Dispositivo y procedimiento de inserción de elementos en cajas de fusibles.
Dispositivo y procedimiento de inserción de elementos en cajas de fusibles.
La presente invención da a conocer un dispositivo y un procedimiento de inserción de elementos (20) que permite, de forma automática insertar elementos en cajas de fusibles (2) de manera que se produce una conexión. Dicho dispositivo comprende:
- una bandeja destinada a recibir cajas de fusibles (2);
- un actuador (1) que comprende medios de desplazamiento, al menos, dos ejes de coordenadas;
- un controlador del actuador
- al menos una herramienta unida al actuador (1) mediante medios de unión desmontables;
Adicionalmente, dicho actuador (1) comprende medios de medición de la fuerza ejercida por el actuador (1) en al menos una de las coordenadas lo que permite controlar que se ha realizado una inserción adecuada.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201430625.
Solicitante: EMDEP-2, S.L.
Nacionalidad solicitante: España.
Inventor/es: AMORES SERRANO,JULIAN, MARTINEZ ZAMBRANA,JUAN ANTONIO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H01H85/36 ELECTRICIDAD. › H01 ELEMENTOS ELECTRICOS BASICOS. › H01H INTERRUPTORES ELECTRICOS; RELES; SELECTORES; DISPOSITIVOS DE PROTECCION DE EMERGENCIA (cables de contacto H01B 7/10; interruptores automáticos de tipo electrolítico H01G 9/18; circuitos de protección, de seguridad H02H; conmutación por medios electrónicos sin cierre de contactos H03K 17/00). › H01H 85/00 Dispositivos de protección en los cuales la corriente circula a través de un órgano de material fusible y es interrumpida por desplazamiento de este material fusible cuando se vuelve excesiva (interruptores accionados por la fusión de un material fusible H01H 37/76; disposición o instalación de cortacircuitos en los cuadros de conmutación H02B 1/18). › Medios para aplicar una tensión mecánica al elemento fusible.
Fragmento de la descripción:
P201430625
DISPOSITIVO Y PROCEDIMIENTO DE INSERCIÓN DE ELEMENTOS EN CAJAS DE FUSIBLES
D E S C R I P C I Ó N
OBJETO DE LA INVENCIÓN
La presente invención da a conocer un dispositivo para la inserción de elementos dispuestos en una caja de fusibles. En particular, la presente invención pretende la inserción de los diferentes elementos que forman parte de las cajas de fusibles, en particular, en el sector de la automoción.
ANTECEDENTES DE LA INVENCIÓN
En los dispositivos conocidos, la inserción de los fusibles en las cajas, puede realizarse automática o manual pero, en cualquiera de los dos casos, se pueden producir errores en la inserción de los componentes que afectarían el funcionamiento de las mismas. Generalmente, los componentes eléctricos de una caja de fusibles, comprenden al menos un par de patillas metálicas que se insertan en las correspondientes ranuras electrificadas, de modo que dicha conexión sirve de sujeción mecánica del componente a la caja, a la vez que permite la continuidad eléctrica para el correcto funcionamiento del componente electrónico/eléctrico (fusibles, relés, entre otros) . De la correcta inserción de dichos componentes, depende el correcto funcionamiento de la caja de fusibles, por ejemplo, en el sistema eléctrico de un vehículo.
En la inserción de los componentes, pueden producirse errores tales como, que el componente no se ha insertado en su totalidad, que el componente se ha insertado de lado, que las patillas metálicas del componente no se han insertado entre las pistas metálicas de la ranura sino lateralmente por una de ellas, o que no se han insertado los componentes en la posición establecida, o que los componentes no son los correctos para esa posición.
Los dispositivos de la técnica anterior disponen de módulos neumáticos cuya función es P201430625
presionar los elementos dispuestos en las cajas de fusibles, estos dispositivos carecen de precisión y no es posible controlar la fuerza que se ha realizado mediante ellos por lo cual es difícil determinar si se ha producido un fallo en la inserción de un elemento en la caja de fusibles.
DESCRIPCIÓN DE LA INVENCIÓN
Con el fin de solucionar los problemas que presentan los dispositivos de la técnica anterior, la presente invención da a conocer un dispositivo de inserción de elementos en cajas de fusibles que incorpora la ventaja de tener capacidad de diagnóstico de la inserción de los elementos.
En concreto, la presente invención da a conocer un dispositivo de inserción de elementos en cajas de fusibles que comprende:
una bandeja destinada a recibir cajas de fusibles;
un actuador que comprende medios de desplazamiento, al menos, dos ejes de coordenadas;
un controlador del actuador
al menos una herramienta unida al actuador mediante medios de unión
desmontables; En el que el actuador comprende medios de medición de la fuerza ejercida por el actuador en al menos una de las coordenadas.
Preferentemente, los medios de desplazamiento comprenden al menos un motor eléctrico. Dicho motor eléctrico puede ser para un motor eléctrico para cada una de las coordenadas.
En el caso de disponer de dichos motores eléctricos, la medición de la fuerza ejercida por el actuador puede realizarse mediante un sensor de la energía requerida para mover el motor. En concreto el sensor puede ser un sensor de corriente.
Un ejemplo de realización preferente de la presente invención, comprende un elemento de calibración de los medios de medición de la fuerza ejercida por el actuador. Dicho elemento de calibración puede ser un transductor de fuerza como, por ejemplo, una célula de carga.
P201430625
Para complementar la calibración, se puede realizar una calibración también de la posición del actuador. Dicho elemento de calibración de la posición puede ser, por ejemplo, finales de carrera para las coordenadas correspondientes al plano paralelo al plano de la caja de fusibles (es decir, las coordenadas X e Y de un eje cartesiano) y la coordenada restante (es decir, la coordenada Z de un eje cartesiano) puede medirse mediante un final de carrera o cualquier otro medio de detección de presencia.
Preferentemente, el elemento de calibración de la posición del actuador y el elemento de calibración de los medios de medición de la fuerza ejercida por el actuador se encuentran dispuestos sustancialmente en la misma ubicación.
Adicionalmente, el dispositivo de la presente invención comprende más de una herramienta para actuación sobre los fusibles. Dicha herramienta tendrá dimensiones diferentes dependiendo del fusible o elemento que se quiera disponer en la caja.
Por otra parte, para la sujeción de las herramientas al elemento actuador, el dispositivo puede comprender al menos un elemento de sujeción de herramientas.
En una realización particular de la presente invención, los medios de unión desmontables entre la herramienta y el actuador son medios neumáticos y/o electromecánicos.
Más preferentemente, el controlador del actuador comprende una base de datos en la que se almacena, como mínimo, un valor representativo de la fuerza máxima que se debe aplicar a al menos uno de los elementos a insertar en la caja de fusibles. En esta base de datos del controlador del actuador se pueden almacenar, entre otros, valores representativos de la fuerza mínima a realizar a al menos uno de los elementos a insertar en la caja de fusibles, valores representativos de la coordenada en la que se encuentra al menos uno de los elementos a insertar en la caja de fusibles, etc. Estos valores pueden ser valores predeterminados o pueden ser valores configurables por el usuario para cada una de las cajas de fusibles.
De igual manera, la presente invención también da a conocer un procedimiento para la P201430625
inserción de elementos en una caja de fusibles mediante un dispositivo que comprende
una bandeja destinada a recibir cajas de fusibles;
un actuador que comprende medios de desplazamiento, al menos, dos ejes de coordenadas;
un controlador del actuador
al menos una herramienta unida al actuador mediante medios de unión desmontables;
un calibrador; en el que el actuador comprende medios de medición de la fuerza ejercida por el actuador en al menos una de las coordenadas caracterizado porque comprende las etapas de:
a) unión de al menos una de las herramientas al actuador;
b) calibración de la posición de la herramienta haciendo que la herramienta entre en contacto con el calibrador;
c) mover el actuador hasta un punto sobre el elemento a insertar d) desplazar el actuador de manera que se presiona el elemento y, simultáneamente, realizar mediciones de fuerza y de posición del actuador.
Preferentemente, en la etapa c) el actuador se mueve hacia un punto en un plano sustancialmente paralelo al plano de la caja.
Más preferentemente la etapa d) se realiza moviendo el actuador en una dirección sustancialmente normal respecto al plano definido por la caja de fusibles.
En una realización particular, la etapa b) se realiza llevando el actuador a una coordenada de medición en la que se dispone al menos un sensor de posición. Adicionalmente, la etapa b) se puede realizar llevando el actuador a una coordenada de calibración en la que se dispone al menos un sensor de fuerza pudiendo estar dicho sensor de fuerza y al menos uno de los sensores de posición dispuestos sustancialmente en la misma coordenada o hacer parte de un mismo calibrador.
Dicha medición de fuerza se realiza, preferentemente, midiendo la energía eléctrica consumida por el motor para mover el actuador.
P201430625
Para complementar el análisis, se puede verificar que cada uno de los elementos dispuestos en la caja de fusibles es el adecuado mediante un sistema de visión artificial que comprende una cámara y medios digitales de tratamiento de imágenes.
DESCRIPCIÓN DE LOS DIBUJOS
Éstas y otras características y ventajas de la invención, se pondrán más claramente de manifiesto a partir de la descripción detallada que sigue de las formas preferidas de realización, dadas únicamente a título de ejemplo ilustrativo y no limitativo, con referencia a las figuras que se acompañan.
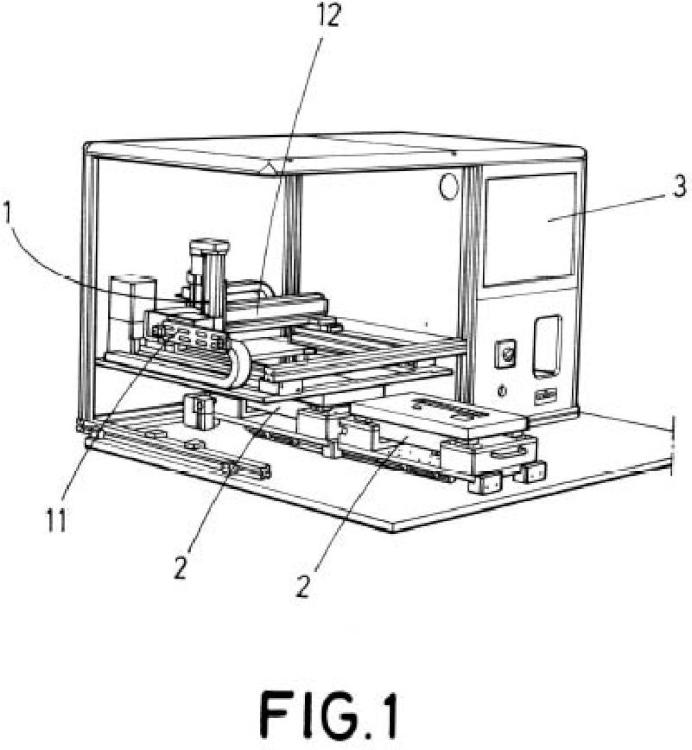
La figura 1 muestra una vista en perspectiva de un dispositivo según la presente invención.
La figura 2 muestra una vista en perspectiva de un ejemplo de actuador del dispositivo de la figura 1.
La figura 3 muestra el procedimiento de inserción mediante un actuador de un dispositivo según la presente invención.
La figura 4 muestra una vista en detalle de un ejemplo...
Reivindicaciones:
1. Dispositivo de inserción de elementos (20) en cajas de fusibles (2) que comprende: una bandeja destinada a recibir cajas de fusibles (2) ; un actuador (1) que comprende medios de desplazamiento, al menos, dos ejes de coordenadas;
un controlador del actuador al menos una herramienta unida al actuador (1) mediante medios de unión desmontables; caracterizado porque el actuador (1) comprende medios de medición de la fuerza ejercida por el actuador (1) en al menos una de las coordenadas.
2. Dispositivo, según la reivindicación 1, caracterizado porque los medios de desplazamiento comprenden al menos un motor eléctrico.
3. Dispositivo, según la reivindicación 2, caracterizado porque los medios de desplazamiento comprenden un motor eléctrico para cada una de las coordenadas.
4. Dispositivo, según la reivindicación 2, caracterizado porque los medios de medición de la fuerza ejercida por el actuador (1) comprenden un sensor de la energía requerida para mover el motor.
5. Dispositivo, según la reivindicación 1, caracterizado porque comprende un calibrador (16) de los medios de medición de la fuerza ejercida por el actuador (1) .
6. Dispositivo, según la reivindicación 5, caracterizado porque el calibrador (16) de los medios de medición de la fuerza ejercida por el actuador (1) es un transductor de fuerza.
7. Dispositivo, según la reivindicación 6, caracterizado porque dicho calibrador (16) de los medios de medición de la fuerza ejercida por el actuador (1) es una célula de carga.
8. Dispositivo, según la reivindicación 1, caracterizado porque comprende un calibrador (16) de la posición del actuador.
9. Dispositivo, según las reivindicaciones 5 y 8 caracterizado porque el calibrador de la posición del actuador (1) y el calibrador de los medios de medición de la fuerza ejercida por el actuador (1) se encuentran dispuestos sustancialmente en la misma ubicación.
10. Dispositivo, según la reivindicación 1, caracterizado porque comprende más de una herramienta.
11. Dispositivo, según la reivindicación 10, caracterizado porque comprende al menos un elemento de sujeción (15) de herramientas.
12. Dispositivo, según la reivindicación 1, caracterizado porque los medios de unión desmontables entre la herramienta y el actuador (1) son medios neumáticos.
13. Dispositivo según la reivindicación 1, caracterizado porque los medios de unión desmontables entre la herramienta y el actuador (1) son medios electromecánicos.
14. Dispositivo, según la reivindicación 1, caracterizado porque el controlador del actuador (1) comprende una base de datos que contiene, como mínimo, la fuerza máxima que se debe aplicar a al menos uno de los elementos (20) a insertar en la caja de fusibles (2) .
15. Dispositivo, según la reivindicación 14, caracterizado porque la base de datos del controlador del actuador (1) contiene un valor representativo de la fuerza mínima a realizar a al menos uno de los elementos (20) a insertar en la caja de fusibles (2) .
16. Dispositivo, según la reivindicación 14, caracterizado porque la base de datos del controlador del actuador (1) contiene un valor representativo de la coordenada en la que se encuentra al menos uno de los elementos (20) a insertar en la caja de fusibles (2) .
17. Dispositivo, según la reivindicación 1, caracterizado porque la herramienta comprende una pinza.
18. Procedimiento para la inserción de elementos (20) en una caja de fusibles (2) mediante un dispositivo que comprende una bandeja destinada a recibir cajas de fusibles;
un actuador (1) que comprende medios de desplazamiento, al menos, dos ejes de coordenadas;
un controlador del actuador al menos una herramienta unida al actuador (1) mediante medios de unión desmontables;
un calibrador (16) ; en el que el actuador comprende medios de medición de la fuerza ejercida por el actuador en al menos una de las coordenadas caracterizado porque comprende las etapas de:
a) unión de al menos una de las herramientas al actuador (1) ;
b) calibración de la posición de la herramienta haciendo que la herramienta entre en contacto con el calibrador (16) ;
c) mover el actuador (1) hasta un punto sobre el elemento a insertar d) desplazar el actuador (1) de manera que se presiona el elemento (20) y, simultáneamente, realizar mediciones de fuerza y de posición del actuador (1) .
19. Procedimiento, según la reivindicación 18, caracterizado porque en la etapa c) el actuador (1) se mueve hacia un punto en un plano sustancialmente paralelo al plano de la caja de fusibles (2) .
20. Procedimiento, según la reivindicación 19, caracterizado porque la etapa d) se realiza moviendo el actuador (1) en una dirección sustancialmente normal respecto al plano definido por la caja de fusibles (2) .
21. Procedimiento, según la reivindicación 18, caracterizado porque la etapa b) se realiza llevando el actuador (1) a una coordenada de calibración en la que se dispone al menos un sensor de posición.
22. Procedimiento, según la reivindicación 18, caracterizado porque la etapa b) se
realiza llevando el actuador (1) a una coordenada de calibración en la que se dispone al menos un sensor de fuerza.
23. Procedimiento según las reivindicaciones 21 y 22 caracterizado porque el sensor de fuerza y al menos uno de los sensores de posición se disponen sustancialmente en la misma coordenada.
24. Procedimiento, según la reivindicación 18 caracterizado porque la medición de fuerza se realiza midiendo la energía eléctrica consumida por el motor para mover el 10 actuador (1) .
Patentes similares o relacionadas:
Dispositivo interruptor de desconexión por fusible de perfil bajo, del 9 de Octubre de 2019, de COOPER TECHNOLOGIES COMPANY: Un dispositivo interruptor de desconexión por fusible que comprende: una carcasa de interruptor no conductora que incluye una pluralidad de lados ortogonales […]
 Método para dimensionamiento de un dispositivo separador para un disipador de sobretensiones, del 30 de Marzo de 2016, de DEHN + SOHNE GMBH + CO. KG: Dispositivo separador para un disipador de sobretensiones, de modo que su movimiento de conmutación se lleve a cabo mediante una lengüeta […]
Método para dimensionamiento de un dispositivo separador para un disipador de sobretensiones, del 30 de Marzo de 2016, de DEHN + SOHNE GMBH + CO. KG: Dispositivo separador para un disipador de sobretensiones, de modo que su movimiento de conmutación se lleve a cabo mediante una lengüeta […]
PROTECCION CONTRA SOBRECARGA PARA MAQUINAS ELECTRICAS., del 1 de Abril de 2007, de ROBERT BOSCH GMBH: Protección contra sobrecarga para máquinas eléctricas, que comprende: una bobina de supresión de interferencias con dos elementos de conexión eléctrica, […]
FUSIBLE, EN PARTICULAR FUSIBLE DE ALTA POTENCIA., del 16 de Octubre de 2005, de FRITZ DRIESCHER KG, SPEZIALFABRIK FUR ELEKTRIZITATSWERKSBEDARF GMBH & CO.: Fusible, en particular fusible de alta potencia, con al menos un conductor fusible, medios para la partición mecánica del conductor fusible, así como medios para […]
FUSIBLE DE ALTA TENSION Y ALTA POTENCIA., del 16 de Julio de 1999, de FRITZ DRIESCHER KG, SPEZIALFABRIK FUR ELEKTRIZITATSWERKSBEDARF GMBH & CO.: PARA CONSEGUIR UNA SEGURIDAD DE ZONA COMPLETA, EN DONDE SE CONSIGA LA SITUACION DE LA INTERRUPCION DE CADA CORRIENTE DE FORMA SEGURA Y COMPROBABLE, Y AL MISMO TIEMPO […]