INDICADOR DE POSICIÓN DE PLUMA PARA GRÚA.
Indicador de la posición en el espacio, es decir de la orientación de la pluma de una grúa,
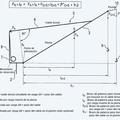
especialmente de una grúa de torre o de una grúa de pluma basculante, estando el indicador (7) asociado a un mecanismo de rotación de la grúa y comprendiendo un captador angular (8) accionado en rotación mediante un piñón (10) teniendo unos dientes (11) en número determinado (d), dicho piñón (10) engrana con una corona dentada (4) que tiene unos dientes (6) en número determinado (D) y perteneciendo al mecanismo de rotación de la grúa, de tal manera que la rotación del captador angular (8) sea representativa de la rotación de la pluma de la grúa, comprendiendo también el indicador (7) un calculador (12) que, a partir del número de vueltas medido por el captador angular (8), determina el número de vueltas efectuadas por la pluma, caracterizado porque el piñón (10) precitado tiene unos dientes (11) cuyo número (d) es igual a una potencia de dos(2 n ), de tal manera que la relación de reducción (R), definida como el cociente del número de dientes (D) de la corona (4) por el número de dientes (d) del piñón (10), sea un número decimal teniendo un número terminado de decimales, cualquiera que sea el número de dientes (D) de la corona (4), estando este número decimal introducido a su valor exacto en el calculador (12), para la determinación por este último del número de vueltas efectuadas por la pluma de la grúa a partir del número de vueltas medido por el captador angular (8)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07356125.
Solicitante: MANITOWOC CRANE GROUP FRANCE.
Nacionalidad solicitante: Francia.
Dirección: 18, RUE DE CHARBONNIERES 69130 ECULLY FRANCIA.
Inventor/es: Juraszek,Cédric.
Fecha de Publicación: .
Fecha Solicitud PCT: 21 de Septiembre de 2007.
Clasificación Internacional de Patentes:
- B66C13/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 13/00 Otras características de estructura o detalles. › Utilización de dispositivos indicadores de posicionado o de pesada (en los ganchos de grúa B66C 1/40; en los mecanismos de seguridad B66C 15/00; aparatos de pesada G01G; sistemas indicadores a distancia en general G08).
- B66C15/04B
- B66C23/94 B66C […] › B66C 23/00 Grúas que constan esencialmente de una viga, aguilón o una estructura triangular que actúan como brazo de palanca, montadas de forma que permitan movimientos de traslación o de orientación en planos verticales u horizontales, o bien una combinación de esos movimientos, p. ej. grúas de aguilón, derricks o grúas sobre torres (estructuras de torres que soportan la base B66C 5/00; adaptaciones de armazones que soportan las vías de rodadura B66C 6/00). › para limitar los movimientos de orientación o giro.
Clasificación PCT:
- B66C13/16 B66C 13/00 […] › Utilización de dispositivos indicadores de posicionado o de pesada (en los ganchos de grúa B66C 1/40; en los mecanismos de seguridad B66C 15/00; aparatos de pesada G01G; sistemas indicadores a distancia en general G08).
- B66C15/04 B66C […] › B66C 15/00 Mecanismos de seguridad (para mecanismo de enrollamiento de cuerdas, cables o de cadenas B66D 1/54). › para impedir las colisiones, p. ej. entre las grúas, o los carros que trabajan sobre la misma vía.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2362802_T3.pdf
Fragmento de la descripción:
La presente invención se refiere de manera general al campo técnico de las grúas. Esta invención se refiere, especialmente, a un dispositivo indicador de la posición en el espacio, es decir la orientación, de la pluma de una grúa de torre o de una grúa de pluma basculante.
Una grúa de torre tomada aquí como ejemplo tiene, de manera generalmente conocida, una pluma distribuidora que, gracias a un mecanismo motorizado de rotación, es orientable alrededor de un eje vertical, de tal manera que esta pluma pivota en un plano horizontal. La pluma puede así montarse pivotante a la cúspide de un mástil fijo de grúa, en este caso el mecanismo de rotación se sitúa a la punta del mástil. En otras realizaciones de grúa, la pluma es solidaria en rotación al mástil, situándose el mecanismo de rotación en este caso a la base del mástil de la grúa.
Para evitar que, en una obra, la pluma de una grúa venga en contacto accidentalmente con un obstáculo fijo o móvil, por ejemplo con otra grúa relativamente cercana, se utilizan ya unos sistemas de seguridad llamados anticolisión, tales como por ejemplo el sistema de detección de interferencias de grúas descrito en la patente francesa FR 2458504. Este sistema de seguridad tiende a obtener la parada de la rotación de la pluma de la grúa, antes de que ésta encuentre un obstáculo. Con este fin es necesario determinar en cualquier momento la posición de la parte giratoria de la grúa en el espacio, y para esto la grúa deba ser equipada de un dispositivo indicador específico capaz de detectar el ángulo instantáneo de orientación de la pluma.
En la práctica, la medida del ángulo de rotación de la pluma de una grúa está realizada mediante un captador angular que puede ser un potenciómetro o un codificador o cualquier otro captador equivalente, de tipo analógico o numérico. Este captador angular está accionado en rotación mediante un piñón, el cual engrana con una corona dentada que pertenece al mecanismo de rotación que equipa la grúa.
Tal ejemplo de captador está ilustrado en el documento US 3,760,401.
Así, durante la puesta en rotación de la pluma por el mecanismo motorizado precitado, el captador angular tal como el potenciómetro está él mismo accionado en rotación, por un árbol girando a una velocidad angular múltiple de la velocidad de la pluma en la relación de reducción R del juego de engranajes corona/piñón, sea R=D/d si D designa el número de dientes de la corona, y d el número de dientes del piñón ((se trata aquí muy especialmente de un relación multiplicadora, girando el piñón más a prisa que la pluma misma).
Para luego poder aprovechar convenientemente la rotación del captador tal como un potenciómetro, se utiliza actualmente una u otra de las dos soluciones siguientes:
- una primera solución, puramente mecánica, consiste en insertar para el accionamiento en rotación del captador un juego de engranajes suplementario, de relación inversa a la relación R=D/d (relación corona/piñón) anteriormente mencionada. Así, el captador angular gira en sincronismo perfecto con la pluma de la grúa, es decir que el captador describe él mismo exactamente una vuelta completa, para una vuelta completa de la pluma. En este caso, sin embargo el sistema es específico a cada par piñón/corona e, incluso si este sistema no introduce ningún error de medida gracias a la perfecta sincronización de rotación entre el captador y la pluma, tal sistema ciertamente no es universal teniendo en cuenta la variedad existente de coronas y de piñones.
- una segunda solución, permitiendo una cierta variedad de utilizaciones, consiste en predefinir un cierto número de pares estandarizados corona/piñón, a cada par correspondiendo una relación R=D/d que puede ser un número cualquiera. El captador angular tal como potenciómetro, cuya rotación está ligada a la de la pluma, totaliza así un número de vueltas (Nc) de este captador mismo. Un calculador integrado, que conoce la relación R del juego de engranajes (R=D/s sea: número de dientes de la corona / número de dientes del piñón), deduce el número de vueltas (Ng) efectuado por la pluma de la grúa. Por la fórmula de cálculo:
Ng = Nc / R
Sin embargo, en la medida en que la relación R es cualquiera, puede tratarse para él mismo como para su inversa 1/R de un número decimal teniendo un número de decimales infinito. En este caso, hay que truncar es decir redondear este número, es decir solo conservar un número limitado de decimales, para registrarlo y tratarlo en el calculador. Esto ocasiona un error sistemático en la determinación, a partir del número de vueltas del captador, del número de vueltas efectuadas por la pluma, por consiguiente en la determinación de la posición de la pluma misma, y como se entiende fácilmente este error solo podrá aumentar con el número de vueltas efectuadas en el mismo sentido por la pluma.
Tal error sistemático conduce a una indicación imprecisa de la orientación de la pluma, con una deriva más o menos importante con relación a la posición real de pluma, y puede tener unas consecuencias nefastas sobre el mando de la grúa y sobre la seguridad.
A título de ejemplo, refiriéndose a un escrito POTAIN TOP TRACING del Solicitante, edición del 12.03.02, referencia 92M-0150-012-0, páginas 18 y 19, indicando le elección y el montaje de los piñones del captador de orientación en función del tipo de corona, se constata:
- para una corona de 94 dientes y un piñón de 12 dientes:
una distancia angular de 0,357 grados por vuelta de la pluma;
- para una corona de 111 dientes y un piñón de 12 dientes:
una distancia angular de 0,566 grados por vuelta de la pluma.
Así el error no es despreciable y puede incluso elevarse de varios grados, después de un pequeño número de vueltas de la pluma de la grúa.
La invención tiende a evitar este inconveniente y tiene por objetivo suprimir el error sistemático debido a la relación de reducción, para obtener en todos los casos una indicación directa y exacta de la posición de la pluma, cualquiera que sea el número de vueltas efectuado por esta pluma, y sobre todo cualquiera que sea el número de dientes de la corona. En otros términos, el objetivo de la invención es obtener un indicador de posición que proporciona una indicación de rotación idéntica a la rotación real de la pluma, no obstante sin recurrir al artificio mecánico expuesto arriba (bajo la designación “primera solución”).
Este objetivo se alcanza por un indicador de posición presentando todas las características, en combinación, según la reivindicación 1.
Con este fin, se propone un indicador de la posición en el espacio, es decir de la orientación, de la pluma de una grúa, especialmente de una grúa de torre o de una grúa de pluma basculante, estando el indicador asociado a un mecanismo de rotación de la grúa y comprendiendo un captador angular accionado en rotación mediante un piñón que tiene unos dientes en número determinado (d), el cual engrana con una corona dentada teniendo unos dientes en número determinado (D) y perteneciendo al mecanismo de rotación de la grúa, de tal manera que la rotación del captador angular sea representativa de la rotación de la pluma de la grúa, comprendiendo también el indicador un calculador que, a partir del número de vueltas medido por el captador angular, determina el número de vueltas efectuadas por la pluma, estando este indicador de posición esencialmente caracterizado por el hecho de que el piñón precitado tiene unos dientes cuyo número (d) es igual a una potencia de dos (2n), de tal manera que la relación de reducción (R), definida como el cociente del numero de dientes (D) de la corona por el número de dientes (d) del piñón, sea un número decimal teniendo un número terminado de decimales, cualquiera que sea el número de dientes (D) de la corona, estando este número decimal introducido a su valor exacto en el calculador, para la determinación por este último del número de vueltas efectuada por la pluma de la grúa a partir del número de vueltas medido por el captador angular.
Así, cualquiera que sea el número de dientes de la corona, la elección para el piñón de un número de dientes que sea de una potencia de dos (2n), permite obtener una relación de reducción que sea un número con unas decimales en número terminado, relativamente bajo, y este relación puede por consiguiente introducirse, sin troncarse, en la memoria del calculador... [Seguir leyendo]
Reivindicaciones:
1. Indicador de la posición en el espacio, es decir de la orientación de la pluma de una grúa, especialmente de una grúa de torre o de una grúa de pluma basculante, estando el indicador (7) asociado a un mecanismo de rotación de la grúa y comprendiendo un captador angular (8) accionado en rotación mediante un piñón (10) teniendo unos dientes (11) en número determinado (d), dicho piñón (10) engrana con una corona dentada (4) que tiene unos 5 dientes (6) en número determinado (D) y perteneciendo al mecanismo de rotación de la grúa, de tal manera que la rotación del captador angular (8) sea representativa de la rotación de la pluma de la grúa, comprendiendo también el indicador (7) un calculador (12) que, a partir del número de vueltas medido por el captador angular (8), determina el número de vueltas efectuadas por la pluma, caracterizado porque el piñón (10) precitado tiene unos dientes (11) cuyo número (d) es igual a una potencia de dos(2n), de tal manera que la relación de reducción (R), definida comoel cociente del número de dientes (D) de la corona (4) por el número de dientes (d) del piñón (10), sea un número decimal teniendo un número terminado de decimales, cualquiera que sea el número de dientes (D) de la corona (4), estando este número decimal introducido a su valor exacto en el calculador (12), para la determinación por este último del número de vueltas efectuadas por la pluma de la grúa a partir del número de vueltas medido por el captador angular (8).
2. Indicación de posición de pluma para grúa según la reivindicación 1, caracterizado porque el número (d) de dientes (11) del piñón (10) es igual a dieciséis.
3. Indicador de posición de pluma para grúa según la reivindicación 1 o 2, caracterizado porque el captador angular
(8) asociado al piñón (10) es un codificador absoluto multivueltas.
4. Indicador de posición de pluma para grúa según la reivindicación 3, caracterizado porque la parte calculador (12) está integrada a dicho codificador, y porque el codificador proporciona así una señal que representa directamente la posición angular de la pluma.
Patentes similares o relacionadas:
Dispositivo de control remoto para grúa, máquina de construcción y/o camión industrial, y sistema que comprende este dispositivo de control remoto y una grúa, una máquina de construcción y/o un camión industrial, del 13 de Mayo de 2020, de LIEBHERR-WERK BIBERACH GMBH: Dispositivo de control remoto para una grúa, una máquina de construcción o un camión industrial, con un terminal móvil en forma de tableta que comprende una […]
Instalación de transporte de tambor con equipo de supervisión de cable, del 11 de Marzo de 2020, de OLKO-Maschinentechnik GmbH: Instalación de transporte de tambor de un solo cable con un tambor de cable accionado por un accionamiento de cabrestante que comprende un equipo de supervisión […]
Grúa y procedimiento para el monitoreo de la protección contra sobrecargas de una grúa de este tipo, del 8 de Enero de 2020, de Liebherr-Components Biberach GmbH: Grua con una pluma en la cual al menos un medio de recepcion de carga esta colocado de manera que puede elevarse y descender; en […]
Carretillas pórtico para el uso en terminales de contenedores y para otras finalidades de transporte, del 1 de Enero de 2020, de Pfenning Elektroanlagen GmbH: Carretilla pórtico para el uso en terminales de contenedores y para otras finalidades de transporte, con un bastidor , un dispositivo de elevación , que cuelga […]
Método para hacer funcionar al menos dos dispositivos de elevación en grupo, y conjunto que comprende al menos dos dispositivos de elevación, del 4 de Septiembre de 2019, de KONECRANES GLOBAL CORPORATION: Método para operar al menos dos engranajes de elevación en una operación grupal, en donde cada equipo de elevación tiene un polipasto, a través del cual un […]
 Grúa y procedimiento para monitorizar el limitador de sobrecarga de dicha grúa, del 26 de Junio de 2019, de LIEBHERR-WERK BIBERACH GMBH: Grúa con una pluma en la que al menos un elemento de izado está montado de manera que se puede elevar y descender, en donde un dispositivo limitador […]
Grúa y procedimiento para monitorizar el limitador de sobrecarga de dicha grúa, del 26 de Junio de 2019, de LIEBHERR-WERK BIBERACH GMBH: Grúa con una pluma en la que al menos un elemento de izado está montado de manera que se puede elevar y descender, en donde un dispositivo limitador […]
Procedimiento de control para un sistema de grúa que incluye una viga de separación, del 8 de Mayo de 2019, de Nissan Motor Manufacturing (UK) Ltd: Un procedimiento para detectar una condición de fallo en un sistema de grúa, el sistema de grúa que comprende una viga de separación […]
Sistema y método de elevación de material, del 8 de Mayo de 2019, de COLUMBUS MCKINNON CORPORATION: Un sistema de manejo de material que comprende un dispositivo de elevación de material; teniendo dicho dispositivo de elevación de […]