MÉTODO PARA SEGMENTACIÓN MEJORADA DE IMÁGENES.
Un método para identificar objetos en una imagen, comprendiendo dicho método las etapas de:
a) clasificación de los píxeles basándose en un intervalo de valores en el píxel de un atributo simple de dicha imagen; b) generación de una imagen de etiquetado que comprende el comienzo con una imagen de etiquetado en blanco y la colocación de dichos píxeles clasificados, uno por uno, sobre la imagen de etiquetado en blanco en una localización en la imagen de etiquetado que corresponde a la localización de dichos píxeles en dicha imagen, comenzando con un punto extremo en dicho intervalo de valores de píxel, asignándose a cada píxel un valor que corresponde a un nuevo objeto, un objeto existente, o un objeto mezclado, en el que los píxeles colocados que no tocan un objeto existente corresponden a nuevos objetos, a los píxeles colocados que tocan un objeto existente se les asigna a un valor correspondiente a ese objeto particular, y a los píxeles colocados que unen dos objetos existentes se les asigna un valor que corresponde a los objetos mezclados; c) actualización de las características de los objetos generados en la imagen de etiquetado según cada píxel clasificado se coloca en la imagen de etiquetado; d) generación de una imagen de salida que comprende la información de los límites sobre los objetos si dichas características de dichos objetos satisfacen un criterio de aceptación predefinido; y e) realización de las etapas b, c y d repetidamente hasta que se alcanza un punto de detención, representando dicho punto de detención otro punto extremo en dicho intervalo de valores de píxel
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2006/000726.
Solicitante: CYTYC CORPORATION.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 250 CAMPUS DRIVE MARLBOROUGH, MA 01752 ESTADOS UNIDOS DE AMERICA.
Inventor/es: ZAHNISER,MICHAEL.
Fecha de Publicación: .
Fecha Solicitud PCT: 10 de Enero de 2006.
Fecha Concesión Europea: 11 de Agosto de 2010.
Clasificación PCT:
- G06T5/00 FISICA. › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Perfeccionamiento o restauración de imagen.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
Fragmento de la descripción:
ANTECEDENTES DE LA INVENCIÓN
Solicitud relacionada
Esta solicitud reivindica el beneficio prioritario y no es provisional de la Solicitud Provisional de Estados Unidos Nº 60/642.110 presentada el 10 de enero de 2005, que se incorpora en el presente documento por referencia en su totalidad.
Campo de la invención
La presente invención se refiere de modo general al campo del análisis de imágenes. Más específicamente, la presente invención se refiere a un novedoso método de segmentación de imágenes.
Comentarios sobre la técnica anterior
En patología o citología, es deseable a menudo localizar y medir células o núcleos usando un instrumento automatizado o semiautomatizado. Dichos instrumentos se pueden usar para investigación o para pruebas diagnósticas. Un ejemplo de éste último es la prueba diagnóstica del cáncer de cérvix usando el ensayo de Papanicolou (o ensayo de Pap). Estos instrumentos obtienen y analizan imágenes digitales para localizar células de interés o para clasificar transparencias como normales o sospechosas.
En el análisis de objetos en imágenes digitales es esencial que los objetos se distingan del fondo de la imagen. Para caracterizar las células u objetos, deben localizarse primero los objetos. El proceso de localización de objetos dentro de la imagen digital se conoce como “segmentación”. Se usan una variedad de técnicas en el proceso de segmentación para localizar los objetos de interés de modo que un análisis por ordenador posterior pueda caracterizar los objetos. Por ejemplo, la segmentación de una imagen que contenga células podría permitir localizar el núcleo y/o citoplasma de la célula.
Un enfoque tradicional de la tarea de localizar y clasificar objetos dentro de una imagen involucra varias etapas: primero -la segmentación de la imagen para crear una máscara binaria de los objetos; a continuación -el etiquetado de los objetos en esta máscara, con cada conjunto de píxeles conectados asignado a una etiqueta diferente y finalmente -la medición de varias características de los objetos etiquetados.
Una de las técnicas usadas para la segmentación de imágenes es la “formación de umbrales”. En esta técnica, se elige un valor de brillo de la imagen y se compara cada píxel de la imagen con este valor de umbral. Los píxeles con un valor de brillo por encima de ese umbral se consideran píxeles de fondo; los píxeles con valores por debajo del umbral se consideran píxeles del objeto. El valor de umbral para la localización de objetos se puede elegir basándose en un histograma de la imagen, que es una distribución de frecuencias de los valores de oscuridad encontrados dentro de una imagen. Un algoritmo de formación de umbrales puede encontrar un valor de umbral único usando estos histogramas. Por ejemplo, el valor de umbral podría estar a medio camino entre los píxeles más oscuros y más brillantes. Alternativamente, el valor de umbral se podría elegir como un punto de inflexión entre los píxeles abundantes de “fondo” y los más raros píxeles del “objeto”. Encontrar un umbral ideal para cada objeto en una imagen es una tarea difícil. A menudo un valor de umbral único no es lo óptimo para múltiples objetos con valores de oscuridad variables dentro de una imagen completa.
Una vez se elige el valor de umbral y se completa el proceso de formación de umbrales, los píxeles del “objeto” pueden formar una máscara binaria de los objetos en la imagen. Se podrían usar unos límites alrededor de la máscara para representar cada objeto. Los límites podrían o no reflejar el objeto con precisión. Se han desarrollado muchos métodos para refinar los límites una vez están localizados. Tales métodos pueden usar la información de la oscuridad cerca de los límites, o restricciones tales como el gradiente, curvatura, “proximidad a un círculo”, etc. para refinar los límites.
Las técnicas actualmente conocidas para la segmentación de imágenes son a menudo complejas y consumidoras de tiempo. Estas técnicas no siempre producen una elevada precisión en el proceso de segmentación, particularmente si hay un pequeño contraste entre el objeto a localizar y el fondo que lo rodea. Consecuentemente, los algoritmos de segmentación actuales fallan a menudo en la localización de modo adecuado de los objetos. En análisis de imágenes de células, por ejemplo, se podía detectar incorrectamente un núcleo de célula porque el límite localizado es demasiado grande o demasiado pequeño. Esto podría dar como resultado casos de falsos positivos (el instrumento detecta incorrectamente un objeto normal como sospechoso) o falsos casos negativos (el instrumento no detecta un objeto en verdad sospechoso).
La Solicitud de Patente Internacional WO 01/11564 se refiere a un método de procesamiento de imágenes que usa técnicas de formación de umbrales convencionales. Los píxeles en o por encima de un valor de intensidad de umbral en la imagen original se extraen y ocupan una matriz de datos intermedia. Se realizan ensayos sobre la matriz de datos intermedia para determinar si el área en el plano de intensidad es consistente con una característica que se ha de detectar. Estas formas que son consistentes se aceptan y los píxeles equivalentes en la imagen original se copian y guardan en una imagen final. No hay clasificación de los píxeles basándose en ningún atributo. Ni hay ninguna creación de un etiquetado de imágenes píxel por píxel para formar objetos. De modo similar, no hay descripción de las características actualizadas de los objetos formados y a continuación la generación de una imagen resultante cuando las características se ajusten a los criterios de aceptación definidos previamente.
Matas y col., (Electronic Proceedings of the 13th British Machine Vision Conference, 2002, 384-393) describe una estructura de datos que contienen áreas de objeto. Esa estructura de datos se debe procesar a continuación en una etapa separada para encontrar el mínimo local en la relación de cambio de la función de área y aún en otra etapa se debe reconstruir la segmentación para ese nivel de intensidad.
Hay una necesidad de una segmentación mejorada para el procesamiento automatizado de imágenes y dispositivos de procesamiento automatizado de imágenes, en particular para la identificación con precisión de los límites de objetos.
Independientemente de los méritos, característicos y ventajas precisas de las técnicas de segmentación actualmente conocidas, ninguna de ellas alcanza o completa las finalidades de la presente invención.
SUMARIO DE LA INTENCIÓN
La presente invención proporciona un método para identificar objetos en una imagen según se define en las reivindicaciones adjuntas.
La presente invención proporciona un artículo de fabricación como se define en las reivindicaciones adjuntas.
BREVE DESCRIPCIÓN DE LOS DIBUJOS
La Figura 1 ilustra un “mapa de contorno” del brillo sobrepuesto a las células en un grupo de células.
La Figura 2 ilustra las etapas del algoritmo de segmentación de imágenes, de acuerdo con una realización de la presente invención.
Las Figuras 3a-3n ilustran colectivamente el procesamiento durante la adición de píxeles en una imagen etiquetada, de acuerdo con una realización de la presente invención.
La Figura 4 ilustra las etapas de un algoritmo de segmentación de imágenes, de acuerdo con una realización preferida de la presente invención.
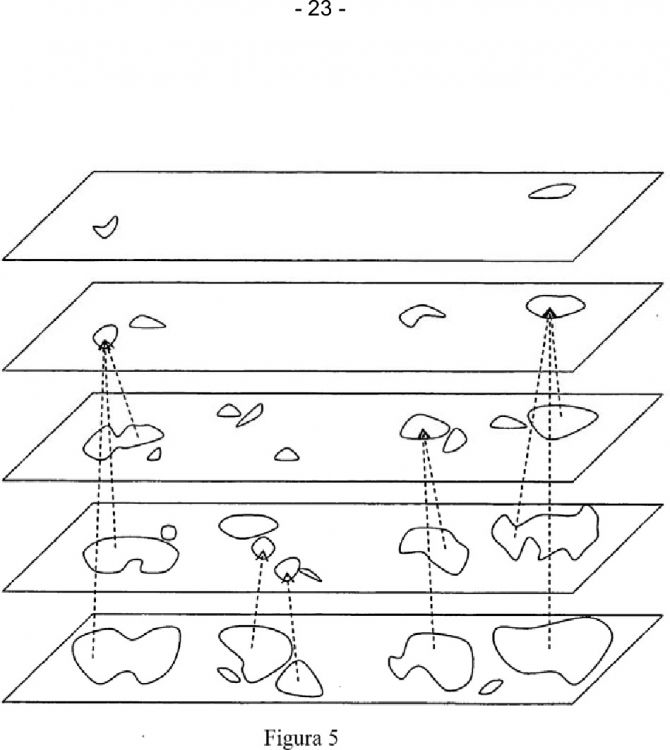
La Figura 5 representa el crecimiento de objetos en una imagen en cinco valores de umbral diferentes, de acuerdo con una realización de la presente invención.
La Figura 6 ilustra la imagen de salida que muestra los objetos que se localizaron en diferentes valores de umbral en el que sólo se retiene el mejor estado de un objeto, de acuerdo con una realización de la presente invención.
DESCRIPCIÓN DE LAS REALIZACIONES PREFERIDAS
En tanto que la invención se ilustra y se describe en una realización preferida, la invención se puede aplicar y producir con muchas configuraciones diferentes. Se representa en los dibujos, y se describirá en el presente documento con detalle, una realización preferida de la invención, bien entendido que la presente descripción se ha de considerar como una ejemplificación de los principios...
Reivindicaciones:
1. Un método para identificar objetos en una imagen, comprendiendo dicho método las etapas de:
a) clasificación de los píxeles basándose en un intervalo de valores en el píxel de un atributo simple de dicha imagen; b) generación de una imagen de etiquetado que comprende el comienzo con una imagen de etiquetado en blanco y la colocación de dichos píxeles clasificados, uno por uno, sobre la imagen de etiquetado en blanco en una localización en la imagen de etiquetado que corresponde a la localización de dichos píxeles en dicha imagen, comenzando con un punto extremo en dicho intervalo de valores de píxel, asignándose a cada píxel un valor que corresponde a un nuevo objeto, un objeto existente, o un objeto mezclado, en el que los píxeles colocados que no tocan un objeto existente corresponden a nuevos objetos, a los píxeles colocados que tocan un objeto existente se les asigna a un valor correspondiente a ese objeto particular, y a los píxeles colocados que unen dos objetos existentes se les asigna un valor que corresponde a los objetos mezclados; c) actualización de las características de los objetos generados en la imagen de etiquetado según cada píxel clasificado se coloca en la imagen de etiquetado; d) generación de una imagen de salida que comprende la información de los límites sobre los objetos si dichas características de dichos objetos satisfacen un criterio de aceptación predefinido; y e) realización de las etapas b, c y d repetidamente hasta que se alcanza un punto de detención, representando dicho punto de detención otro punto extremo en dicho intervalo de valores de píxel.
2. Un método para identificar objetos en una imagen, de acuerdo con la reivindicación 1, en el que dichos píxeles se clasifican basándose en cualquiera de los siguientes atributos: brillo, matiz o gradiente.
3. Un método para identificar objetos en una imagen, de acuerdo con la reivindicación 1, en el que dichas características de dichos objetos se calculan
basándose en el píxel colocado y los cuatro píxeles vecinos más próximos.
4. Un método para identificar objetos en una imagen, de acuerdo con la reivindicación 1, en el que dicha imagen de salida se genera si dichas características de los objetos calculados cuando se coloca dicho píxel clasificado son una mejor coincidencia con dicho criterio de aceptación que dichas características del objeto calculadas para todos los píxeles colocados previamente.
5. Un método para identificar objetos en una imagen, de acuerdo con la reivindicación 1, en el que dicho método se realiza sobre imágenes en dos o tres dimensiones de aplicaciones biológicas o no biológicas.
6. Un método para identificar objetos en una imagen, de acuerdo con la reivindicación 5, en el que dichos objetos en dichas aplicaciones biológicas son cualquiera de los siguientes: células, núcleos, citoplasmas, inclusiones nucleares o citoplasmáticas, agrupaciones de células u objetos dentro de las imágenes producidos mediante dispositivos de procesamiento de imágenes tales como rayos X, escáneres TAC o procesamiento de imágenes por resonancia magnética.
7. Un método para identificar objetos en una imagen, de acuerdo con la reivindicación 5, en el que dichos objetos en dichas aplicaciones no biológicas son cualquiera de los siguientes: componente sobre una tarjeta de circuito impreso u objetos artificiales o naturales en una imagen de satélite.
8. Un método para identificar objetos en una imagen, de acuerdo con la reivindicación 1, en el que dichas características son cualquiera de las siguientes: perímetro, área, momento de inercia del objeto, excentricidad, ejes de la elipse, mejor adaptación a la una elipse, contraste, valor de gris, densidad óptica media, desviación estándar o textura.
9. Un método para identificar objetos en una imagen, de acuerdo con la reivindicación 1, en el que dicho criterio de aceptación es cualquiera de los siguientes: tamaño, forma, textura, color o densidad.
10. Un método para identificar objetos en una imagen, de acuerdo con la
reivindicación 1, en el que dicho método usa múltiples criterios de aceptación para identificar diferentes clases de objetos simultáneamente en dicha imagen.
11. Un método para identificar objetos en una imagen, de acuerdo con la reivindicación 1, en el que dicho punto de detención es un punto que representa los valores de los píxeles de fondo en dicho intervalo de valores de píxel o un punto que representa uno los valores de píxel no relacionados con dichos objetos a localizar.
12. Un artículo de fabricación que comprende un medio que pueda leer un ordenador que tiene un código de programas que pueda leer un ordenador incluido en él que identifique objetos en una imagen, comprendiendo dicho medio:
a) un código de programa que pueda leer un ordenador que clasifique los píxeles basándose en un intervalo de valores de píxel de un atributo simple de dicha imagen; b) un código de programa que pueda leer un ordenador configurado para colocar dichos píxeles clasificados, uno por uno, sobre una imagen de etiquetado inicialmente en blanco, comenzando con un punto extremo en dicho intervalo de valores de píxel, asignándose a cada píxel un valor que corresponde a un nuevo objeto, un objeto existente, o un objeto mezclado, en el que los píxeles colocados que no tocan un objeto existente corresponden a nuevos objetos, a los píxeles colocados que tocan un objeto existente se les asigna un valor correspondiente a ese objeto particular, y a los píxeles colocados que unen dos objetos existentes se les asigna un valor que corresponde a los objetos mezclados; c) un código de programa que pueda leer un ordenador configurado para actualizar las características de los objetos generados en la imagen de etiquetado según cada píxel clasificado se coloca en la imagen de etiquetado; d) un código de programa que pueda leer un ordenador que configurado para generar una imagen de salida que comprenda la información de los límites sobre los objetos si dichas características de dichos objetos satisfacen un criterio de aceptación predefinido; y e) un código de programa que pueda leer un ordenador que realiza las etapas (b) a (d) repetidamente hasta que se alcanza un punto de detención, representando dicho punto de detención otro punto extremo en dicho intervalo de valores de píxel.
13. Un artículo de fabricación que comprende un medio que pueda leer un ordenador que tenga un código de programa que pueda leer un ordenador incluido en él que identifique objetos en una imagen, de acuerdo con la reivindicación 12, en el que dicho punto de detención es un punto que representa los valores de píxeles de fondo en dicho intervalo de valores de píxel o un punto que representa valores
10 de píxel no relacionados con dichos objetos a localizar.
Patentes similares o relacionadas:
MÉTODO Y SISTEMA PARA CONVERTIR UNA IMAGEN DIGITAL DE COLOR A ESCALA DE GRISES, del 16 de Julio de 2020, de UNIVERSIDAD NACIONAL DE EDUCACION A DISTANCIA (UNED): Se describe un método y sistema para convertir una imagen en color a escala de grises aplicable dentro del campo del tratamiento de imágenes […]
Dispositivo y método de procesamiento de imágenes, del 15 de Julio de 2020, de DOLBY INTERNATIONAL AB: Un dispositivo de procesamiento de imágenes para producir una imagen restaurada a partir de una imagen degradada de entrada, comprendiendo la imagen […]
Mejora de imagen endoscópica usando ecualización de histograma adaptativo limitado por contraste (CLAHE) implementada en un procesador, del 1 de Julio de 2020, de EndoChoice, Inc: Un procedimiento para mejorar imágenes obtenidas por al menos dos elementos de visualización en un sistema de endoscopio usando un algoritmo de ecualización […]
Un sistema de rayos X con procedimientos implementados por ordenador para el procesamiento de imágenes, del 10 de Junio de 2020, de ControlRAD Systems Inc: Un sistema de rayos X que comprende una fuente de rayos X, al menos un filtro de rayos X parcialmente transparente, un detector de rayos X, un monitor para desplegar imágenes […]
Método y dispositivo de procesamiento de imágenes, del 11 de Marzo de 2020, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un método de procesamiento de imágenes, que comprende: controlar una primera cámara para capturar una pluralidad de primeras imágenes […]
Procedimiento de procesamiento de imágenes y dispositivo electrónico que implementa el mismo, del 4 de Marzo de 2020, de SAMSUNG ELECTRONICS CO., LTD.: Un procedimiento de procesamiento de una imagen en un dispositivo electrónico, comprendiendo el procedimiento: predecir el número […]
Método para la fusión de imágenes de Resonancia Magnética y Tomografía Computerizada en un archivo imprimible en 3D para su uso en fabricación aditiva, del 2 de Marzo de 2020, de SERVICIO DE RADIOLOGIA COMPUTERIZADA SL: Este método se enmarca en el campo de las herramientas de visualización tridimensional interactiva para el apoyo e interpretación de la planificación prequirúrgica […]
Método y dispositivo de procesamiento de imágenes, medio de almacenamiento legible por computadora y dispositivo electrónico, del 26 de Febrero de 2020, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un método de procesamiento de imágenes implementado por computadora, que comprende: seleccionar una imagen de referencia de entre una pluralidad […]