PROCEDIMIENTO DE TRATAMIENTO PROBABILISTA DE PUNTOS DETECTADOS POR UN SISTEMA DE SUPERVISION DEL ENTORNO CIRCUNDANTE.
Un procedimiento de supervisión del entorno circundante de un vehículo (2),
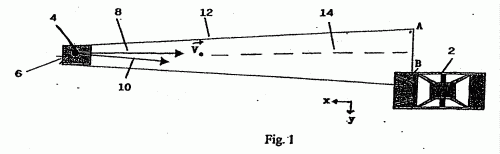
que comprende: - la medición por medio de un sistema de supervisión del entorno circundante, de la posición de al menos un punto, y - el cálculo, para un punto cuya posición (4) ha sido medida por el sistema de supervisión del entorno circundante, de un conjunto (6) de posiciones posibles del punto, teniendo en cuenta este cálculo la incertidumbre de la medición de la posición del punto por parte del sistema de supervisión, que se caracteriza porque: - el cálculo de un conjunto de posiciones posibles del punto se realiza en un instante futuro, y porque, - el procedimiento comprende para un objeto del que han sido detectados dos puntos por el sistema de supervisión del entorno circundante: - la división del conjunto (58, 60) de posiciones posibles de cada punto, en al menos dos sub-conjuntos; - el trazado de segmentos de rectas que unen los sub-conjuntos correspondientes de los conjuntos de los dos puntos; - el cálculo de una probabilidad de colisión del objeto y del vehículo (2) sumando, para uno de los dos puntos, las probabilidades de presencia del punto en los diferentes sub- conjuntos unidos por los segmentos de rectas que intersectan con el vehículo.
Tipo: Resumen de patente/invención.
Solicitante: PEUGEOT CITROEN AUTOMOBILES SA.
Nacionalidad solicitante: Francia.
Dirección: 65-71, BOULEVARD DU CH TEAU,92200 NEUILLY SUR SEINE.
Inventor/es: BARAUD, PIERRE.
Fecha de Publicación: .
Fecha Concesión Europea: 15 de Febrero de 2006.
Clasificación Internacional de Patentes:
- G01S13/93 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › para anticolisión.
- G08G1/16 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › Sistemas anticolisión.
Patentes similares o relacionadas:
DISPOSITIVO LUMÍNICO ACÚSTICO DE EMERGENCIA Y ALERTA TEMPRANA, del 30 de Julio de 2020, de CALOMARDE LORENTE, Daniel: Dispositivo lumínico acústico de emergencia y alerta temprana consistente en un conjunto de elementos destinados a informar en alerta temprana […]
Sistema anti acoso y anti colisión trasero para vehículos motorizados, del 20 de Julio de 2020, de ARBEX CALLES, Juan Ignacio: El sistema anti acoso y anti colisión trasero para vehículos motorizados, pretende disuadir, educar y si fuera necesario facilitar la identificación del infractor, […]
Procedimiento y sistema de aviso de colisión para la detección de vehículos en dirección contraria, del 24 de Junio de 2020, de Siemens Mobility GmbH: Procedimiento para la detección de vehículos de transporte en dirección contraria en un sistema de transporte con rutas fijas, que presenta las […]
Sistema de visualización de un vehículo, del 24 de Junio de 2020, de LEIA INC: Un sistema de vigilancia de vehículos que comprende: un escáner tridimensional 3D, configurado para escanear una región adyacente […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]
MÉTODO Y SISTEMA PARA CONTROLAR UNA PLURALIDAD DE VEHÍCULOS AUTÓNOMOS, del 11 de Junio de 2020, de SEAT, S.A.: La presente invención se refiere a un método para controlar una pluralidad de vehículos autónomos, donde el método comprende las etapas de determinar una situación […]
DISPOSITIVO ELECTRÓNICO DE SEGURIDAD, del 20 de Marzo de 2020, de PETRONICS TECNOLOGIA S.L: Dispositivo electrónico de seguridad independiente del vehículo apto para ser fijado al vehículo que comprende una cámara de video que grava en continuo […]
Caracterización de una colisión de vehículo, del 8 de Enero de 2020, de GEOTAB Inc: En el presente documento se describen ejemplos de un sistema que procesa información que describe el movimiento de un vehículo en un momento relacionado con una posible […]