayor diámetro del piñón cónico (conducido), este último piñón mencionado desarrollará menor velocidad de giro aumentado la fuerza de salida (de giro o torción) con respecto al eje piñón cilindrico conductor.
Ahora bien, si emplazamos el piñón desplazable en la zona de menor diámetro del piñón cónico (conducido) siendo de menor diámetro esa zona del piñón cónico que el diámetro del piñón desplazable. Como resultado de esta variación de emplazamiento del piñón desplazable con respecto a los diámetros del piñón cónico obtendremos y desarrollaremos mayor velocidad de giro pero menor fuerza de salida (de giro o torción) con respecto a la velocidad y fuerza del piñón conductor.
Como resultados de estas variaciones del posicionamiento del piñón desplazable sobre la longitud dentada del piñón cónico y por consiguiente la variación de diámetros del piñón cónico, que se produce con respecto al piñón desplazable, obtendremos y desarrollaremos mayor velocidad de giro pero menor fuerza de salida (de giro o torción) con respecto a la velocidad y fuerza del piñón conductor o viceversa según requiera el mecanismo receptor.
Este mecanismo se puede desarrollar actuando el eje piñón cónico como conductor o conducido, en conjunción con el piñón desplazable según requiera el diseño de este sistema de variador de velocidad y el trabajo a realizar.
Con este mecanismo se consigue aumentar o disminuir la velocidad de salida de un eje conducido directamente proporcional con la fuerza que obtendremos en la salida del mismo eje según requiera el tipo de trabajo (sistema) en cada momento de forma eficiente, suave y sin saltos en el sistema de variación de velocidad y fuerza.
DESCRIPCIÓN DE LOS DIBUJOS
Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características de invento, de acuerdo con un ejemplo de realización practica del mismo, se acompaña como parte integrante de dicha descripción, una hoja única de planos en la que con carácter ilustrativos y no limitativos y en su única figura esquemáticamente, el sistema de variación de velocidad y fuerza que constituye el objeto de la presente invención.
REALIZACIÓN PREFERENTE DE LA INVENCIÓN
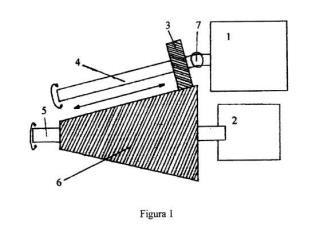
En la figura reseñada y como elementos se ha representado dos zonas cuadradas delimitadas por une línea que actuaran de propulsor (1) o receptor (2) según las figuras 1 ó 2, según interese.
Pues bien, de acuerdo con lo mencionado anteriormente se establece un eje (4) accionado por el propulsor (1) en el cual está instalado el piñón desplazable (3) que actúa sobre el piñón cónico (6) que va establecido sobre el eje (5) que entra en contacto con el mecanismo receptor (2) del trabajo a realizar, de manera que cuando 5 el piñón desplazable (3) actué engranado en la zona de mayor diámetro del piñón cónico (6) obtendremos menor revoluciones pero más fuerza de salida para el receptor (2) del trabajo a realizar, en cambio al ir posicionando el piñón desplazable (3) hacia el extremo de menor diámetro del piñón cónico (6) conseguiremos ir aumentando la velocidad de giro y disminuyendo la fuerza en proporción directa, del 10 eje (5) conectado al receptor (2) del trabajo a realizar.
Con esta invención se consigue que al actuar el piñón desplazable (3) sobre el piñón cónico (6) desde el diámetro mayor al diámetro menor de este último piñón (6), se consigue de una manera eficaz, suave y sin saltos, esto se consigue a merced 15 de que los dientes de los piñones mencionados (3) y (6) son varios hilos de entrada por vuelta roscados consiguiendo gran ángulo de inclinación para el contacto y agarre de los hilos dentados de los piñones (3) y (6).
Consiguiendo con esta invención variaciones de velocidad y fuerza sin 20 interrupciones y lo más suave posible.
El eje (4) por el que se desliza el piñón desplazable (3), está acoplado al propulsor (1) o receptor (2) según las figuras 1 ó 2, mediante acople (7).
Reivindicaciones:
1.- Sistema variador de velocidad y fuerza dispuesto entre un propulsor (1) y un receptor (2), caracterizado porque comprende: a) un piñón cónico (6), solidario del eje del
propulsor (1) o receptor (2), que tiene desarrollado un hilo dentado continuo en forma de rosca
en su superficie externa; b) un piñón cilindrico (3), solidario del eje del receptor (2) o propulsor (1), que tiene en su superficie externa un hilo dentado continuo en forma de rosca complementaria de la de dicho piñón cónico (6), y que puede desplazarse a lo largo de un eje (4) paralelo a la superficie extema de dicho piñón cónico (6) variando así la relación de 10 transmisión entre el propulsor (1) y el receptor (2).
2.- Sistema variador según la reivindicación 1, caracterizado porque los hilos dentados de ambos piñones son múltiples a fin de mejorar el contacto mutuo.
Patentes similares o relacionadas:
 Disposición introducida en un delimitador oculto de receptor-emisor para sistemas neumáticos y similares, del 23 de Diciembre de 2013, de TECHINVEST LTDA: Disposición para utilizar en el interior de los neumáticos, que comprende:
un transpondedor (T) para la emisión y recepción de señales de […]
Disposición introducida en un delimitador oculto de receptor-emisor para sistemas neumáticos y similares, del 23 de Diciembre de 2013, de TECHINVEST LTDA: Disposición para utilizar en el interior de los neumáticos, que comprende:
un transpondedor (T) para la emisión y recepción de señales de […]
 ENGRANAJE-CONO DENTADO PARA EL CAMBIO DE MARCHAS, del 10 de Agosto de 2012, de PORRAS VILA, FRANCISCO JAVIER: El Engranaje-Cono dentado para el cambio de marchas, es un mecanismo para un sistema móvil, que puede cambiar las distintas marchas del engranaje, sin necesidad de utilizar […]
ENGRANAJE-CONO DENTADO PARA EL CAMBIO DE MARCHAS, del 10 de Agosto de 2012, de PORRAS VILA, FRANCISCO JAVIER: El Engranaje-Cono dentado para el cambio de marchas, es un mecanismo para un sistema móvil, que puede cambiar las distintas marchas del engranaje, sin necesidad de utilizar […]
MECANISMO VARIADOR ESFERICO DE BOLAS., del 1 de Diciembre de 2001, de IZAGUIRRE IRURE,JOSU: La presente invención se refiere a un mecanismo variador esférico de bolas concebida para transmitir movimiento circular rotativo de forma automática entre árboles […]
ENGRANAJE DE TORNILLO SINFIN TRONCOCONICO., del 1 de Diciembre de 1999, de FORG, ALFRED: LA INVENCION SE REFIERE A UN ENGRANAJE QUE COMPRENDE UN ELEMENTO DE CONO TRUNCADO ACOPLADO A UN EJE MOTRIZ ; UN ELEMENTO REDUCTOR […]
CAJA DE CAMBIOS BICONICA CON ENGRANAJES ESFERICOS DE TRANSMISION., del 1 de Mayo de 1999, de DE HARO MILLAN, ANTONIO: CAJA DE CAMBIOS BICONICA CON ENGRANAJES ESFERICOS DE TRANSMISION DEL TIPO CONSTITUIDO POR UNA ESTRUCTURA ENTERAMENTE MECANICA PARCIALMENTE SUMERGIDA […]
 TRANSMISION DE ENGRANAJES CON CAMBIO CONTINUO DE LA RELACION DE TRANSMISION, del 25 de Enero de 2010, de PAWELEC, SLAWOMIR: Unidad de transmisión que proporciona un cambio continuo de la relación de transmisión y la transmisión continua de potencia mediante un conjunto de una o más ruedas […]
TRANSMISION DE ENGRANAJES CON CAMBIO CONTINUO DE LA RELACION DE TRANSMISION, del 25 de Enero de 2010, de PAWELEC, SLAWOMIR: Unidad de transmisión que proporciona un cambio continuo de la relación de transmisión y la transmisión continua de potencia mediante un conjunto de una o más ruedas […]