Sistema de medición multidimensional.
Un sistema de medición multidimensional que comprende:
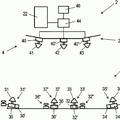
una unidad de seguimiento (100) que emite luz láser (110,
210, 310, 1410) y lleva a cabo un seguimiento usando coordenadas esféricas;
un blanco (150, 1450) en comunicación con la unidad de seguimiento (100), siendo el blanco (150, 1450) capaz de hacer movimientos de inclinación, oscilación y balanceo;
un módulo de determinación de distancia que determina una distancia entre la unidad de seguimiento (100) y el blanco (150, 1450);
un módulo de salida (200) que envía información de posición relativa al blanco (150, 1450) respecto a la unidad de seguimiento (100) en función de las coordenadas esféricas, los movimientos de inclinación, oscilación y balanceo y la distancia y
una unidad remota (700, 800, 1200) está asociada al sistema de medición multidimensional, comprendiendo la unidad remota el blanco (150, 1450) y un ensamblaje de sonda (600, 1100, 1210) acoplado al blanco (150, 1450), el ensamblaje de sonda (600, 1100, 1210) comprende una punta de sonda (620, 1260), una varilla de sonda (610) y una base de sonda (730), en el que la punta de sonda (620, 1260) está configurada para llegar a ubicaciones que no están en una línea de visibilidad entre la unidad de seguimiento (100) y el blanco (150, 1450),
caracterizado porque la determinación del movimiento de balanceo se basa en al menos una de una comparación entre un componente de polarización horizontal (214) de la luz láser (210, 310) y un componente de polarización vertical (213) de la luz láser (210, 310).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2003/026493.
Solicitante: LAU, KAM C.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 12700 GREENBIER ROAD POTOMAC, MD 20854 ESTADOS UNIDOS DE AMERICA.
Inventor/es: LAU,KAM C.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B11/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00).
- G01B11/26 G01B […] › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para la medida de ángulos o conicidades; para ensayar la alineación de ejes.
- G01C15/00 G01 […] › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Instrumentos o accesorios topográficos no previstos en los grupos G01C 1/00 - G01C 13/00.
- G01S17/66 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › Sistemas de seguimiento que utilizan ondas electromagnéticas que no sean ondas de radio.
- G01S5/16 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › que utilizan ondas electromagnéticas que no sean ondas de radio.
- G01S7/499 G01S […] › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › que utilizan efectos de polarización.
- G05B1/00 G […] › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › Elementos de comparación, es decir, elementos para efectuar la comparación directa o indirectamente entre un valor deseado y los valores existentes o previstos (comparación de la fase o de la frecuencia de dos señales eléctricas H03D 13/00).
PDF original: ES-2541303_T3.pdf
Fragmento de la descripción:
Sistema de medición multidimensional.
Esta solicitud reivindica el beneficio de la solicitud provisional estadounidense n° 6/45.712 presentada el 26 de agosto de 22 y de la solicitud estadounidense n° 1/646.745 presentada el 25 de agosto de 23.
ANTECEDENTES
Campo de la invención
En general, la presente Invención se refiere a un sistema de medición. En particular, los sistemas y procedimientos de esta Invención están dirigidos a un sistema de seguimiento láser multidimensional.
Antecedentes de la invención
Los sistemas de medición de precisión tienen una gran variedad de aplicaciones. Por ejemplo, en robótica, con frecuencia es necesario el posicionamiento y la orientación exactos de un robot. Para lograr un alto grado de precisión se puede usar un sistema de medición de posición de robots. Normalmente, un sistema de este tipo usa un 2 interferómetro de haz láser para determinar la posición y/o la orientación de un efector terminal del robot. Dicho sistema puede controlar la posición y orientación del efector terminal del robot en tiempo real mientras proporciona datos de exactitud, velocidad y medición.
En el documento WO1/77613A1 se describe un sistema de medición que comprende un sistema de medición base 25 y un escáner de líneas láser montado en una muñeca de un robot industrial convencional. El sistema de medición puede medir puntos de un objeto de medición que no están en la línea de visibilidad directa del sistema de medición base. El escáner de líneas láser se puede mover de manera independiente por medio del robot de seis grados de libertad y proporciona datos de medición para determinar la distancia entre el escáner de líneas láser y un punto de un objeto de medición. Al menos un blanco está acoplado al escáner de líneas láser o a la muñeca. Según una 3 forma de realización, el sistema de medición base comprende tres seguidores láser y un procesador. Cada seguidor láser sigue a uno de los blancos. El procesador determina la posición y la orientación del escáner de líneas láser respecto al sistema de medición.
El documento US5.92.394 se refiere a una medidora óptica por coordenadas para medir el contorno o las 35 dimensiones de un objeto dispuesto en una habitación. La medidora comprende una unidad central, ensamblajes de transmisores y una sonda portátil. Cada ensamblaje de transmisores está dispuesto en una ubicación fija de la habitación e incluye un primer transmisor y un segundo transmisor. La sonda incluye una base, un primer retrorreflector, un segundo reflector, una primera fuente de luz, una segunda fuente de luz y una punta. Para medir el objeto, se atraviesa el objeto con la punta. La posición de la punta se determina siguiendo la sonda por medio de los 4 ensamblajes de transmisores, como seguidores láser.
Por ejemplo, en la patente estadounidense del solicitante n° 4.714.339 se analiza un Three and Five Axis Láser Tracking System (Sistema de seguimiento láser de tres y cinco ejes) y en la patente estadounidense del solicitante n° 6.49.377 se analiza un Five-Axis/Six-Axis Láser Measuring System (Sistema de medición láser de cinco ejes/seis 45 ejes). Además, para proporcionar una descripción adicional para la presente invención también se cita la solicitud estadounidense del solicitante n° 6/377.596, titulada "IMine Dimensional Láser Tracking System and Method" que se presentó el 6 de mayo de 23.
BREVE RESUMEN DE LA INVENCIÓN
Un aspecto de la invención proporciona un sistema de medición multidimensional que incluye una unidad de seguimiento, un blanco, un módulo de determinación de distancia y un módulo de salida. La unidad de seguimiento emite una luz láser y lleva a cabo el seguimiento usando coordenadas esféricas. El blanco está en comunicación con la unidad de seguimiento. El blanco es capaz de hacer movimientos de inclinación, oscilación y balanceo. El módulo 55 de determinación de distancia determina una distancia entre la unidad de seguimiento y el blanco. El módulo de salida envía información de posición relativa al blanco respecto a la unidad de seguimiento en función de las coordenadas esféricas, los movimientos de inclinación, oscilación y balanceo y la distancia.
Preferentemente, el sistema incluye además un dispositivo de salida que envía la información de posición relativa al
blanco. Preferentemente, el movimiento de balanceo se basa en al menos una de una comparación entre un componente de polarización horizontal de la luz láser y un componente de polarización vertical de la luz láser. Preferentemente, el sistema incluye además un primer fotodetector que detecta el componente de polarización horizontal de la luz láser y un segundo fotodetector que detecta el componente de polarización vertical de la luz 5 láser. Preferentemente, el sistema incluye además un circuito de determinación de balanceo que recibe una salida del primer fotodetector y una salida del segundo fotodetector. En una forma de realización alternativa, el sistema usa un nivel electrónico para medir los movimientos de balanceo del blanco.
Preferentemente, el blanco es un blanco activo que es capaz de moverse respecto a la unidad de seguimiento. 1 Preferentemente, el blanco es al menos uno de incorporado en una unidad remota, acoplado de manera fija a un objeto, usado para control de realimentación, usado para calibrado, usado para control de máquinas herramienta, usado para ensamblaje de piezas, usado para ensamblaje estructural y usado para inspección dimensional. Preferentemente, la unidad remota es un robot. Preferentemente, el robot incluye un sistema de accionamiento y uno o más dispositivos de tracción que permiten que el robot se adhiera a una superficie. Preferentemente, los 15 dispositivos de tracción son dispositivos de tipo ventosa. Alternativamente, se puede usar un sistema de presión positiva de aire para mantener la unidad remota acoplada a la superficie de manera que se pueda mover. Preferentemente, el sistema incluye además un sistema de vacío. Preferentemente, el sistema incluye además uno o más accesorios que permiten llevar a cabo una función al menos en función de la información de posición del blanco.
Además, la invención proporciona una unidad remota asociada a un sistema de medición multidimensional. La unidad remota incluye un ensamblaje de blanco y sonda acoplado al blanco. El blanco está en comunicación con una unidad de seguimiento del sistema de medición multidimensional. El blanco es capaz de hacer movimientos de inclinación, oscilación y balanceo. El ensamblaje de sonda incluye una punta de sonda, una varilla de sonda y una 25 base de sonda. La punta de sonda está configurada para llegar a ubicaciones que no están en una línea de visibilidad entre la unidad de seguimiento y el blanco.
Preferentemente, la unidad remota Incluye además uno o más codificadores acoplados al ensamblaje de sonda. Preferentemente, al menos uno de los codificadores está configurado para determinar una primera posición angular 3 de la punta de sonda respecto a la base de sonda. Preferentemente, al menos uno de los codificadores está configurado para determinar una segunda posición angular de la punta de sonda respecto a la base de sonda. Preferentemente, al menos uno de los codificadores está configurado para determinar una posición axial de la punta de sonda respecto a la base de sonda.
Preferentemente, la unidad remota incluye además un activador configurado para efectuar una o más mediciones asociadas a una ubicación que toca la punta de sonda. Alternativamente, la unidad remota puede incluir un sensor de contacto asociado a la punta de sonda. Cuando el sensor de contacto entra en contacto con la ubicación se toman una o más mediciones asociadas a una ubicación.
En otro aspecto, la invención se refiere a un blanco asociado a un sistema de medición multidimensional. El blanco Incluye un retrorreflector y un sensor de luz láser. El retrorreflector tiene un ápice. El ápice está configurado para permitir que al menos parte de una luz de haz láser entre en el retrorreflector para salir del retrorreflector. El sensor de luz láser está configurado para detectar al menos la parte de la luz de haz láser que sale del retrorreflector a través del ápice. Preferentemente, el blanco está configurado para estar acoplado a un sensor de medición óptica. 45
Preferentemente, el retrorreflector es un retrorreflector hueco. El retrorreflector incluye una abertura en el ápice. La abertura está configurada para permitir que al menos la parte de la luz de haz láser salga del retrorreflector. Preferentemente, el retrorreflector incluye tres espejos que forman el ápice.
Alternativamente, el retrorreflector puede... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de medición multidimensional que comprende:
una unidad de seguimiento (1) que emite luz láser (11, 21, 31, 141) y lleva a cabo un seguimiento usando coordenadas esféricas;
un blanco (15, 145) en comunicación con la unidad de seguimiento (1), siendo el blanco (15, 145) capaz de hacer movimientos de inclinación, oscilación y balanceo;
un módulo de determinación de distancia que determina una distancia entre la unidad de seguimiento (1) y el blanco (15, 145);
un módulo de salida (2) que envía información de posición relativa al blanco (15, 145) respecto a la unidad de 15 seguimiento (1) en función de las coordenadas esféricas, los movimientos de inclinación, oscilación y balanceo y la distancia y
una unidad remota (7, 8, 12) está asociada al sistema de medición multidimensional, comprendiendo la unidad remota el blanco (15, 145) y un ensamblaje de sonda (6, 11, 121) acoplado al blanco (15, 145), el 2 ensamblaje de sonda (6, 11, 121) comprende una punta de sonda (62, 126), una varilla de sonda (61) y una base de sonda (73), en el que la punta de sonda (62, 126) está configurada para llegar a ubicaciones que no están en una linea de visibilidad entre la unidad de seguimiento (1) y el blanco (15, 145),
caracterizado porque la determinación del movimiento de balanceo se basa en al menos una de una comparación 25 entre un componente de polarización horizontal (214) de la luz láser (21, 31) y un componente de polarización vertical (213) de la luz láser (21, 31).
2. El sistema de la reivindicación 1, que comprende además un primer fotodetector (24) que detecta el
componente de polarización horizontal (214) de la luz láser (21, 31) y un segundo fotodetector (23) que detecta
el componente de polarización vertical (213) de la luz láser (21, 31).
3. El sistema de la reivindicación 2, que comprende además un circuito de determinación de balanceo (25) que recibe una salida del primer fotodetector (24) y una salida del segundo fotodetector (23).
4. El sistema de la reivindicación 1, que comprende un nivel electrónico configurado para medir
movimientos de balanceo asociados al blanco (15, 145).
5. El sistema de la reivindicación 1, en el que el blanco es un blanco activo que es capaz de moverse respecto a la unidad de seguimiento (7, 8, 12).
6. El sistema de la reivindicación 5, en el que el blanco es al menos uno de incorporado en la unidad remota (7, 8, 12), acoplado de manera fija a un objeto, usado para control de realimentación, usado para calibrado, usado para control de máquinas herramienta, usado para ensamblaje de piezas, usado para ensamblaje estructural y usado para inspección dimensional.
7. El sistema de la reivindicación 6, en el que la unidad remota (7, 8, 12) es un robot (4) que tiene un sistema de accionamiento (42) y uno o más dispositivos de tracción que permiten que el robot (4) se adhiera a una superficie.
8. El sistema de la reivindicación 6, que comprende además un sistema de vacío.
9. El sistema de la reivindicación 6, que comprende además uno o más accesorios que permiten llevar a
cabo una función al menos en función de la información de posición del blanco.
1. El sistema de la reivindicación 1, en el que la unidad remota (7, 8, 12) comprende además uno
o más codificadores (72, 74, 1) acoplados al ensamblaje de sonda (6, 11, 121).
11. El sistema de la reivindicación 1, en el que al menos uno de los codificadores (72) está configurado
para determinar una primera posición angular de la punta de sonda (62, 126) respecto a la base de sonda (73).
12. El sistema de la reivindicación 11, en el que al menos uno de los codificadores (74) está configurado
para determinar una segunda posición angular de la punta de sonda (62, 126) respecto a la base de sonda (73).
13. El sistema de la reivindicación 1, en el que al menos uno de los codificadores (1) está
configurado para determinar una posición axial de la punta de sonda (62, 126) respecto a la base de sonda (73).
14. El sistema de la reivindicación 1, en el que la unidad remota comprende además un activador (71) configurado para efectuar una o más mediciones asociadas a una ubicación que toca la punta de sonda (62, 126).
15. El sistema de la reivindicación 1, en el que la unidad remota comprende además un sensor de contacto asociado a la punta de sonda (62, 126), en el que, cuando el sensor de contacto entra en contacto con la ubicación, se toman una o más mediciones asociadas a una ubicación.
16. El sistema de la reivindicación 1, comprendiendo además el blanco (11, 21, 31, 141):
un retrorreflector (142, 16, 17) que tiene un ápice (1422, 162, 172), en el que el ápice (1422, 162, 171) está configurado para permitir que al menos parte de una luz de haz láser (141) entre en el retrorreflector (142, 16, 17) para salir del retrorreflector (142, 16) y
un sensor de luz láser (143) configurado para detectar al menos la parte de la luz de haz láser (141) que sale del retrorreflector (142, 16, 17) a través del ápice (1422, 162, 171).
17. El sistema de la reivindicación 16, en el que el blanco (15, 145) está configurado para estar 25 acoplado aun sensor de medición óptica (183).
18. El sistema de la reivindicación 16, en el que el retrorreflector es un retrorreflector hueco (16).
19. El sistema de la reivindicación 18, en el que el retrorreflector (16) comprende una abertura (161)
en el ápice (162), la abertura (161) está configurada para permitir que al menos la parte de la luz de haz láser
(141) salga del retrorreflector (16).
2. El sistema de la reivindicación 18, en el que el retrorreflector (16) comprende tres espejos que forman el ápice (162).
21. El sistema de la reivindicación 16, en el que el retrorreflector es un retrorreflector macizo (17).
22. El sistema de la reivindicación 21, en el que el ápice (171) comprende una pequeña superficie plana
(172) pulida para permitir que al menos la parte de la luz de haz láser (141) salga del retrorreflector (17).
23. El sistema de la reivindicación 16, en el que el sensor de luz láser (143) es un fotodetector.
24. El sistema de la reivindicación 16, en el que el sensor de luz láser (143) es un sensor matricial de dispositivos acoplados por carga.
25. El sistema de la reivindicación 16, en el que el sensor de luz láser (143) es capaz de funcionar para detectar al menos uno de los movimientos de inclinación y oscilación del blanco.
26. El sistema de la reivindicación 1, en el que la varilla de sonda (61) está configurada para plvotar 5 alrededor de la base de sonda (73) en círculo.
27. El sistema de la reivindicación 1, en el que la varilla de sonda (61) está configurada para plvotar en tres dimensiones alrededor de la base de sonda (73).
28. El sistema de la reivindicación 1, en el que la varilla de sonda (61) está configurada para moverse
alrededor de dos ejes.
29. El sistema de la reivindicación 1, en el que la varilla de sonda (61) está configurada en forma de "L".
3. El sistema de la reivindicación 1, en el que la varilla de sonda (61) está configurada para desplegarse, de manera que una longitud de la varilla de sonda (61) es variable.
31. Un procedimiento para medir una posición de un objeto con un sistema de medición multidimensional 5 que comprende:
controlar coordenadas esféricas de una unidad de seguimiento que emite luz láser (1);
controlar movimientos de inclinación, oscilación y balanceo de un blanco (15, 145) en comunicación con la unidad 1 de seguimiento (1);
determinar una distancia entre la unidad de seguimiento (1) y el blanco (15, 145);
enviar información de posición relativa al blanco (15, 145) respecto a la unidad de seguimiento (1) en función de 15 las coordenadas esféricas, los movimientos de inclinación, oscilación y balanceo y de la distancia y
estando una unidad remota (7, 8, 12) asociada al sistema de medición multidimensional, comprendiendo la unidad remota (7, 8, 12) el blanco (15, 145) y un ensamblaje de sonda (6, 11, 121) acoplado al blanco (15, 145), el ensamblaje de sonda (6, 11, 121) comprende una punta de sonda (62, 126), una 2 varilla de sonda (61) y una base de sonda (73), en el que la punta de sonda (62, 126) está configurada para llegar a ubicaciones del objeto que no están en una línea de visibilidad entre la unidad de seguimiento y el blanco
caracterizado porque controlar el movimiento de balanceo se basa en al menos una de una comparación entre un componente de polarización horizontal (214) de una luz láser (21, 31) que emite la unidad de seguimiento (1) y 25 un componente de polarización vertical (213) de la luz láser (21, 31).
32. El procedimiento de la reivindicación 31, en el que un circuito de determinación de balanceo (25) lleva a cabo la comparación entre el componente de polarización horizontal (214) de la luz láser (21, 31) y el componente de polarización vertical (213) de la luz láser (21, 31).
33. El procedimiento de la reivindicación 31, en el que el blanco (15, 145) es un blanco activo que es capaz de moverse respecto a la unidad de seguimiento (1).
34. El procedimiento de la reivindicación 31, en el que el blanco (15, 145) es al menos uno de 35 incorporado en una unidad remota (7, 8, 12), acoplado de manera fija a un objeto, usado para control de
realimentación, usado para calibrado, usado para control de máquinas herramienta, usado para ensamblaje de piezas, usado para ensamblaje estructural y usado para inspección dimensional.
35. El procedimiento de la reivindicación 34, en el que la unidad remota (7, 8, 12 comprende un 4 sistema de accionamiento (42) y uno o más dispositivos de tracción que permiten que la unidad remota (7, 8,
12) se adhiera a una superficie.
36. El procedimiento de la reivindicación 35, en el que los dispositivos de tracción son dispositivos de tipo ventosa (41) que se usan conjuntamente con un sistema de vacio.
37. El procedimiento de la reivindicación 34, en el que la unidad remota (7, 8, 12) se controla a distancia.
38. El procedimiento de la reivindicación 34, que comprende además permitir que un accesorio lleve a 5 cabo una función al menos en función de la información de posición del blanco (15, 145).
39. El procedimiento de la reivindicación 31, caracterizado además por tener el ensamblaje de sonda (6, 11, 12) una punta de sonda (62, 126), una varilla de sonda (61) y una base de sonda (73), en el que la punta de sonda (62, 126) está configurada para llegar a ubicaciones en el objeto que no están en una línea de
visibilidad entre la unidad de seguimiento (1) y el blanco (15, 145) y en el que uno o más codificadores (72, 74, 1) acoplados al ensamblaje de sonda (6, 11, 12).
4. El procedimiento de la reivindicación 41, en el que al menos un codificador (74) está configurado para determinar una primera posición angular de la punta de sonda (62, 126) respecto a la base de sonda (73),
al menos un codificador (74) está configurado para determinar una segunda posición angular de la punta de sonda (62, 126) respecto a la base de sonda (73) y/o
al menos un codificador (1) está configurado para determinar una posición axial de la punta de sonda (62, 126) respecto a la base de sonda (73).
41. El procedimiento de la reivindicación 39, en el que un activador de la unidad remota (7, 8, 1) se activa para efectuar una o más mediciones asociadas a una ubicación en el objeto que toca la punta de sonda
(62, 126).
42. El procedimiento de la reivindicación 39, caracterizado además por un sensor de contacto asociado a la punta de sonda (62, 126), en el que, cuando el sensor de contacto entra en contacto con el objeto, se toman una o más mediciones asociadas a la ubicación en el objeto.
Patentes similares o relacionadas:
 Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Sistema de detección de localización de fuente de luz, del 6 de Mayo de 2020, de Thales Defense & Security, Inc: Un sistema para rastrear una orientación de un primer objeto , comprendiendo el sistema: un dispositivo de emisión de luz situado con respecto […]
Procedimiento y dispositivo para determinar la distancia entre un receptor aéreo y un emisor terrestre fijo, del 19 de Junio de 2019, de MBDA FRANCE: Procedimiento para la determinación continua de la distancia entre un receptor aéreo (R) móvil de manera conocida en una trayectoria conocida (T) y un […]
SISTEMA INFO-OPTICO PARA LA MONITORIZACIÓN DEL MOVIMIENTO DE ROEDORES DE LABORATORIO, del 10 de Enero de 2019, de UNIVERSIDAD DE MURCIA: Sistema info-óptico para la monitorización del movimiento de roedores de laboratorio. La presente invención consiste en un sistema info-óptico diseñado […]
SISTEMA DE POSICIONAMIENTO, del 10 de Enero de 2019, de IBAÑEZ CRUZ, Javier: Especialmente concebido para espacios cubiertos de grandes dimensiones, está constituido a partir de una serie de módulos espaciales estáticos convenientemente […]
 Sistema de navegación de campo próximo, del 31 de Octubre de 2018, de Airbus Defence and Space GmbH: Sistema de navegación de campo próximo que comprende un primer objeto y un segundo objeto, navegando el primer objeto en relación con el segundo objeto,
[…]
Sistema de navegación de campo próximo, del 31 de Octubre de 2018, de Airbus Defence and Space GmbH: Sistema de navegación de campo próximo que comprende un primer objeto y un segundo objeto, navegando el primer objeto en relación con el segundo objeto,
[…]
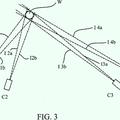 Medición óptica de hilo aéreo, del 27 de Septiembre de 2018, de JRB ENGINEERING PTY LTD: Método de medición óptica de una ubicación de uno o más objetos (W1-W6) que comprende:
obtener datos (22b) de imagen estereoscópica para el […]
Medición óptica de hilo aéreo, del 27 de Septiembre de 2018, de JRB ENGINEERING PTY LTD: Método de medición óptica de una ubicación de uno o más objetos (W1-W6) que comprende:
obtener datos (22b) de imagen estereoscópica para el […]
SISTEMA INTERIOR DE LOCALIZACION EN ENTORNOS METÁLICOS., del 27 de Junio de 2018, de SKYLIFE ENGINEERING, S.L: Sistema interior de localización en entornos metálicos basado en un sistema de posicionamiento destinado a entornos donde la recepción de señales […]