PLATAFORMA ROBÓTICA PARA EL ASCENSO A POSTES.
Plataforma robótica para el ascenso a postes, que comprende un bastidor (1) formado por cuatro sectores semicirculares articulados dos a dos en planos paralelos.
También comprende dos uniones (6), una desmontable y otra articulada, que unen el bastidor (1), y permiten cerrar la plataforma y que ésta abrace al poste. Además comprende una cubierta (7) que aloja accesorios, y al menos tres ruedas (2), dispuestas radialmente que están en contacto con la superficie del poste. También comprende un mecanismo de presión (3) que presiona las ruedas contra el poste, unos medios motores, unos medios de transmisión (8), y unos medios de control (12) remoto del robot. De aplicación en aquellos sectores en los que se diseñen, fabriquen, produzcan o utilicen plataformas robóticas elevadoras, como por ejemplo el de maquinaria y equipo mecánico, el de material y equipo eléctrico, electrónico y óptico, o material para el transporte
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201001521.
Solicitante: UNIVERSIDAD DE OVIEDO.
Nacionalidad solicitante: España.
Provincia: ASTURIAS.
Inventor/es: SIERRA VELASCO,JOSE MANUEL, DIAZ GONZALEZ,JUAN, ALVAREZ GONZALEZ,FRANCISCO JOSE.
Fecha de Solicitud: 23 de Noviembre de 2010.
Fecha de Publicación: .
Fecha de Concesión: 6 de Julio de 2011.
Clasificación PCT:
- A63B27/00 NECESIDADES CORRIENTES DE LA VIDA. › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63B MATERIAL PARA LA EDUCACION FISICA, GIMNASIA, NATACION, ESCALADA O ESGRIMA; JUEGOS DE PELOTA; MATERIAL DE ENTRENAMIENTO (aparatos para gimnasia pasiva, masaje A61H). › Aparatos para trepar por mástiles, árboles o similares (cinturones de seguridad para trepadores A62B 35/00).
- B62D57/024 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 57/00 Vehículos caracterizados por medios de propulsión o de contacto con el suelo diferentes de ruedas y orugas, solos o complementando a las ruedas o a las orugas (trineos B62B; trineos de motor B62M). › Vehículos de orugas especialmente adaptados para desplazarse sobre superficies inclinadas o verticales (vehículos oruga para subir o bajar escaleras B62D 55/075; coches que permiten subir o bajar un tramo de escalera B62B 5/02).
- B66B9/02 B […] › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66B ASCENSORES; ESCALERAS O PASILLOS MECANICOS (dispositivos salvavidas utilizados como alternativa a los medios de salida normales, p. ej. escaleras, durante el rescate, para hacer descender a las personas de los edificios u otras estructuras análogas, en jaulas, bolsas, o soportes similares A62B 1/02; equipamiento para la manipulación de cargars o para facilitar el embarque de pasajeros o similar B64D 9/00; dispositivos de frenado o de parada caracterizados por su aplicación a los mecanismos de elevación o izado B66D 5/00). › B66B 9/00 Clases o tipos de ascensores instalados en los edificios o adyacentes a éstos (caracterizados por el sistema de control B66B 1/00). › accionados mecánicamente de forma diferente a por cables o calabrotes.
Fragmento de la descripción:
Plataforma robótica para el ascenso a postes.
Objeto de la invención y Sector de la técnica
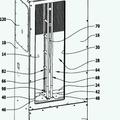
La presente invención se refiere a una plataforma robótica portátil para el ascenso a postes o tubos, que comprende un bastidor formado por cuatro sectores semicirculares, articulados dos a dos en planos paralelos, que una vez cerrados abrazan el tubo o poste. También comprende dos uniones que unen los sectores semicirculares del bastidor, una de ellas es una unión fija articulada, y la otra una unión desmontable que permite cerrar la plataforma y que ésta abrace al tubo o poste. Además comprende una cubierta que protege al conjunto y aloja accesorios, y al menos tres ruedas, dispuestas radialmente respecto al poste que están en contacto con la superficie del poste cuando la plataforma está cerrada sobre él, y que mantienen a la plataforma nivelada. También comprende un mecanismo de presión que presiona las ruedas contra el poste, unos medios motores, unos medios de transmisión, y unos medios de control remoto de la plataforma robótica.
La invención resulta de aplicación en aquellos sectores en los que se diseñen, fabriquen, produzcan o utilicen plataformas robóticas elevadoras, como por ejemplo el de maquinaria y equipo mecánico, el de material y equipo eléctrico, electrónico y óptico, o material para el transporte.
Estado de la técnica
Existe una variedad de robots trepadores, algunos destinados a tareas específicas, y otros son de ámbito general. Se basan en distintos principios y presentan diferencias sustanciales en diseño y/o prestaciones, siendo por lo común, poco eficientes energéticamente.
Así, por ejemplo, existen robots escaladores de muros actuados por ventosas (US 005551525) o por electroimanes (US 003811320), y cuyo mayor inconveniente es que requieren un consumo continuo de energía, incluso para mantener una posición estáticamente estable, amén de la complejidad electro-mecánica que exhiben debido a su principio de actuación.
La patente US 005542496 describe un robot para limpieza y pintado de farolas que incluye un sistema neumático regulado que le permite adaptarse a la conicidad de las farolas y moverse de manera estabilizada. El principio de actuación y los componentes que lo forman implican una gran complejidad y un peso elevado. Por tanto se trata de un robot pesado, y con una capacidad de carga útil reducida ya que una gran cantidad de la energía tractora se debe emplear en desplazar su propio peso. Además, es poco eficiente energéticamente, ya que de nuevo es necesario un continuo aporte energético incluso en posición inmóvil.
En otro campo de aplicación, existen las patentes US 002581479, US 2477922 y US 2482392 que presentan robots para limpieza y poda de arbolados basados en una plataforma cerrada entorno a los árboles que de nuevo incorporan mecanismos de cierre complejos y regulados. En estos casos, los robots están destinados a una tarea muy específica (poda y serrado de materia vegetal de calibre medio o medio-grueso) que es gran consumidora de energía por principio y que además requiere que el robot tenga unos condicionantes de diseño que los hacen muy poco eficientes energéticamente y voluminosos.
Tratando de cubrir necesidades multi-propósito, es decir, con una aplicabilidad similar al robot de la presente invención, existen soluciones como la planteada en la patente WO 2009/118409 A1, en la que se presenta un robot escalador de postes basado en un mecanismo de fijación por bloqueo en cuña, lo que asegura su nulo consumo eléctrico en posición de reposo (lo cual se logra únicamente con la rueda que otorga la tracción bloqueada o frenada). Dicho robot exhibe una peculiaridad importante, que es que no necesita rodear por completo al poste sobre el que ha de moverse, lo cual le dota de la capacidad de poder sortear obstáculos cercanos al poste. Desde el punto de vista geométrico y dinámico, este robot basa su fijación al poste en un fenómeno de bloqueo mecánico que requiere que el centro de masas del sistema esté en una posición excéntrica respecto al poste (condición para bloqueo en cuña). La manera en la que se soporta el robot al poste introduce una fuerza normal muy alta sobre la rueda tractora, lo que hace necesario un gran esfuerzo del motor para vencer el par de rodadura. Lo que es más, este gran par de rodadura puede resultar en un bloqueo total si el robot se encuentra con una irregularidad en el poste (el motor no tiene potencia para vencer el par de rodadura si el robot se encuentra con un abollón, por ejemplo). Además, el volumen útil de carga ha de estar localizado en una parte muy determinada del robot para que se cumpla el principio de sustentación por bloqueo en cuña. Como resultado, las prestaciones alcanzadas por este tipo de robot no son adecuadas para una herramienta portátil de propósito general. Por otra parte, el sistema de tracción de este robot incluye un mecanismo que permite girar al robot en torno al poste durante su movimiento de ascenso y por lo tanto incorpora una gran complejidad mecánica en el conjunto motor-tracción (embrague, diversos mecanismos sobre el eje de la rueda tractora).
Descripción de la invención
La presente invención se refiere a una plataforma robótica motorizada, que por rodadura puede subir sobre postes, columnas o tubos incluyendo a los que tienen forma recta o cónica, o secciones cilíndricas o faceteadas.
La plataforma robótica para el ascenso de tubos o postes objeto de esta invención comprende:
- Un bastidor formado por cuatro sectores semicirculares, articulados dos a dos en planos paralelos, que una vez cerrados abrazan el tubo o poste. El bastidor es la estructura base sobre la que se disponen el resto de elementos de la plataforma. Los sectores semicirculares, una vez unidos forman dos círculos superpuestos en planos paralelos, que se unen mediante separadores o montantes.
- Dos uniones que unen los sectores semicirculares del bastidor, una de ellas es una unión fija articulada, y la otra una unión desmontable que permite cerrar la plataforma y que ésta abrace al tubo o poste.
- Una cubierta que protege al conjunto y aloja accesorios.
- Al menos tres ruedas, con al menos una de ellas motriz, dispuestas radialmente respecto al poste, con unas trayectorias que siguen el eje vertical del poste, que están en contacto con la superficie del poste cuando la plataforma está cerrada sobre él, y que mantienen a la plataforma nivelada.
- Un mecanismo de presión asociado a cada conjunto de ruedas que presiona las ruedas contra el poste para proporcionar adherencia y fuerza de tracción.
- Unos medios motores.
- Unos medios de transmisión de la energía de los medios motores a la rueda o ruedas motrices.
- Unos medios de control remoto de la plataforma robótica.
La disposición de tres ruedas ofrece una gran estabilidad del dispositivo, al mantener el centro de masas de la plataforma inscrito dentro de la sección del poste. Una configuración con el centro de masas de la plataforma centrado en el eje del poste ofrece la disposición más estable. El bastidor cerrado alrededor del poste además de mejorar aún más la estabilidad del dispositivo, asegura el reparto de las tensiones de manera homogénea en toda la estructura. De esta forma la plataforma permanece estable aun soportando una carga grande o ante perturbaciones desestabilizadoras, como por ejemplo un vendaval.
A efectos de esta invención y su descripción, el término ruedas debe entenderse como cualquier pieza mecánica, generalmente circular, que gira alrededor de un eje, incluyendo a las ruedas, los rodillos, las ruedas esféricas y a las poleas.
En una realización preferida, al menos el bastidor, las uniones, la cubierta, y las llantas de las ruedas son de aluminio, plástico, fibra, o una multicapa de materiales.
En otra realización preferida, los accesorios sobre la cubierta son una cámara, una vídeo cámara, una estación metereológica, un manipulador, una señal acústica, una señal luminosa, un transmisor, una antena, unos medios de soldadura o unos medios de pintura.
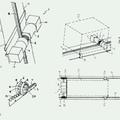
En otra realización preferida, la plataforma además comprende al menos tres portaruedas articulados que aseguran el contacto de las ruedas con el poste. Los portaruedas también se disponen de forma radial respecto al poste. En una realización más preferida, cada portaruedas articulado aloja un par de ruedas dispuestas una detrás de otra según el sentido de avance de la plataforma. En una realización aún más preferida, al menos un...
Reivindicaciones:
1. Plataforma robótica para el ascenso de tubos o postes que comprende:
caracterizada porque al menos el bastidor (1), las uniones (6), la cubierta (7), y las llantas de las ruedas (2) son de aluminio, plástico, fibra, o una multicapa de materiales.
2. Plataforma robótica según la reivindicación 1 caracterizada porque los accesorios sobre la cubierta (7) son una cámara, una vídeo cámara, una estación metereológica, un manipulador, una señal acústica, una señal luminosa, unos medios de soldadura o unos medios de pintura.
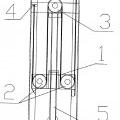
3. Plataforma robótica según la reivindicación 1 caracterizada porque además comprende al menos tres portaruedas (5) articulados que aseguran el contacto de las ruedas (2) con el poste.
4. Plataforma robótica según la reivindicación 3 caracterizado porque cada portaruedas (5) articulado aloja un par de ruedas (2) dispuestas una detrás de otra según el sentido de avance de la plataforma. Dicho portaruedas caracterizado también por tener un movimiento de cabeceo respecto del brazo que lo soporta con un ángulo limitado que permite su adaptación a la conicidad del poste.
5. Plataforma robótica según la reivindicación 4 caracterizado porque al menos un par de ruedas (2) alojadas en un portaruedas (5) son motrices.
6. Plataforma robótica según la reivindicación 1 o 4 caracterizada porque todas las ruedas (2) son motrices.
7. Plataforma robótica según la reivindicación 1 caracterizada porque el mecanismo de presión (3) comprende un resorte de compresión con intensidad de presión regulable.
8. Plataforma robótica según la reivindicación 1 caracterizada porque los medios motores son al menos un motor eléctrico alimentado por baterías.
9. Plataforma robótica según la reivindicación 1 caracterizada porque los medios de transmisión comprenden un motoreductor (4) y una transmisión mecánica (8).
10. Plataforma robótica según la reivindicación 1 caracterizada porque los medios de control (12) remoto son inalámbricos y además comprenden un mando a distancia accionable por el usuario.
11. Plataforma robótica según la reivindicación 10 caracterizada porque los medios de control (12) también controlan los accesorios que se alojan sobre la cubierta (7).
Patentes similares o relacionadas:
Sistema de suministro de energía para ascensores de piñón y cremallera y método para alimentar estos, del 18 de Septiembre de 2019, de Alimak Group Sweden AB: Un sistema de suministro de energía para un ascensor del tipo en el que la maquinaria de accionamiento se soporta por un portador de carga y se acciona […]
Método y dispositivo para el suministro de alimentación para ascensores de piñón y cremallera, del 13 de Septiembre de 2019, de Alimak Hek AB: Un método para lograr un sistema de suministro de alimentación para una ascensor del tipo en el que la maquinaria de accionamiento está soportada por […]
Amortiguador de vibración para sistema de propulsión lineal de ascensor, del 12 de Septiembre de 2018, de OTIS ELEVATOR COMPANY: Un conjunto de propulsión lineal para impartir una fuerza sobre una cabina en un hueco de ascensor de un sistema de […]
Unidad de elevación para ascender y descender un andamio, del 31 de Mayo de 2017, de Keersmaekers, Marc: Una unidad de elevación para ascender y descender en un eje formado por una columna de andamio (L0, L1, L2) de un andamio, la columna de […]
Instalación elevadora subterránea, del 13 de Abril de 2016, de WINDHOFF BAHN- UND ANLAGENTECHNIK GMBH: Instalación elevadora subterránea , con un dispositivo elevador que presenta elementos portadores que pueden desplazarse hacia arriba […]
 Dispositivo de elevación, del 27 de Enero de 2016, de ThyssenKrupp Encasa S.r.l: Dispositivo de elevación que comprende una cabina de ascensor con un compartimiento de pasajeros y un cabrestante de cable dispuesto en la cabina […]
Dispositivo de elevación, del 27 de Enero de 2016, de ThyssenKrupp Encasa S.r.l: Dispositivo de elevación que comprende una cabina de ascensor con un compartimiento de pasajeros y un cabrestante de cable dispuesto en la cabina […]
 Ascensor con accionamiento por piñones de rodillos, del 20 de Enero de 2016, de INVENTIO AG: Ascensor que comprende:
una cabina que se puede desplazar dentro de una caja de ascensor;
dos cremalleras que se extienden a lo largo de la caja de ascensor, […]
Ascensor con accionamiento por piñones de rodillos, del 20 de Enero de 2016, de INVENTIO AG: Ascensor que comprende:
una cabina que se puede desplazar dentro de una caja de ascensor;
dos cremalleras que se extienden a lo largo de la caja de ascensor, […]
 Unidad de accionamiento para desplazar cargas y pasajeros, así como dispositivos para desplazar personas y cargas con estas unidades de accionamiento, del 9 de Septiembre de 2015, de SHS Vermarktung UG (haftungsbeschränkt) & Co. Kg: Unidad de accionamiento para desplazar cargas y personas, que comprende un husillo accionado por un motor que actúa sobre una tuerca a la que se fijan […]
Unidad de accionamiento para desplazar cargas y pasajeros, así como dispositivos para desplazar personas y cargas con estas unidades de accionamiento, del 9 de Septiembre de 2015, de SHS Vermarktung UG (haftungsbeschränkt) & Co. Kg: Unidad de accionamiento para desplazar cargas y personas, que comprende un husillo accionado por un motor que actúa sobre una tuerca a la que se fijan […]