GRÚA PARA MANIPULAR OBJETOS.
1. Grúa para manipular objetos, que comprende una columna rotativa (2) que integra una base soporte (2a) donde se acopla una estructura plegable formada por varios brazos que se acoplan entre sí por sus extremos adyacentes mediante unos ejes de conexión,
donde dichos brazos se sitúan en distintas posiciones relativas por medicación de unos cilindros hidráulicos;
caracterizada porque:
- la estructura plegable (1) comprende al menos un primer brazo (9), un segundo brazo (10) y un tercer brazo (11), los cuales se vinculan entre sí mediante unos ejes de conexión: segundo (4) y tercero (5), en combinación con unos mecanismos de articulación formados por pares de manivelas o bielas (12), (13) que tienen unos extremos divergentes que articulan por separado en extremos adyacentes de los tres brazos, y unos extremos convergentes en los que se acoplan unos ejes comunes (14) en los que articulan unos cilindros hidráulicos: segundo (7) y tercero (8), por unos de sus extremos; donde los extremos convergentes de las manivelas son opuestos a sus extremos divergentes;
- los extremos opuestos de dichos cilindros hidráulicos: segundo (7) y tercero (8), articulan en unos pares de orejetas (16), (17) solidarias de unas zonas intermedias de los brazos: segundo (10) y tercero (11);
- el segundo brazo (10) y el tercer brazo (11) de la estructura plegable (1) están situados en un mismo primer plano vertical, mientras que el primer brazo (9) está situado en un segundo plano vertical adyacente al primer plano vertical;
donde en una posición totalmente recogida de la estructura plegable (1) se conforma un bloque con sus tres brazos dispuestos en direcciones paralelas ocupando una extensión correspondiente con una longitud seleccionada entre la longitud del primer brazo (9) y la longitud del segundo brazo (10).
2. Grúa para manipular objetos, según la reivindicación 1, caracterizada porque:
- la estructura plegable (1) está acoplada articuladamente a la base soporte (2a) de la columna rotativa (2) mediante un primer eje de conexión (3) paralelo a los ejes de conexión: segundo (4) y tercero (5) en los que articulan los tres brazos; donde dicho primer eje de conexión (3) vincula un extremo del primer brazo (9) con la base soporte (2a) de la columna rotativa (2) que articula en un bastidor (18);
- el primer brazo (9) se vincula a la base soporte (2a) de la columna rotativa (2) mediante un primer cilindro hidráulico (6) que articula por un extremo en un par de orejetas (15) solidarias a una parte intermedia del primer brazo (9) y por el extremo opuesto ese primer cilindro hidráulico (6) articula en la base soporte (2a) de la columna rotativa (2);
donde la activación y movilidad del primer cilindro hidráulico (6) sitúa al primer brazo (9) en distintas posiciones comprendidas entre una posición totalmente desplegada y una posición totalmente plegada.
3. Grúa para manipular objetos, según la reivindicación 2, caracterizado porque la estructura plegable (1) tiene movilidad giratoria a través de la columna rotativa (2) que está acoplada al bastidor (18); donde la columna rotativa (2) gira mediante la acción de un mecanismo transmisor de movimiento giratorio.
4. Grúa para manipular objetos, según la reivindicación 3, caracterizado porque el mecanismo transmisor de movimiento giratorio comprende una corona dentada que engrana con un piñón que recibe el movimiento de un elemento motor fijado al bastidor (18); donde la corona dentada es solidaria a la columna rotativa (2).
5. Grúa para manipular objetos, según la reivindicación 3, caracterizado porque el mecanismo transmisor de movimiento giratorio comprende al menos una cremallera de accionamiento hidráulico como su elemento motor, que ataca a un piñón solidario a la columna rotativa (2) como elemento receptor del giro.
6. Grúa para manipular objetos, según una cualquiera de las reivindicaciones anteriores, caracterizado porque al menos uno de los brazos de la estructura plegable comprende una estructura telescópica como medios para variar la longitud de dicha estructura plegable.
7. Grúa para manipular objetos, según la reivindicación 6, caracterizada porque el segundo brazo (10) y tercer brazo (11) comprenden unas camisas soporte (10a), (11a), dentro de las cuales se guían unas barras extensibles (10b), (11b) que se desplazan linealmente por el interior de las camisas soporte (10a), (11a).
8. Grúa para manipular objetos, según la reivindicación 7, caracterizada porque las barras extensibles (10b), (11b) se desplazan linealmente mediante unos cilindros hidráulicos adicionales (19), (20), los cuales están acoplados a las camisas soporte (10a), (11a) de los brazos: segundo (10) y tercero (11).
9. Grúa para manipular objetos, según una cualquiera de las reivindicaciones anteriores, caracterizada porque el tercer brazo (11) conecta con el segundo brazo (10) a través de la barra extensible (10b) perteneciente a este segundo brazo (10).
10. Grúa para manipular objetos, según una cualquiera de las reivindicaciones anteriores, caracterizada porque el segundo brazo (10) conecta con primer brazo (9) a través una barra extensible perteneciente a este primer brazo (9).
11. Grúa para manipular objetos, según una cualquiera de las reivindicaciones anteriores 3, 4 ó 5, caracterizada porque dentro del bastidor se aloja el mecanismo transmisor de movimiento giratorio, un depósito de aceite, una moto-bomba y los elementos de acoplamiento a un vehículo portante, así como la columna rotativa (2).
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201530015.
Solicitante: CONSTRUCCIONES Y TECNICAS DE MAQUINARIA,S.A.
Nacionalidad solicitante: España.
Inventor/es: MARTÍNEZ MACARRÓN,Cándido José.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66C23/42 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 23/00 Grúas que constan esencialmente de una viga, aguilón o una estructura triangular que actúan como brazo de palanca, montadas de forma que permitan movimientos de traslación o de orientación en planos verticales u horizontales, o bien una combinación de esos movimientos, p. ej. grúas de aguilón, derricks o grúas sobre torres (estructuras de torres que soportan la base B66C 5/00; adaptaciones de armazones que soportan las vías de rodadura B66C 6/00). › con aguilones de configuración regulable, p. ej. replegables.
- B66C23/68 B66C 23/00 […] › replegables o regulables de otra manera (B66C 23/687, B66C 23/70 tienen prioridad).
Fragmento de la descripción:
GRÚA PARA MANIPULAR OBJETOS
DESCRIPCiÓN
OBJETO DE LA INVENCiÓN
La presente invención, tal y como se expresa en el enunciado de esta memoria descriptiva, se refiere a una grúa para manipular objetos que comprende una estructura plegable acoplada a una base giratoria que está vinculada a un bastidor. Dicha estructura plegable está formada por tres brazos articulados entre sí: un primer brazo que articula por un extremo sobre la base giratoria, un segundo brazo que articula en el primer brazo y un tercer brazo que articula en el segundo brazo; donde en un extremo del tercer brazo incorpora unos accesorios o medios para manipular los distintos objetos, como puede ser un gancho, un mecanismo de pinza, un dispositivo giratorio, etc. Dichos medios pueden ser un dispositivo único o múltiple de accionamiento mecánico, eléctrico, hidráulico y/o múltiple.
Partiendo de esta premisa, con la estructura plegable de la grúa se consigue el plegado de los tres brazos en direcciones paralelas contactando entre sí y con una longitud máxima de 2, 5 m. que se corresponde con una anchura máxima permitida relacionada con la ordenación de tráfico en carreteras. También se consigue una altura mínima para no impedir la visíón del conductor ni interrumpir el haz de luz de los focos delanteros o traseros del vehículo.
Con la grúa de la invención también se consiguen unos alcances y una movilidad importantes que no son posibles con otras estructuras plegables de grúas conocidas. Además se destaca que es una estructura plegable completamente autónoma ó también dependiente de la energía del vehículo portante, cuando así se desee si está instalada directamente en un vehículo, como puede ser un camión.
ANTECEDENTES DE LA INVENCiÓN
En la actualidad son conocidos distintos tipos de grúa, entre las que cabe destacar aquellas que comprenden una estructura plegable formada por varios brazos que articulan entre sí por sus extremos adyacentes y los cuales se relacionan mediante unos cilindros hidráulicos para situarlos en distintas posiciones relativas de acuerdo a las necesidades, de forma que dicha estructura plegable está fijada sobre un vehículo o base. Estos brazos están destinados por ejemplo a la elevación de cargas y/o personas.
Se conocen otras grúas formadas también por una estructura plegable de brazos para realizar trabajos concretos, pero sobre bases fijas sin posibilidad de tantas articulaciones y extensiones combinadas.
En todos los casos, las estructuras de las grúas no son lo suficientemente compactos como para poder aplicarse en espacios reducidos. Además la fuente de energía suele hacerse mediante sistemas de toma de fuerza, bomba aplicada sobre el cambio del vehículo o grupos electro-hidráulicos independientes, siendo necesario que dicho vehículo esté con el motor encendido para poder maniobrar los brazos de la respectiva grúa o estar enchufado y en funcionamiento el grupo electro-hidráulico, lo cual supone una limitación.
DESCRIPCiÓN DE LA INVENCiÓN
Con el fin de alcanzar los objetivos y evitar los inconvenientes la grúa para manipular objetos comprende una columna rotativa que integra una base soporte donde se acopla una estructura plegable formada por varios brazos que se acoplan entre sí por sus extremos adyacentes mediante unos ejes de conexión, donde dichos brazos se sitúan en distintas posiciones relativas por medio de unos cilindros hidráulicos y sus bielas que implementan sus recorridos, potencias y armonía en sus movimientos.
La estructura plegable comprende al menos un primer brazo, un segundo brazo y un tercer brazo, los cuales se vinculan entre sí mediante unos ejes de conexión: segundo y tercero, en combinación con unos mecanismos de articulación formados por pares de manivelas que tienen unos extremos divergentes que articulan por separado en extremos adyacentes de los tres brazos, y unos extremos convergentes en los que se acoplan unos ejes comunes en los que articulan unos cilindros hidráulicos: segundo y tercero, por unos de sus extremos; donde los extremos convergentes de las manivelas son opuestos a sus extremos divergentes.
Los extremos opuestos de dichos cilindros hidráulicos: segundo y tercero, articulan en unos pares de orejetas solidarias de unas zonas intermedias de los brazos: segundo y tercero.
El segundo brazo y el tercer brazo de la estructura plegable están situados en un mismo primer plano vertical, mientras que el primer brazo está situado en un segundo plano vertical adyacente al primer plano vertical, donde en una posición totalmente recogida de la estructura plegable se conforma un bloque con sus tres brazos dispuestos en direcciones paralelas ocupando una extensión correspondiente con una longitud seleccionada entre la longitud del primer brazo y la longitud del segundo brazo.
La estructura plegable está acoplada articuladamente a la base soporte de la columna rotativa mediante un primer eje de conexión paralelo a los ejes de conexión: segundo y tercero en los que articulan los tres brazos; donde dicho primer eje de conexión vincula un extremo del primer brazo con la base soporte de la columna rotativa que articula a su vez en un bastidor.
El primer brazo se vincula a la base soporte de la columna rotativa mediante un primer cilindro hidráulico que articula por un extremo en un par de orejetas solidarias a una parte intermedia del primer brazo y por el extremo opuesto ese primer cilindro hidráulico articula en la base soporte de la columna rotativa.
La activación y movilidad del primer cilindro hidráulico sitúa al primer brazo en distintas posiciones comprendidas entre una posición totalmente desplegada y una posición totalmente plegada.
La estructura plegable tiene movilidad giratoria a través de la columna rotativa que está acoplada a un bastidor; donde la columna rotativa rota mediante la acción de un mecanismo transmisor de movimiento giratorio.
En una realización, el mecanismo transmisor de movimiento giratorio comprende una corona dentada que engrana con un piñón que recibe el movimiento de un elemento motor fijado al bastidor; donde la corona dentada es solidaria a la columna rotativa.
En otra realización, el movimiento giratorio de la estructura plegable se realiza a través de una o dos cremalleras de accionamiento hidráulico como su elemento motor, que ataca/n en un piñón solidario a la columna rotativa, que sustituye a la corona dentada, como elemento receptor del giro.
El primer brazo puede disponer de una estructura tubular plegable telescópica con medios para variar la longitud de dicha estructura mediante un cilindro hidráulico, para conseguir un mayor alcance y una mayor maniobrabilidad.
El segundo brazo y tercer brazo pueden disponer de una estructura tubular plegable telescópica con medios para variar la longitud de dicha estructura mediante un cilindro hidráulico, para conseguir un mayor alcance y una mayor maniobrabilidad.
Las barras extensibles se desplazan linealmente mediante unos cilindros hidráulicos adicionales, los cuales están acoplados a las camisas soporte de los brazos: primero, segundo y tercero.
El tercer brazo conecta con el segundo brazo a través de la barra extensible perteneciente a este segundo brazo e igual el segundo brazo con el primero.
Dentro del bastidor se aloja el mecanismo transmisor de movimiento giratorio, un depósito de aceite, una moto-bomba y los elementos de acoplamiento a un vehiculo portante, asi como la columna rotativa.
La grúa de la invención permite salvar barreras horizontales como son los tendidos eléctricos, entreplantas, etc. y acceder a interiores como entrar por puertas, ventanas, etc. que las grúas conocidas no permiten estos movimientos y accesos.
A continuación para facilitar una mejor comprensión de esta memoria descriptiva y formando parte integrante de la misma, se acompaña una serie de figuras en las que con carácter ilustrativo y no limitativo se ha representado el objeto de la invención.
BREVE DESCRIPCION DE LOS DIBUJOS
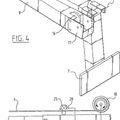
Figura 1. Representa una vista en alzado de la grúa para manipular objetos dispuesta en una posición vertical. Comprende entre sus elementos, una columna rotativa, una estructura plegable formada por un primer brazo, un segundo y un tercer brazo, donde los tres brazos articulan entre si por sus extremos adyacentes y el primer brazo con la columna rotativa. Figura 2. Representa otra vista en alzado de la grúa de la invención en una posición horizontal. Figura 3. Muestra una vista de la grúa en posición plegada. Figura 4. Muestra otra vista de la grúa en posición plegada también. Figura 5. Muestra una vista en planta de una parte de la estructura...
Reivindicaciones:
ES 1 136908 U
1. GRÚA PARA MANIPULAR OBJETOS, que comprende una columna rotativa (2) que integra una base soporte (2a) donde se acopla una estructura plegable formada por varios brazos que se acoplan entre si por sus extremos adyacentes mediante unos ejes de conexión, donde dichos brazos se sitúan en distintas posiciones relativas por medicación de unos cilindros hidráulicos; caracterizada por que: -la estructura plegable (1) comprende al menos un primer brazo (9) , un segundo brazo (10) Y un tercer brazo (11) , los cuales se vinculan entre sí mediante unos ejes de conexión: segundo (4) y tercero (5) , en combinación con unos mecanismos de articulación formados por pares de manivelas o bielas (12) , (13) que tienen unos extremos divergentes que articulan por separado en extremos adyacentes de los tres brazos, y unos extremos convergentes en los que se acoplan unos ejes comunes (14) en los que articulan unos cilindros hidráulicos: segundo (7) y tercero (8) , por unos de sus extremos; donde los extremos convergentes de las manivelas son opuestos a sus extremos divergentes; -los extremos opuestos de dichos cilindros hidráulicos: segundo (7) y tercero (8) , articulan en unos pares de orejetas (16) , (17) solidarias de unas zonas intermedias de los brazos: segundo (10) Y tercero (11) ; -el segundo brazo (10) Y el tercer brazo (11) de la estructura plegable (1) están situados en un mismo primer plano vertical, mientras que el primer brazo (9) está situado en un segundo plano vertical adyacente al primer plano vertical; donde en una posición totalmente recogida de la estructura plegable (1) se conforma un bloque con sus tres brazos dispuestos en direcciones paralelas ocupando una extensión correspondiente con una longitud seleccionada entre la longitud del primer brazo (9) y la longitud del segundo brazo (10) .
2. GRÚA PARA MANIPULAR OBJETOS, según la reivindicación 1, caracterizada por que: -la estructura plegable (1) está acoplada articuladamente a la base soporte (2a) de la columna rotativa (2) mediante un primer eje de conexión (3) paralelo a los ejes de conexión: segundo (4) y tercero (5) en los que articulan los tres brazos; donde dicho primer eje de conexión (3) vincula un extremo del primer brazo (9) con la base soporte (2a) de la columna rotativa (2) que articula en un bastidor (18) ;
ES 1 136908 U
- el primer brazo (9) se vincula a la base soporte (2a) de la columna rotativa (2) mediante un primer cilindro hidráulico (6) que articula por un extremo en un par de orejetas (15) solidarias a una parte intermedia del primer brazo (9) y por el extremo opuesto ese primer cilindro hidráulico (6) articula en la base soporte (2a) de la columna rotativa (2) ; donde la activación y movilidad del primer cilindro hidráulico (6) sitúa al primer brazo (9) en distintas posiciones comprendidas entre una posición totalmente desplegada y una posición totalmente plegada.
3. GRÚA PARA MANIPULAR OBJETOS, según la reivindicación 2, caracterizado por que la estructura plegable (1) tiene movilidad giratoria a través de la columna rotativa (2) que está acoplada al bastidor (18) ; donde la columna rotativa (2) gira mediante la acción de un mecanismo transmisor de movimiento giratorio.
4. GRÚA PARA MANIPULAR OBJETOS, según la reivindicación 3, caracterizado por que el mecanismo transmisor de movimiento giratorio comprende una corona dentada que engrana con un piñón que recibe el movimiento de un elemento motor fijado al bastidor (18) ; donde la corona dentada es solidaria a la columna rotativa (2) .
5. GRÚA PARA MANIPULAR OBJETOS, según la reivindicación 3, caracterizado por que el mecanismo transmisor de movimiento giratorio comprende al menos una cremallera de accionamiento hidráulico como su elemento motor, que ataca a un piñón solidario a la columna rotativa (2) como elemento receptor del giro.
6. GRÚA PARA MANIPULAR OBJETOS, según una cualquiera de las reivindicaciones anteriores, caracterizado por que al menos uno de los brazos de la estructura plegable comprende una estructura telescópica como medios para variar la longitud de de dicha estructura plegable.
7. GRÚA PARA MANIPULAR OBJETOS, según la reivindicación 6, caracterizada por que el segundo brazo (10) Y tercer brazo (11) comprenden unas camisas soporte (10a) , (11 a) , dentro de las cuales se guían unas barras extensibles (10b) , (11 b) que se desplazan linealmente por el interior de las camisas soporte (1 Oa) , (11 a) .
8. GRÚA PARA MANIPULAR OBJETOS, según la reivindicación 7, caracterizada por que las barras extensibles (10b) , (11 b) se desplazan linealmente mediante unos 11
ES 1 136908 U
cilindros hidráulicos adicionales (19) , (20) , los cuales están acoplados a las camisas soporte (1 Oa) , (11 a) de los brazos: segundo (10) Y tercero (11) .
9. GRÚA PARA MANIPULAR OBJETOS, según una cualquiera de las reivindicaciones 5 anteriores, caracterizada por que el tercer brazo (11) conecta con el segundo brazo (10) a través de la barra extensible (10b) perteneciente a este segundo brazo (10) .
10. GRÚA PARA MANIPULAR OBJETOS, según una cualquiera de las reivindicaciones anteriores, caracterizada por que el segundo brazo (10) conecta con primer brazo (9) a 10 través una barra extensible perteneciente a este primer brazo (9) .
11. GRÚA PARA MANIPULAR OBJETOS, según una cualquiera de las reivindicaciones anteriores 3, 4 ó 5, caracterizada por que dentro del bastidor se aloja el mecanismo transmisor de movimiento giratorio, un depósito de aceite, una moto-bomba y los elementos de acoplamiento a un vehículo portante, así como la columna rotativa (2) .
Patentes similares o relacionadas:
Grúa de soldadura con cabezal de soldadura, del 1 de Enero de 2020, de ESAB AB: Una grúa de soldadura para soldadura de objetos, cuya grúa de soldadura comprende: un brazo (A) que incluye al menos un primer […]
Grúa plegable en forma de Z, del 25 de Abril de 2019, de EPSILON KRAN GMBH: Grúa plegable en forma de Z, con - una columna de grúa - un brazo de elevación que está unido articuladamente por un extremo a la columna de […]
Grúa torre de desplegado y plegado automático y que comprende un mástil y una pluma desplazada con respecto al mástil, del 23 de Enero de 2019, de MANITOWOC CRANE GROUP FRANCE: Grúa torre , de desplegado y plegado automático, que comprende un mástil y una pluma configurados para situarse al menos: - en una configuración […]
Segmento de un brazo articulado y brazo articulado que comprende dicho segmento, del 24 de Mayo de 2017, de CIFA S.P.A.: Segmento de un brazo articulado hecho de material compuesto, con una forma alargada que define un eje longitudinal (Z) y que tiene una sección […]
Grúa que puede superar un punto muerto, del 6 de Julio de 2016, de EPSILON KRAN GMBH: Grúa, en especial grúa sobre vehículo con un primer brazo de la grúa y con al menos un segundo brazo de la grúa, unidos entre […]
Grúa de segmentos telescópicos y procedimiento de control de la misma, del 20 de Enero de 2016, de Palvi, S.L: Grúa de segmentos telescópicos del tipo que consta de: - un primer segmento dispuesto perpendicularmente sobre una plataforma móvil […]
Pluma para grúa de carga, del 4 de Junio de 2014, de PALFINGER AG: Pluma accionable hidráulicamente para una grúa de carga con: - por lo menos dos prolongaciones de pluma, habiéndose configurado la primera prolongación […]
 UN DISPOSITIVO PARA MANIPULAR UNA CARGA, del 13 de Agosto de 2010, de DE LILLE, ALLEBROER LEO ALIX: Aparato para desplazar una carga, que comprende una plataforma con una pluma telescópica movible en el plano vertical, un cabrestante soportado por […]
UN DISPOSITIVO PARA MANIPULAR UNA CARGA, del 13 de Agosto de 2010, de DE LILLE, ALLEBROER LEO ALIX: Aparato para desplazar una carga, que comprende una plataforma con una pluma telescópica movible en el plano vertical, un cabrestante soportado por […]