Sistema de robot suspendido y método de funcionamiento del mismo.
Sistema de robot suspendido para desplazar objetos (7), que pueden estar apilados,
ubicados en una zona de almacén (1), comprendiendo dicho sistema una unidad de pórtico (3) dispuesta para desplazarse por encima de objetos ubicados en la zona de almacén (1),
un dispositivo de agarre (5) fijado a la unidad de pórtico (3) y dispuesto para desplazarse a lo largo de la unidad de pórtico, comprendiendo dicho dispositivo de agarre medios para llegar a la zona de almacén para recoger y liberar un objeto/pila de objetos y levantar el objeto/pila de objetos para su desplazamiento a otra ubicación, y
un sistema de control de robot (4) para controlar los desplazamientos de la unidad de pórtico (3) y del dispositivo de agarre (5), caracterizado por que el sistema también comprende una plataforma (15, 74) que puede situarse en el dispositivo de agarre (5), en las proximidades y por debajo de un objeto/pila de objetos (7) sujeto/sujeta en el dispositivo de agarre, para liberar un objeto individual del dispositivo de agarre (5) sobre la plataforma (15, 74), y medios portadores (9, 71, 73) para desplazar el objeto desde la plataforma hasta el borde de la 15 zona de almacén (1),
comprendiendo dicho sistema de control de robot (4) medios de control (22) para controlar los desplazamientos de la plataforma (15) y de los medios portadores (9, 71, 73), comprendiendo los medios portadores (9, 71, 73) un elemento portador (14, 73) para desplazar el objeto alejándolo de la plataforma (15, 74), y un carro (23) fijado a la unidad de pórtico (3) y dispuesto para desplazarse a lo largo de la unidad de pórtico, pudiendo desplazarse a lo largo de la unidad de pórtico hasta la posición del dispositivo de agarre (5) y más allá del mismo, estando dicha plataforma (15) y dicho elemento portador (14, 73) en conexión con el carro (23).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FI2012/050235.
Solicitante: CIMCORP OY.
Nacionalidad solicitante: Finlandia.
Dirección: Satakunnantie 5 28400 Ulvila FINLANDIA.
Inventor/es: MIIKKULAINEN,KARI, HONKANEN,JARNO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G1/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 1/00 Almacenamiento de objetos, individualmente o con un cierto orden, en almacenes o depósitos (combinaciones de transportadores en almacenes, tiendas o talleres, B65G 37/00; apilado de objetos B65G 57/00; sacado de objetos de pilas B65G 59/00; máquinas de carga B65G 65/02). › mecánicos.
- B65G63/00 B65G […] › Transferencia o transbordo a zonas de almacenaje, a estaciones de mercancías o a puertos; Instalaciones de estaciones de clasificación.
PDF original: ES-2538019_T3.pdf
Fragmento de la descripción:
Sistema de robot suspendido y método de funcionamiento del mismo.
Campo técnico 5
Esta invención se refiere a un sistema de robot suspendido utilizado para recoger, desplazar y entregar objetos en una zona de almacén. Los objetos pueden estar colocados en la zona de almacén en pilas, dicho de otro modo, los objetos son apilables.
Técnica anterior
Los sistemas de robot suspendidos de la técnica anterior recogen, desplazan y entregan objetos en una zona de almacén, tal como cajas, neumáticos de vehículo y otros objetos apilables. El presente texto describirá principalmente, a modo de ejemplo, cajas apilables en una zona de almacén. Las cajas pueden estar en la zona de 15 almacén o bien individualmente o bien apiladas. Las cajas contienen productos tales como productos alimenticios, bebidas y cartas, es decir todo de tipo de artículos que deban almacenarse y que sean aptos para su manipulación por cajas. Las cajas pueden haberse dispuesto en la zona de almacén por producto. Por ejemplo, bebidas de zumo de naranja están en una zona separada (y en pilas separadas) de bebidas de zumo de manzana.
La unidad de robot suspendido comprende una unidad de pórtico dispuesta para desplazarse sobre la zona de almacén. Una disposición común es que la unidad de pórtico se desplace sobre vigas ubicadas en los bordes de la zona de almacén. Las vigas, a su vez, están soportadas por columnas. Un dispositivo de agarre está fijado a la unidad de pórtico y dispuesto para desplazarse a lo largo de la unidad de pórtico. El sistema también comprende un sistema de control de robot para controlar el desplazamiento de la unidad de pórtico y el dispositivo de agarre. La 25 unidad de pórtico y el dispositivo de agarre pueden desplazarse de modo que el dispositivo de agarre se sitúa por encima de la caja o pila de cajas que va a recogerse. El dispositivo de agarre tiene elementos de agarre que pueden hacerse descender hasta la posición de la caja o de una caja en una pila de cajas que va a agarrarse.
Cuando los elementos de agarre están sujetando la caja, la caja/pila de cajas puede levantarse y desplazarse a otra 30 ubicación, tal como a un transportador para desplazar la caja/pila fuera del almacén o a otra posición en la zona de almacén. Cuando el dispositivo de agarre se sitúa por encima de la nueva ubicación deseada, hace descender la caja/pila y la libera. Por tanto, el sistema de robot suspendido se mueve por encima de la zona de almacén y puede levantar cajas desde la zona de almacén y hacerlas descender a la zona de almacén.
El almacén también puede comprender al menos un transportador para desplazar cajas (de manera individual o apiladas) a la zona de almacén y al menos un transportador para desplazar cajas fuera de la zona de almacén. El robot suspendido mueve las cajas que llegan a las ubicaciones deseadas en la zona de almacén y las cajas que salen al transportador. Para el mantenimiento de las mercancías almacenadas, las cajas pueden desplazarse a nuevas ubicaciones dentro de la zona de almacén. 40
La publicación de patente FI 105668 (véase también el documento EP 0 767 113 A2) describe un sistema de robot suspendido similar a la descripción anterior. El sistema puede recoger y desplazar rápidamente una pila de cajas a la ubicación deseada. También se mueve una caja individual de manera similar si la caja es la que está situada en la parte superior de una pila o si se ha colocado de manera individual en una posición de almacenamiento dentro de la 45 zona de almacén. Sin embargo, si se desea recoger una caja individual del medio de una pila, el proceso para recogerla y desplazarla es un proceso relativamente lento y tedioso. El dispositivo de agarre se mueve hasta situarse por encima de la pila de cajas que contiene la caja que va a recogerse. Se hace descender el dispositivo de agarre y éste recoge una pila de encima de la caja deseada. Esta pila se levanta, se desplaza, se hace descender y se libera en otra ubicación (encima de otra pila, encima de una caja individual o en una posición de almacenamiento 50 vacía) . El dispositivo de agarre se desplaza de nuevo hasta situarse por encima de la caja que va a recogerse, y se hace descender para recoger y levantar la caja. Tras ello, el dispositivo de agarre se desplaza hasta una nueva ubicación a la que va a desplazarse la caja recogida (tal como por encima de un transportador) y se hace descender para liberar la caja. Con el fin de no desorganizar el mantenimiento de la zona de almacén, es posible que la pila superior que se había desplazado previamente tenga que desplazarse de nuevo a la parte superior de la pila 55 original. Por tanto, el dispositivo de agarre tiene que desplazarse relativamente muchas veces hasta diferentes ubicaciones en la zona de almacén, y hacer descender y ascender sus elementos de agarre para recoger/liberar la caja/pila. Otra alternativa es que el dispositivo de agarre recoja una pila de modo que la caja deseada se sitúe en la parte inferior. La pila se libera para su transporte fuera de la zona de almacén. Fuera de la zona de almacén, la caja deseada se retira de la parte inferior de la pila manualmente, por ejemplo. La pila restante se devuelve a la zona de 60 almacén donde se recoloca o bien en la posición de almacenamiento original o bien en una nueva posición de almacenamiento. Este método alternativo también resulta tedioso.
Breve descripción de la invención 65
El objetivo de la invención es eliminar/reducir los problemas descritos anteriormente. El objetivo se conseguirá tal como se presenta en las reivindicaciones independientes. Las reivindicaciones dependientes describen diversas realizaciones de la invención.
La idea de la invención es crear un sistema que reduzca los desplazamientos del dispositivo de agarre cuando se desea recoger un objeto individual del medio de una pila de objetos (tal como cajas o neumáticos) . El número de 5 desplazamientos se reduce ya que el dispositivo de agarre puede conducirse hasta por encima de la pila de objetos deseada y no tiene que desplazarse a continuación a otra ubicación en la zona de almacén con el fin de recoger y desplazar un objeto individual. La invención comprende una disposición independiente para desplazar un objeto recogido individual al borde de la zona de almacén. El dispositivo de agarre puede desplazarse más rápidamente hasta el siguiente objeto que va a recogerse. 10
Un sistema de robot suspendido según la invención comprende una unidad de pórtico para desplazar objetos 7 ubicados en una zona de almacén 1. La unidad de pórtico está dispuesta para desplazarse por encima de objetos ubicados en la zona de almacén. El sistema también comprende un dispositivo de agarre 5 que está fijado a la unidad de pórtico y dispuesto para desplazarse a lo largo de la unidad de pórtico. El dispositivo de agarre también 15 está dispuesto para recoger y liberar objetos apilados. El sistema de robot suspendido también comprende un sistema de control de robot 4 para controlar los desplazamientos de la unidad de pórtico y del dispositivo de agarre, así como una plataforma que puede situarse por debajo del dispositivo de agarre con el fin de liberar un objeto individual del dispositivo de agarre sobre la plataforma cuando el objeto está suspendido en el dispositivo de agarre. Además, el sistema comprende medios portadores 9 para desplazar un objeto desde la plataforma hasta el borde de 20 la zona de almacén. El sistema de control de robot 4 también comprende medios de control 22 para controlar los desplazamientos de la plataforma y de los medios portadores.
Lista de figuras 25
A continuación, la invención se describirá en más detalle en referencia a los dibujos adjuntos, en los que
la figura 1 ilustra un ejemplo de un sistema de robot suspendido según la invención,
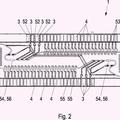
la figura 2 ilustra otro ejemplo de un sistema según la invención,
la figura 3 ilustra un ejemplo de una disposición de control de robot según la invención, 30
la figura 4 ilustra las características del sistema según la invención en más detalle,
la figura 5 también ilustra las características del sistema según la invención,
la figura 6 ilustra los medios portadores del ejemplo en la figura 1,
la figura 7 ilustra otro ejemplo de un sistema según la invención, y
la figura 8 ilustra un ejemplo de diagrama de flujo del método según la invención. 35
Descripción de la invención
La figura 1 ilustra un sistema de robot suspendido según la invención. Tal como se conoce por la técnica anterior, el sistema comprende vigas 2 en los bordes de la zona de almacén 1, sobre las que la unidad de pórtico 3 del sistema 40 está dispuesta... [Seguir leyendo]
Reivindicaciones:
1. Sistema de robot suspendido para desplazar objetos (7) , que pueden estar apilados, ubicados en una zona de almacén (1) , comprendiendo dicho sistema una unidad de pórtico (3) dispuesta para desplazarse por encima de objetos ubicados en la zona de almacén (1) , 5
un dispositivo de agarre (5) fijado a la unidad de pórtico (3) y dispuesto para desplazarse a lo largo de la unidad de pórtico, comprendiendo dicho dispositivo de agarre medios para llegar a la zona de almacén para recoger y liberar un objeto/pila de objetos y levantar el objeto/pila de objetos para su desplazamiento a otra ubicación, y un sistema de control de robot (4) para controlar los desplazamientos de la unidad de pórtico (3) y del 10 dispositivo de agarre (5) , caracterizado por que el sistema también comprende una plataforma (15, 74) que puede situarse en el dispositivo de agarre (5) , en las proximidades y por debajo de un objeto/pila de objetos (7) sujeto/sujeta en el dispositivo de agarre, para liberar un objeto individual del dispositivo de agarre (5) sobre la plataforma (15, 74) , y medios portadores (9, 71, 73) para desplazar el objeto desde la plataforma hasta el borde de la 15 zona de almacén (1) , comprendiendo dicho sistema de control de robot (4) medios de control (22) para controlar los desplazamientos de la plataforma (15) y de los medios portadores (9, 71, 73) , comprendiendo los medios portadores (9, 71, 73) un elemento portador (14, 73) para desplazar el objeto alejándolo de la plataforma (15, 74) , y un carro (23) fijado a la unidad de pórtico (3) y dispuesto para desplazarse a lo largo de la unidad 20 de pórtico, pudiendo desplazarse a lo largo de la unidad de pórtico hasta la posición del dispositivo de agarre (5) y más allá del mismo, estando dicha plataforma (15) y dicho elemento portador (14, 73) en conexión con el carro (23) .
2. Sistema según la reivindicación 1, caracterizado por que los medios portadores (9) comprenden un 25 armazón (13) que comprende dos partes de ala transversales entre sí (13A, 13B) , estando la primera parte de ala conectada al carro (23) y estando la segunda parte de ala (13B) conectada a la plataforma (15) y al elemento portador (14) , y la segunda parte de ala se extiende hasta situarse por debajo del dispositivo de agarre (5) cuando los elementos portadores (9) se encuentran en la posición del dispositivo de agarre.
3. Sistema según la reivindicación 2, caracterizado por que el armazón (13) comprende una parte de soporte (20) que está fijada a las partes de ala primera (13A) y segunda (13B) .
4. Sistema según una cualquiera de las reivindicaciones 1 a 3, caracterizado por que el carro (23) comprende un motor (24) y un tren de ruedas (17) para el desplazamiento del carro. 35
5. Sistema según una cualquiera de las reivindicaciones 1 a 4, caracterizado por que comprende un cableado (18) entre el sistema de control de robot (4) y los medios portadores (9) .
6. Sistema según la reivindicación 1, caracterizado por que los medios portadores (71, 73) comprenden un 40 transportador longitudinal (71) que está fijado a la unidad de pórtico (3) por debajo de la misma para desplazar el objeto portado por el elemento portador (73) hasta el borde de la zona de almacén.
7. Sistema según la reivindicación 6, caracterizado por que el transportador longitudinal (71) es una cinta transportadora. 45
8. Sistema según una cualquiera de las reivindicaciones 1 a 7, caracterizado por que comprende un aparato transportador longitudinal (10) ubicado en el borde de la zona de almacén (1) , estando dicho aparato dispuesto para interfuncionar con el sistema de control de robot (4) y recibir el objeto (7) desde los medios portadores (9, 71, 73) . 50
9. Método de funcionamiento de un sistema de robot suspendido según una cualquiera de las reivindicaciones 1 a 8, que comprende las siguientes etapas:
dirigir (81) el dispositivo de agarre (5) del sistema hasta situarlo por encima de un objeto (7) que va a 55 recogerse, y
recoger (82) el objeto deseado con el dispositivo de agarre de modo que se sitúe en la parte inferior de la pila de objetos que puede recogerse;
colocar (83) la plataforma (15, 74) del sistema por debajo del objeto inferior que se encuentra en el dispositivo de agarre (5) situado por encima de la zona de almacén, estando dicho objeto suspendido en el 60 dispositivo de agarre,
liberar (84) el objeto inferior del dispositivo de agarre (5) sobre la plataforma (15, 74) , y
desplazar (85) el objeto desde la plataforma hasta el borde de la zona de almacén, comprendiendo la etapa de colocación (83) desplazar los medios portadores (9) fijados a la unidad de pórtico (3) del sistema de robot suspendido hasta la posición del dispositivo de agarre (5) , comprendiendo los medios portadores 65 dicha plataforma (15) .
10. Método según la reivindicación 9, caracterizado por que la etapa de desplazamiento (85) comprende desplazar el objeto con los medios portadores (9) hasta el borde de la zona de almacén y desplazar el objeto (7) desde la plataforma (15) hasta el aparato transportador longitudinal (10) .
11. Método según las reivindicaciones 9 a 10, caracterizado por que la etapa de desplazamiento hasta el 5 aparato transportador longitudinal (10) comprende una subetapa de mantener el aparato transportador longitudinal (10) estacionario durante el desplazamiento del objeto.
12. Método según la reivindicación 9, caracterizado por que la etapa de colocación (83) comprende las subetapas de hacer descender el elemento de brazo (72) fijado al dispositivo de agarre (5) y de desplazar la 10 plataforma fijada al elemento de brazo (74) hasta situarla por debajo del objeto (7) que está suspendido en el dispositivo de agarre.
13. Método según la reivindicación 12, caracterizado por que la etapa de desplazamiento (85) comprende desplazar el objeto desde la plataforma (74) hasta el transportador longitudinal (71) fijado por debajo de la 15 unidad de pórtico (3) , y desplazar el objeto con el transportador longitudinal hasta el borde de la zona de almacén.
14. Método según la reivindicación 13, caracterizado por que comprende una subetapa de mantener el aparato transportador longitudinal (10) ubicado en el borde de la zona de almacén estacionario al menos 20 durante el tiempo que tarda el objeto en desplazarse desde el transportador longitudinal (71) hasta el aparato transportador longitudinal (10) .
Patentes similares o relacionadas:
Procedimiento y dispositivo para el almacenamiento y recuperación o reubicación de contenedores en almacenes de gran altura, del 4 de Marzo de 2020, de AMOVA GmbH: Procedimiento para almacenar y recuperar o reubicar contenedores en almacenes de gran altura de una instalación de transbordo, […]
Grúa "Backpack transtainer", del 13 de Febrero de 2020, de BARBERÁ MAYOR, Juan Carlos: El propósito de la invención de este proceso es aumentar el rendimiento de las terminales portuarias en la transferencia de contenedores […]
Control de grúa automatizado teniendo en cuenta errores de medición que dependen del objeto de carga y de la posición, del 5 de Noviembre de 2019, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento de control para un sistema de transbordo que comprende una grúa pórtico para contenedores dispuesta sobre un suelo con un carro […]
Dispositivo de aparcamiento robotizado y método para manejarlo, del 23 de Octubre de 2019, de Ocado Innovation Limited: Un sistema de aparcamiento robotizado que comprende al menos un dispositivo 50 de manipulación de carga y una pluralidad de contenedores 10 que alojan […]
"BufferCrane" proceso de alto rendimiento para grúas de carga y descarga masiva, del 14 de Octubre de 2019, de BARBERÁ MAYOR, Juan Carlos: "BufferCrane" proceso de alto rendimiento para grúas de carga y descarga masiva. Tras la suficiente elevación de la carga, dicha carga es transferida a […]
 Dispositivo para la manipulación de bultos, del 31 de Julio de 2019, de Lippert GmbH & Co. KG: Un aparato de comunicación de radio, que comprende:
un circuito , el cual, en funcionamiento
calcula un número de secuencia usando un patrón […]
Dispositivo para la manipulación de bultos, del 31 de Julio de 2019, de Lippert GmbH & Co. KG: Un aparato de comunicación de radio, que comprende:
un circuito , el cual, en funcionamiento
calcula un número de secuencia usando un patrón […]
Procedimiento e instalación de transbordo de contenedores para almacenar y desalmacenar contenedores en un almacén de contenedores, del 19 de Junio de 2019, de AMOVA GmbH: Procedimiento para colocar, extraer o reposicionar contenedores en almacenes con estererías de gran altura o almacenes en bloques de un puerto marítimo […]
PROCEDIMIENTO PARA EL TRASLADO DE CONTENEDORES ESTANDARIZADOS ENTRE UN BUQUE PORTACONTENEDORES Y UN MUELLE, del 13 de Julio de 2017, de RUIZ VEGA, Antonio Marcos: Procedimiento para el traslado de contenedores estandarizados entre un buque portacontenedores y un muelle, medíante utilización de grúas portuarias tipo pórtico, caracterizado […]