Inyector automático con función automática de autodirección de ariete.
Un inyector automático (10) que comprende:
un ariete (14);
lógica de identificación del tipo de jeringa (142); caracterizado por
una unidad de memoria,
donde dicha unidad de memoria comprende una tabla de búsqueda (190) que correlaciona cada uno de una pluralidad de tipos de jeringa con una de una pluralidad de posiciones de origen; y
lógica autodirección del ariete (144) operable para conducir dicho ariete (14) a una posición de origen correspondiente a un tipo de jeringa de acuerdo con la tabla de búsqueda tras la ocurrencia de una condición predeterminada.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2009/053071.
Solicitante: Mallinckrodt LLC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 675 MCDONNELL BOULEVARD HAZELWOOD, MO 63042 ESTADOS UNIDOS DE AMERICA.
Inventor/es: FAGO, FRANK, M., PERKINS,JEFFREY A, MCLEAN,MICHAEL W, POTTER,VICTOR L.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61M5/145 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61M DISPOSITIVOS PARA INTRODUCIR AGENTES EN EL CUERPO O PARA DEPOSITARLOS SOBRE EL MISMO (introducción de remedios en o sobre el cuerpo de animales A61D 7/00; medios para la inserción de tampones A61F 13/26; dispositivos para la administración vía oral de alimentos o medicinas A61J; recipientes para la recogida, almacenamiento o administración de sangre o de fluidos médicos A61J 1/05 ); DISPOSITIVOS PARA HACER CIRCULAR LOS AGENTES POR EL CUERPO O PARA SU EXTRACCION (cirugía A61B; aspectos químicos de los artículos quirúrgicos A61L; magnetoterapia utilizando elementos magnéticos colocados dentro del cuerpo A61N 2/10 ); DISPOSITIVOS PARA INDUCIR UN ESTADO DE SUEÑO O LETARGIA O PARA PONERLE FIN. › A61M 5/00 Dispositivos para introducir agentes en el cuerpo vía subcutánea, intravenosa o intramuscular; Accesorios correspondientes, p. ej. dispositivos de llenado o de limpieza, reposa-brazos (conectores o acoplamientos para tubos, válvulas o conjuntos de derivación, especialmente concebidos para uso médico A61M 39/00; recipientes especialmente adaptados para fines médicos o farmacéuticos A61J 1/00). › utilizando depósitos con presión, p. ej. por medio de pistones.
PDF original: ES-2528596_T3.pdf
Fragmento de la descripción:
Inyector automático con función automática de autodirección de ariete Campo de la invención
La presente invención se refiere en general a sistemas de inyección y, más particularmente, a sistemas y métodos de inyección relacionados con el movimiento automático de un ariete del inyector de un sistema de inyección a una posición de origen.
Antecedentes
Varios procedimientos médicos requieren que uno o más fluidos médicos se inyectan en el paciente. Los procedimientos médicos de formación de imágenes a menudo implican la inyección de medio de contraste en el paciente, posiblemente junto con fluidos salinos u otros. Otros procedimientos médicos implican la inyección de uno o más fluidos en un paciente con fines terapéuticos. Los inyectores automáticos pueden ser utilizados para estos tipos de aplicaciones.
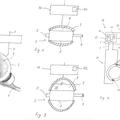
Un inyector automático generalmente incluye lo que se conoce comúnmente como un cabezal de potencia. Una o más jeringas pueden estar montadas en el cabezal de potencia de diversas maneras (por ejemplo, separable; de carga trasera; de carga delantera; carga lateral). Cada jeringa incluye típicamente lo que puede ser caracterizado como un émbolo, pistón de la jeringa o similares. Cada émbolo de la jeringa está diseñado para interferir con (por ejemplo, entrar en contacto con/o interconectarse temporalmente con) un accionador de jeringa apropiado que se incluye en el cabezal de potencia, de tal manera que el funcionamiento del accionador de jeringa hace avanzar axialmente el émbolo de la jeringa asociada dentro y en relación con el cilindro de la jeringa. Un accionador típico de la jeringa está en la forma de un ariete que está montado en un tornillo de avance o de accionamiento roscado. El giro del tornillo de accionamiento en una dirección de giro hace avanzar el ariete asociado en una dirección axial, mientras que el giro del tornillo de accionamiento en la dirección de giro opuesta hace avanzar el pistón asociado en la dirección axial opuesta.
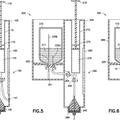
Las jeringas utilizadas por el inyector automático pueden estar pre-cargadas y/o el inyector automático puede ser usado para cargar las jeringas de uno o más recipientes de fluido (por ejemplo, recipientes que contienen una sola dosis de fluido médico o contenedores de fluidos a granel que contienen múltiples dosis de un fluido médico). Las jeringas precargadas pueden incluir émbolos situados distalmente con respecto a una boquilla de la jeringa de tal manera que el fluido puede estar contenido dentro de la jeringa. Cuando se utilizan recipientes de fluido, las jeringas pueden estar interconectadas al cabezal de potencia en una condición de vacío y cargarse, después, mediante la retracción del émbolo de la jeringa mientras que el recipiente de fluido está conectado de forma fluida a la jeringa. Por consiguiente, las jeringas utilizadas en estos sistemas pueden ser proporcionadas con émbolos completamente avanzados (por ejemplo, próximos a la boquilla de la jeringa), completamente retraídos, o en cualquier posición apropiada.
El documento US 26/79765 A1 desvela un inyector automático de acuerdo con el preámbulo de la reivindicación 1, y un método de mover un ariete del inyector a una posición de origen de acuerdo con el preámbulo de la reivindicación 19.
Sumario
Cualquier Inyector automático que puede ser utilizado para proporcionar una descarga de fluido puede ser de cualquier tamaño, forma, configuración, y/o tipo adecuado. Cualquiera de tales Inyectores automáticos puede utilizar uno o más accionadores del émbolo de la jeringa de cualquier tamaño, forma, configuración, y/o tipo adecuado, donde cada uno de tales accionadores del émbolo de la jeringa es capaz de al menos un movimiento bi-direccional (por ejemplo, un movimiento en una primera dirección para descargar fluido; un movimiento en una segunda dirección para dar cabida una carga y/o extracción de fluido o con el fin de volver a una posición para una operación de descarga de fluido posterior), y donde cada uno de tales accionadores del émbolo de la jeringa puede interactuar con su correspondiente émbolo de la jeringa de cualquier manera apropiada (por ejemplo, por contacto mecánico; por un acoplamiento adecuado (mecánico o de otro modo)) con el fin de ser capaz de hacer avanzar el émbolo de la jeringa en al menos una dirección (por ejemplo, para descargar el fluido).
Cualquiera de tales inyectores automáticos puede ser usado para cualquier aplicación adecuada en que se desea el suministro de uno o más fluidos médicos, Incluyendo, sin limitación, cualquier aplicación médica adecuada (por ejemplo, Imágenes por tomografía computarlzada o CT; imágenes por resonancia magnética o MRI, imágenes SPECT; Imágenes PET; imágenes de rayos X, imágenes angiográficas, imagen óptica, ecografía). Cualquiera de tales inyectores automáticos puede ser utilizado en conjunto con cualquier componente o combinación de componentes, tal como un sistema de formación de imágenes apropiado (por ejemplo, un escáner CT). Por ejemplo, la información puede ser transmitida entre cualquier inyector automático y uno o más de otros componentes (por ejemplo, información de retardo de la exploración, señal de inicio de inyección, velocidad de inyección).
Cualquier número adecuado de jeringas puede utilizarse con cualquiera de tales inyectores automáticos en cualquier forma apropiada (por ejemplo, separable; de carga delantera; de carga trasera; de carga lateral), cualquier fluido médico adecuado puede ser descargado mediante una jeringa dada de tal inyector automático (por ejemplo, medios de contraste, radiofármacos, solución salina, y cualquier combinación de los mismos), así como cualquier líquido adecuado puede ser descargado desde una configuración de inyector automático con múltiples jeringas determinada de cualquier modo apropiado (por ejemplo, secuencialmente, simultáneamente), o cualquier combinación de los mismos. En una realización, el fluido descargado desde una jeringa por la operación del inyector automático se dirige dentro de un conducto, donde este conducto está fluidamente interconectado con la jeringa de cualquier forma apropiada y dirige el fluido a una ubicación deseada (por ejemplo, a un catéter que se inserta en un paciente, por ejemplo para inyección). Múltiples jeringas pueden descargarse en un conducto común (por ejemplo, para la provisión en un sitio de inyección individual), o una jeringa puede verterse en un conducto (por ejemplo, para la provisión en un sitio de inyección), mientras que otra jeringa puede descargar en un conducto diferente (por ejemplo, para el suministro a un sitio de inyección diferente). En una realización, cada jeringa incluye un cuerpo de jeringa y un émbolo que está dispuesto dentro y que es móvil con respecto al cuerpo de la jeringa. Este émbolo puede estar en la interfaz con el conjunto de accionamiento del embolo de la jeringa del inyector automático de tal manera que el conjunto de accionamiento del émbolo de la jeringa es capaz de hacer avanzar el émbolo en al menos una dirección, y posiblemente en dos direcciones opuestas, diferentes.
Las jeringas que se utilizan en los inyectores de potencia descritas en este documento pueden ser suministradas con émbolos y pueden estar dispuestas en diversas posiciones en relación con el cilindro de la jeringa. Por ejemplo, las jeringas pueden suministrarse pre-cargadas con un fluido médico. En tal caso, el émbolo puede estar dispuesto en una posición relativamente retraída (por ejemplo, con el émbolo distal a una boquilla de la jeringa) para alojar el fluido dentro del cilindro de la jeringa. En otro ejemplo, las jeringas se pueden suministrar en un estado de vacío para ser cargadas antes de su uso. En tal caso, el émbolo puede estar dispuesto en cualquier posición apropiada. Por ejemplo, una jeringa vacía se puede suministrar con el pistón en una posición relativamente avanzada o extendida (por ejemplo, con el émbolo próximo a una boquilla de la jeringa). En otro ejemplo, una jeringa vacía se puede suministrar con el pistón en una posición relativamente retraída. Los aspectos descritos en este documento pueden ser operables para determinar una posición de origen y/o mover el ariete a la posición de origen para el tipo de jeringa que se va a utilizar en una secuencia de inyección en un paciente.
La presente invención se representa en un inyector automático de acuerdo con la reivindicación 1, que comprende un ariete, lógica de identificación del tipo jeringa, una unidad de memoria, y la lógica de autodirección del ariete. La unidad de memoria comprende una tabla de consulta que se correlaciona cada una de una pluralidad de tipos de jeringa con una de una pluralidad de posiciones de origen. Como tal,... [Seguir leyendo]
Reivindicaciones:
1. Un inyector automático (1) que comprende:
un ariete (14);
lógica de identificación del tipo de jeringa (142); caracterizado por
una unidad de memoria, donde dicha unidad de memoria comprende una tabla de búsqueda (19) que correlaciona cada uno de una pluralidad de tipos de jeringa con una de una pluralidad de posiciones de origen; y lógica autodirección del ariete (144) operable para conducir dicho ariete (14) a una posición de origen correspondiente a un tipo de jeringa de acuerdo con la tabla de búsqueda tras la ocurrencia de una condición
predeterminada.
2. El inyector automático de la reivindicación 1, que incluye además una jeringa (28) en dicho inyector (1), donde dicha condición predeterminada comprende la retirada de dicha jeringa de dicho inyector.
3. El inyector automático de la reivindicación 1, que incluye además una jeringa (28) en dicho inyector (1), donde dicha condición predeterminada comprende desacoplar dicha jeringa de dicho inyector.
4. El inyector automático de la reivindicación 1, donde dicha condición predeterminada comprende la realización de una secuencia de inyección.
5. El inyector automático de la reivindicación 1, donde dicha condición predeterminada comprende desconectar de forma fluida un paciente de dicho inyector (1).
6. El inyector automático de la reivindicación 1, que comprende además un pestillo de jeringa (16).
7. El inyector automático de la reivindicación 6, que comprende además un sensor (194) dispuesto para indicar si dicho pestillo de jeringa (16) está acoplado.
8. El inyector automático de una cualquiera de las reivindicaciones 1 a 7, que comprende además un sensor de jeringa.
9. El inyector automático de la reivindicación 8, donde dicho sensor de jeringa comprende un sensor óptico.
1. El inyector automático de la reivindicación 8 o la reivindicación 9, donde dicho sensor de jeringa comprende un lector de RFID.
11. El inyector automático de una cualquiera de las reivindicaciones 1-1, que comprende además un codificador de posición del ariete.
12. El inyector automático de una cualquiera de las reivindicaciones 1-11, que comprende además una placa frontal (12), donde dicha placa frontal comprende un miembro de montaje de la jeringa.
13. El inyector automático de la reivindicación 12, donde dicha placa frontal (12) está configurada para un primer tipo de jeringa y donde dicho tipo de placa frontal se comunica a dicho inyector automático (1).
14. El inyector automático de una cualquiera de las reivindicaciones 1-11, que comprende además:
un miembro de montaje (82) de placa frontal, y una placa frontal (12), donde dicha placa frontal comprende un miembro de montaje de la jeringa, donde dicho inyector automático es operable para determinar un tipo de placa frontal de dicha placa frontal cuando dicha placa frontal está interconectada a dicho miembro de montaje de
placa frontal.
15. El inyector automático de cualquiera de las reivindicaciones 12-14, que comprende además un sensor de placa
frontal.
16. El inyector automático de la reivindicación 15, donde dicho sensor de placa frontal es operable para detectar la presencia de una placa frontal (12) instalada en dicho inyector.
17. El inyector automático de la reivindicación 15 o la reivindicación 16, donde dicho sensor de placa frontal es operable para detectar un tipo de placa frontal de una placa frontal instalada (12) en dicho inyector.
18. El inyector automático de una cualquiera de las reivindicaciones 15-17, donde dicho sensor de placa frontal es operable para distinguir un tipo de placa frontal en base a la detección de al menos un imán de dicha placa frontal
(12).
19. Un método para mover un ariete del inyector de un inyector automático a una posición de origen, comprendiendo dicho método:
identificar, por dicho inyector automático, un tipo jeringa montado en dicho inyector automático; caracterizado por
obtener por dicho inyector automático, una posición de origen para dicho tipo de jeringa identificado en dicha etapa de identificación, siendo dicha posición de origen identificada a partir de una tabla de búsqueda almacenada en una memoria; detectar un evento; y
mover automáticamente el ariete del inyector a la posición de origen obtenida en respuesta a dicha etapa de detección.
2. El método de la reivindicación 19, donde dicho evento comprende desacoplar una placa frontal de dicho inyector automático.
21. El método de la reivindicación 19 o la reivindicación 2, donde dicho evento comprende realizar una secuencia de inyección con dicho inyector automático.
22. El método de una cualquiera de las reivindicaciones 19-21, donde dicho evento comprende recibir una entrada de usuario.
23. El método de una cualquiera de las reivindicaciones 19-22, donde dicho evento comprende la detección, por dicho inyector automático, de la retirada de una jeringa desde de dicho inyector automático.
24. El método de una cualquiera de las reivindicaciones 19-23, donde dicha etapa de identificación comprende la determinación de un tipo de placa frontal de una placa frontal interconectada a un miembro de montaje de la placa frontal de dicho inyector automático, donde dicho tipo de placa frontal corresponde a dicho tipo de jeringa.
25. El método de la reivindicación 24, donde dicha determinación comprende la detección de al menos un atributo de dicha placa frontal.
26. El método de la reivindicación 24 o la reivindicación 25, donde dicha determinación comprende la detección de al menos un imán de dicha placa frontal.
27. El método de una cualquiera de las reivindicaciones 19-26, que comprende además la abertura de una placa frontal.
28. El método de una cualquiera de las reivindicaciones 19-27, que comprende además:
retirar una jeringa utilizada de dicho inyector automático después de dicha etapa de movimiento; e instalar una nueva jeringa después de dicha etapa de retirada.
29. El método de una cualquiera de las reivindicaciones 19-28, que comprende además: presentar un botón de inicio a un usuario; y
detectar una presión de dicho botón de inicio para iniciar dicha etapa de movimiento.
3. El método de una cualquiera de las reivindicaciones 19-29, que comprende además inyectar fluido desde dicha jeringa a un paciente.
31. El método de una cualquiera de las reivindicaciones 19-3, que comprende además verificar que dicho paciente está desconectado de dicho inyector automático antes de dicha etapa de movimiento de forma automática.
Patentes similares o relacionadas:
Un dispositivo para realizar anestesia regional, del 3 de Junio de 2020, de The Queen Elizabeth Hospital King's Lynn NHS Foundation Trust: Un dispositivo de administración anestésica que comprende: a) una aguja anestésica regional; (b) un tubo de alimentación y un dispositivo de infusión en […]
 Mecanismo de inyección utilizando un vial, del 27 de Mayo de 2020, de BECTON, DICKINSON AND COMPANY: Un sistema de administración para dispensar un medicamento que comprende:
una carcasa ;
una primera cámara para […]
Mecanismo de inyección utilizando un vial, del 27 de Mayo de 2020, de BECTON, DICKINSON AND COMPANY: Un sistema de administración para dispensar un medicamento que comprende:
una carcasa ;
una primera cámara para […]
Motor de bomba con sistema de medición para administrar un medicamento líquido, del 20 de Mayo de 2020, de BECTON, DICKINSON AND COMPANY: Un sistema de bomba de infusión para administrar medicación líquida, que comprende: un primer reservorio para almacenar medicación […]
Mecanismo de inserción de cartucho para un dispositivo de suministro de fluido, del 6 de Mayo de 2020, de ZEALAND PHARMA A/S: Un dispositivo de suministro de fluido que comprende: una unidad de accionamiento que incluye un accionador y una o más primeras […]
 Dispositivo de bomba médica, del 29 de Abril de 2020, de B. BRAUN MELSUNGEN AG: Dispositivo de bomba médica para suministrar un fluido médico con un cuerpo de base y una membrana hueca elastomérica establecida en […]
Dispositivo de bomba médica, del 29 de Abril de 2020, de B. BRAUN MELSUNGEN AG: Dispositivo de bomba médica para suministrar un fluido médico con un cuerpo de base y una membrana hueca elastomérica establecida en […]
Dispositivo de infusión a modo de parche, del 15 de Abril de 2020, de BECTON, DICKINSON AND COMPANY: Un dispositivo para suministrar un medicamento en el cuerpo de un paciente mediante inyección en o a través de la piel de un paciente, que […]
Aplicador, del 18 de Marzo de 2020, de HISAMITSU PHARMACEUTICAL CO. INC.: Un aplicador para transferir un principio activo a un cuerpo a través de la piel mediante una punción en la piel con microagujas , comprendiendo […]
Procedimiento de control anti-bolo y dispositivo correspondiente, del 18 de Marzo de 2020, de FRESENIUS VIAL SAS: Procedimiento de control del desplazamiento del elemento de empuje de una bomba de tipo jeringa de empuje, comprendiendo la bomba una carcasa , una […]