Servosistema de dirección.
Servosistema de dirección (2) para un vehículo que comprende por lo menos uno o más de entre un sensor deángulo de volante de dirección (6) adaptado para detectar el ángulo actual del volante de dirección y generar unaseñal de ángulo de volante de dirección (SWA) en respuesta al mismo,
un sensor del par del volante de dirección (8)adaptado para detectar el par actual del volante de dirección y generar una señal del par del volante de dirección(SWT) en respuesta al mismo y un sensor de la velocidad de guiñada (8) adaptado para detectar la velocidad deguiñada actual y generar una señal de la velocidad de guiñada (YR) en respuesta al mismo, estando dichas señalesadaptadas para ser transportadas a una unidad de servocontrol (4), comprendiendo además el sistema uno o mássensores del centro de gravedad (10) conectados a un conjunto de cálculo del centro de gravedad (12) que estáadaptada para calcular el centro de gravedad del vehículo sobre la base de los valores medidos recibidos desde lossensores del centro de gravedad y para transportar por lo menos una señal del centro de gravedad (COG) querepresenta el centro de gravedad del vehículo a dicha unidad de servocontrol, caracterizado porque la unidad deservocontrol está adaptada para calcular una demultiplicación del engranaje de dirección (SGR) y unaservoasistencia (SA) para el servosistema de dirección en respuesta a dicha señal del centro de gravedad y por lomenos una de entre las otras señales.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10162927.
Solicitante: SCANIA CV AB (PUBL).
Nacionalidad solicitante: Suecia.
Dirección: 151 87 Södertälje SUECIA.
Inventor/es: JUHLIN,MAGNUS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D6/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 6/00 Dispositivos para el control automático de la dirección en función de las condiciones de conducción, que son detectadas y para las cuales es aplicada una reacción (medios para producir un cambio en la dirección del vehículo B62D 1/00; válvulas de control de la dirección B62D 5/06; combinados con medios para inclinar el vehículo o las ruedas en los giros B62D 9/00). › reaccionando únicamente a las fuerzas que perturban la dirección deseada del vehículo, p. ej. fuerzas que actúan transversalmente a la dirección de desplazamiento del vehículo.
PDF original: ES-2399506_T3.pdf
Fragmento de la descripción:
Servosistema de dirección.
Campo de la invención La presente invención se refiere a un servosistema de dirección para un vehículo y un procedimiento para un servosistema de dirección, según los preámbulos de las reivindicaciones independientes. Aunque la invención es ejemplificada mediante la aplicación a un autobús, es igualmente aplicable a un camión o a un coche de pasajeros o a cualquier otro vehículo equipado con un servosistema de dirección.
Antecedentes de la invención Los autobuses y los camiones y también la mayoría de los coches de pasajeros, están equipados actualmente con un servosistema de dirección para facilitar la dirección del vehículo. En términos simples, el modo en que trabaja el servosistema es que un servomotor facilita la dirección del vehículo sobre la base de una o más señales de entrada, por ejemplo, el ángulo del volante de dirección, par del volante de dirección y velocidad de guiñada.
El servosistema de dirección ayuda entre otras cosas a corregir las desviaciones direccionales las cuales ocurren, por ejemplo, cuando el vehículo se somete a una perturbación exterior, por ejemplo un fuerte viento. Los vehículos grandes, por ejemplo autobuses y camiones, a menudo son sensibles al viento de través y existe el riesgo de que el conductor pierda el control del vehículo en un viento de través fuerte.
En los coches de pasajeros (por ejemplo VW y Audi) el sistema de la dirección puede soportar una perturbación de viento de través pero no puede acelerar la corrección por parte del conductor.
Los ejemplos de una serie de patentes que se refieren a servosistemas de dirección para vehículos se mencionan a continuación.
El documento JP 60163767 describe un servosistema de dirección para un vehículo que comprende un sensor de ángulo de volante de dirección de dirección adaptado para detectar el ángulo del volante de dirección actual y generar una señal de ángulo de volante de dirección, esta señal es transportada a una unidad de servocontrol. Un sensor del centro de gravedad está conectado a un conjunto de cálculo del centro de gravedad el cual está adaptado para calcular el centro de gravedad del vehículo sobre la base de los valores medidos recibidos desde los sensores del centro de gravedad y que transporta una señal del centro de gravedad representativa del centro de gravedad del vehículo a dicha unidad de servocontrol.
La patente US nº 4.540.059 se refiere a un sistema de la dirección concebido para compensar las desviaciones direccionales de un vehículo causadas, por ejemplo, por viento de través. Entre otras cosas, puede estar provisto un sensor de derrape de modo que una desviación no deseada del vehículo debido a un fuerte viento de través se pueda evitar sin que el conductor tenga que compensar manualmente girando el volante de dirección.
El documento GB – 1, 451, 906 también se refiere a ejemplos de un servosistema el cual compensa los efectos del viento de través sobre un vehículo.
El documento US – 6.053.270 se refiere a sistemas de corrección del desplazamiento del volante de dirección para un vehículo, sobre la base, entre otras cosas, de la posición del vehículo en la carretera.
El objetivo general de la presente invención es mejorar la maniobrabilidad de un vehículo, particularmente con relación a las perturbaciones externas, por ejemplo la acción del viento.
Sumario de la invención El objetivo mencionado anteriormente se consigue con la invención definida por las reivindicaciones independientes.
Las formas de realización preferidas se definen mediante las reivindicaciones subordinadas.
La invención se basa en la observación del inventor de que la sensibilidad al viento de través, de, por ejemplo, los autobuses es porque a menudo son pesados en la parte trasera con una consiguiente distancia larga entre el punto en el que incide la carga resultante del viento y el centro de gravedad. El resultado es un fuerte momento de derrape el cual afecta en gran medida a la estabilidad direccional del vehículo. Además, la posición del centro de gravedad en un autobús varía en gran medida dependiendo de lo pesadamente cargado que esté, por lo tanto también puede variar la sensibilidad al viento de través. La variación en la posición del centro de gravedad también afecta a la sensación de dirección cuando se conduce sin viento de través.
Al igual que dicha distribución del peso desfavorable, la dirección en los autobuses actuales tiene sólo una demultiplicación del engranaje de dirección (la cual depende del ángulo del volante de dirección) y una característica servo (la cual depende del par del volante de dirección) .
Un estudio ha mostrado que cambiando la sensación de dirección (respuesta del vehículo con una función del ángulo del volante de dirección y del par del volante de dirección) y minimizando así el esfuerzo correctivo que tiene que aplicar el conductor reduce en gran medida la desviación direccional. Esto se consigue cambiando la demultiplicación del engranaje de dirección y la servoasistencia cuando se detecta una perturbación de viento de través y la magnitud del cambio depende de la distribución actual de la carga en los ejes, esto es, la posición del centro de gravedad. La sensación de dirección por lo tanto se puede optimizar para la conducción tanto con perturbación externa como sin ella, resultando en una sensación de dirección la cual es apreciada por el conductor cuando se conduce sin perturbación, mientras al mismo tiempo se mejora la seguridad cuando ocurre la perturbación.
Una ventaja de la presente invención es que la estabilidad direccional del autobús en viento de través se mejora modificando sólo la dirección. Esto hace posible fabricar vehículos más ligeros o más grandes con una estabilidad direccional mejor los cuales son también energéticamente más eficientes.
En resumen, la invención se basa en la adaptación de la relación del servo mecanismo y la servoasistencia según el centro de gravedad del vehículo y por lo menos uno de entre los parámetros del ángulo del volante de dirección, el par del volante de dirección y la velocidad de guiñada.
Por lo tanto lo que distingue la presente invención del estado de la técnica es que también se tiene en cuenta la posición del centro de gravedad del vehículo. La idea es adaptar la sensación de dirección según la distribución de la carga en los ejes cambiando la demultiplicación del engranaje de dirección y la servoasistencia incluso cuando no exista una perturbación exterior, por ejemplo viento de través. Cuando ocurre la perturbación exterior, la sensación de dirección cambia según la distribución de la carga en los ejes con el objeto de hacer mínimo el esfuerzo máximo de dirección requerido del conductor. La presente invención preferiblemente está concebida para ayudar al conductor, en lugar de automatizar la dirección, reduciendo de ese modo el riesgo de que el sistema haga una corrección incorrecta.
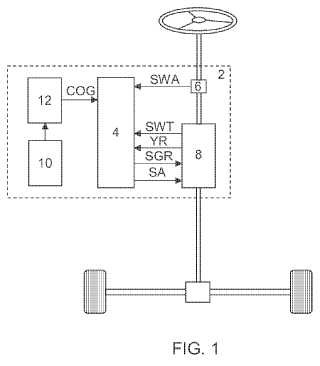
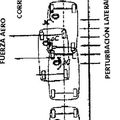
Breve descripción de los dibujos La figura 1 es un diagrama esquemático de un servosistema de dirección según la presente invención.
La figura 2 es un cuatro de flujo que ilustra el procedimiento según la presente invención.
Descripción detallada de las formas de realización preferidas de la invención La invención se describe con mayor detalle a continuación haciendo referencia a los dibujos adjuntos, utilizando los siguientes parámetros y expresiones:
Ángulo del volante de dirección - SWA, también referido como Oh.
Par del volante de dirección - SWT, también referido como Mh.
Velocidad de guiñada - YR.
Posición del centro de gravedad del vehículo - COG.
La figura 1 describe esquemáticamente cómo actúa el volante de dirección, a través del vástago del volante de dirección, en la dirección de las ruedas de un vehículo. Describe un vástago del volante de dirección físico, pero un especialista dentro de este ámbito apreciará que existen otras soluciones, por ejemplo transmisión eléctrica de las señales de control a motores auxiliares adaptados para realizar la dirección localmente.
La figura 1 describe un servosistema de dirección 2 para un vehículo que comprende por lo menos uno o más de entre un sensor del ángulo de derrape 6 para detectar el ángulo actual del volante de dirección y que genera una señal de ángulo de volante de dirección SWA en respuesta al ángulo del volante de dirección detectado, un sensor del par de la dirección 8 adaptado para detectar el par actual del volante de dirección y que genera una señal del par del volante de dirección SWT en respuesta... [Seguir leyendo]
Reivindicaciones:
1. Servosistema de dirección (2) para un vehículo que comprende por lo menos uno o más de entre un sensor de ángulo de volante de dirección (6) adaptado para detectar el ángulo actual del volante de dirección y generar una señal de ángulo de volante de dirección (SWA) en respuesta al mismo, un sensor del par del volante de dirección (8) adaptado para detectar el par actual del volante de dirección y generar una señal del par del volante de dirección (SWT) en respuesta al mismo y un sensor de la velocidad de guiñada (8) adaptado para detectar la velocidad de guiñada actual y generar una señal de la velocidad de guiñada (YR) en respuesta al mismo, estando dichas señales adaptadas para ser transportadas a una unidad de servocontrol (4) , comprendiendo además el sistema uno o más sensores del centro de gravedad (10) conectados a un conjunto de cálculo del centro de gravedad (12) que está adaptada para calcular el centro de gravedad del vehículo sobre la base de los valores medidos recibidos desde los sensores del centro de gravedad y para transportar por lo menos una señal del centro de gravedad (COG) que representa el centro de gravedad del vehículo a dicha unidad de servocontrol, caracterizado porque la unidad de servocontrol está adaptada para calcular una demultiplicación del engranaje de dirección (SGR) y una servoasistencia (SA) para el servosistema de dirección en respuesta a dicha señal del centro de gravedad y por lo menos una de entre las otras señales.
2. Servosistema de dirección según la reivindicación 1, en el que el sensor del centro de gravedad (10) adopta la forma de uno o más sensores de carga de ejes.
3. Servosistema de dirección según la reivindicación 1, en el que la señal del centro de gravedad (COG) contiene información sobre los cambios en la posición del centro de gravedad en el vehículo.
4. Servosistema de dirección según la reivindicación 3, en el que la señal del centro de gravedad (COG) contiene información sobre los cambios en la posición del centro de gravedad en el vehículo en la dirección longitudinal con relación a una línea de simetría longitudinal del vehículo.
5. Servosistema de dirección según cualquiera de las reivindicaciones anteriores, en el que la señal del centro de gravedad (COG) contiene información sobre los cambios en la posición del centro de gravedad en el vehículo lateralmente con relación a la línea de simetría longitudinal del vehículo.
6. Servosistema de dirección según la reivindicación 1, en el que dichos sensores del centro de gravedad están situados próximos a la suspensión del vehículo.
7. Servosistema de dirección según la reivindicación 1, en la que dicha unidad de servocontrol calcula dichos uno o más parámetros de control mediante la aplicación de un conjunto de reglas de servocontrol.
8. Procedimiento para un servosistema de dirección (2) en un vehículo, comprendiendo dicho procedimiento por lo menos una de las etapas siguientes:
-detectar el ángulo actual del volante de dirección y generar una señal de ángulo de volante de dirección (SWA) en respuesta a la misma y transportar la señal a una unidad de servocontrol (4) ;
-detectar el par actual del volante de dirección y generar una señal del par del volante de dirección (SWT) en respuesta al mismo y transportar la señal a dicha unidad de servocontrol (4) , y
-detectar la velocidad actual de guiñada y generar una señal de velocidad de guiñada (YR) en respuesta a la misma mismo y transportar la señal a dicha unidad de servocontrol (4) ,
comprendiendo además el procedimiento:
-calcular el centro de gravedad del vehículo y transportar por lo menos una señal del centro de gravedad (COG) que representa el centro de gravedad del vehículo a dicha unidad de servocontrol (4) , caracterizado porque la unidad de servocontrol está adaptada para calcular una demultiplicación del engranaje de dirección (SGR) y una servoasistencia (SA) para el servosistema de dirección en respuesta a dicha señal del centro de gravedad y por lo menos una de entre las otras señales.
9. Procedimiento según la reivindicación 8, en el que señal del centro de gravedad contiene información sobre los cambios en la posición del centro de gravedad en el vehículo.
10. Procedimiento según la reivindicación 9, en el que la señal del centro de gravedad contiene información sobre los cambios en la posición del centro de gravedad en el vehículo en la dirección longitudinal con relación a una línea de simetría longitudinal del vehículo.
11. Procedimiento según cualquiera de las reivindicaciones 9 y 10, en el que la señal del centro de gravedad contiene información sobre cambios en la posición del centro de gravedad en el vehículo lateralmente con relación a una línea de simetría longitudinal del vehículo.
12. Procedimiento según la reivindicación 8, en el que dicha unidad de servocontrol calcula dichos uno o más parámetros de control mediante la aplicación de un conjunto de reglas de servocontrol.
13. Programa de ordenador adaptado para la realización de las etapas del procedimiento según cualquiera de las reivindicaciones 8 a 12.
Patentes similares o relacionadas:
 Ballesta delantera, del 20 de Febrero de 2019, de VOLVO LASTVAGNAR AB: Una suspensión de vehículo que comprende un par de ballestas delanteras dispuestas para que se extiendan longitudinalmente en los lados […]
Ballesta delantera, del 20 de Febrero de 2019, de VOLVO LASTVAGNAR AB: Una suspensión de vehículo que comprende un par de ballestas delanteras dispuestas para que se extiendan longitudinalmente en los lados […]
Procedimiento para la operación de un sistema de asistencia al conductor para el guiado transversal de un vehículo motorizado y vehículo motorizado, del 20 de Febrero de 2015, de AUDI AG: Procedimiento para la operación de un sistema de asistencia al conductor para el guiado transversal de un vehículo motorizado con el cual […]
 Método de control para un sistema de dirección, del 28 de Mayo de 2013, de THYSSENKRUPP PRESTA AG: Método para controlar un dispositivo de dirección con medios de dirección asistida para un vehículo automóvil con al menos una rueda […]
Método de control para un sistema de dirección, del 28 de Mayo de 2013, de THYSSENKRUPP PRESTA AG: Método para controlar un dispositivo de dirección con medios de dirección asistida para un vehículo automóvil con al menos una rueda […]
 PROCEDIMIENTO Y DISPOSITIVO PARA ESTABILIZAR UN VEHICULO, del 2 de Junio de 2010, de ROBERT BOSCH GMBH: Procedimiento para la estabilización de un vehículo de carretera , en particular de un vehículo de pasajeros, con un remolque , el cual es arrastrado […]
PROCEDIMIENTO Y DISPOSITIVO PARA ESTABILIZAR UN VEHICULO, del 2 de Junio de 2010, de ROBERT BOSCH GMBH: Procedimiento para la estabilización de un vehículo de carretera , en particular de un vehículo de pasajeros, con un remolque , el cual es arrastrado […]
 SISTEMA DE AYUDA PARA LA CONDUCCION DE UN VEHICULO AUTOMOVIL, ESPECIALMENTE EN CASO DE DESVIO PROVOCADO POR UN VIENTO LATERAL, del 27 de Enero de 2010, de PEUGEOT CITROEN AUTOMOBILES SA: Sistema de ayuda a la conducción de un vehículo automóvil, especialmente en caso de desvío provocado por un viento lateral, equipado con una dirección asistida eléctrica […]
SISTEMA DE AYUDA PARA LA CONDUCCION DE UN VEHICULO AUTOMOVIL, ESPECIALMENTE EN CASO DE DESVIO PROVOCADO POR UN VIENTO LATERAL, del 27 de Enero de 2010, de PEUGEOT CITROEN AUTOMOBILES SA: Sistema de ayuda a la conducción de un vehículo automóvil, especialmente en caso de desvío provocado por un viento lateral, equipado con una dirección asistida eléctrica […]
PROCEDIMIENTO PARA LA REGULACION DE LA DINAMICA TRANSVERSAL DE UN VEHICULO CON LA DIRECCION EN EL EJE DELANTERO., del 1 de Noviembre de 2005, de DAIMLERCHRYSLER AG: La regulación de las dinámicas transversales de un vehículo de motor con dirección en las ruedas delanteras implica el uso de un modelo de vehículo lineal […]
SISTEMA DE FRENADO Y DE DIRECCION PARA UN VEHICULO., del 1 de Septiembre de 2001, de DAIMLERCHRYSLER AG: LA INVENCION SE REFIERE A UN SISTEMA DE FRENADO Y DIRECCION PARA UN VEHICULO. EL OBJETIVO DE LA INVENCION ES CONSEGUIR UN SISTEMA DE FRENADO Y DIRECCION AL […]
 SISTEMA Y PROCEDIMIENTO DE CONTROL DE GIRO DE LAS RUEDAS TRASERAS DE UN VEHICULO AUTOMOVIL CON CUATRO RUEDAS DIRECTRICES, del 16 de Abril de 2009, de RENAULT S.A.S.: Sistema de control de giro de ruedas traseras directrices situado a bordo de un vehículo automóvil con cuatro ruedas directrices , caracterizado porque incluye […]
SISTEMA Y PROCEDIMIENTO DE CONTROL DE GIRO DE LAS RUEDAS TRASERAS DE UN VEHICULO AUTOMOVIL CON CUATRO RUEDAS DIRECTRICES, del 16 de Abril de 2009, de RENAULT S.A.S.: Sistema de control de giro de ruedas traseras directrices situado a bordo de un vehículo automóvil con cuatro ruedas directrices , caracterizado porque incluye […]