Métodos y sistemas de unión ala-fuselaje.
Un metodo (100) de union ala-fuselaje para una aeronave (12), comprendiendo el metodo:
(a) calcular (180) un ajuste virtual entre un conjunto (14) de ala y un conjunto (16) de fuselaje de la aeronave (12); y
b) medir un perfil 3D de una superficie (22) de interfaz de raiz del ala del conjunto (14) de ala, medir un perfil 3D de una superficie (32) de interfaz de adaptador del ala del conjunto (16) de fuselaje, y en donde el calculo (180) del ajuste virtual incluye calcular el ajuste virtual basado en el perfil 3D de la superficie de interfaz de raiz del ala y el perfil 3D de la superficie de interfaz del adaptador del ala;
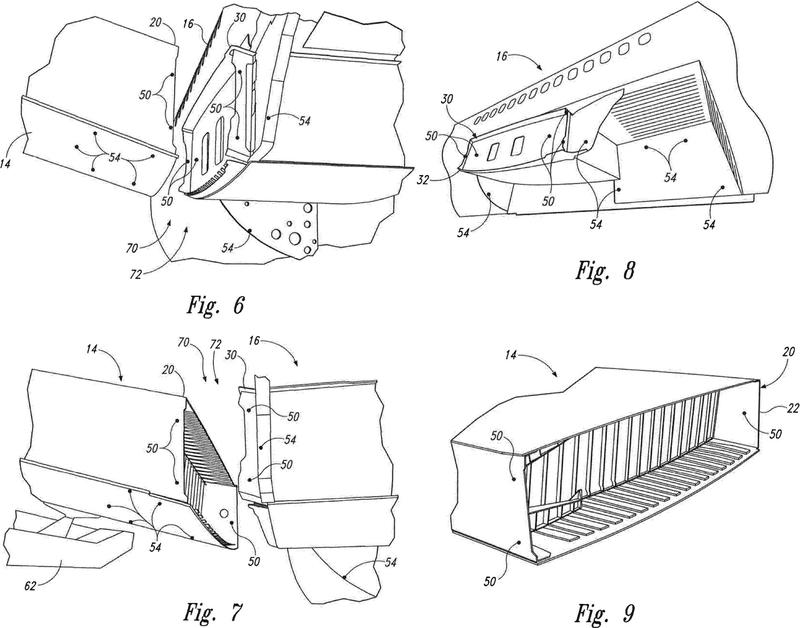
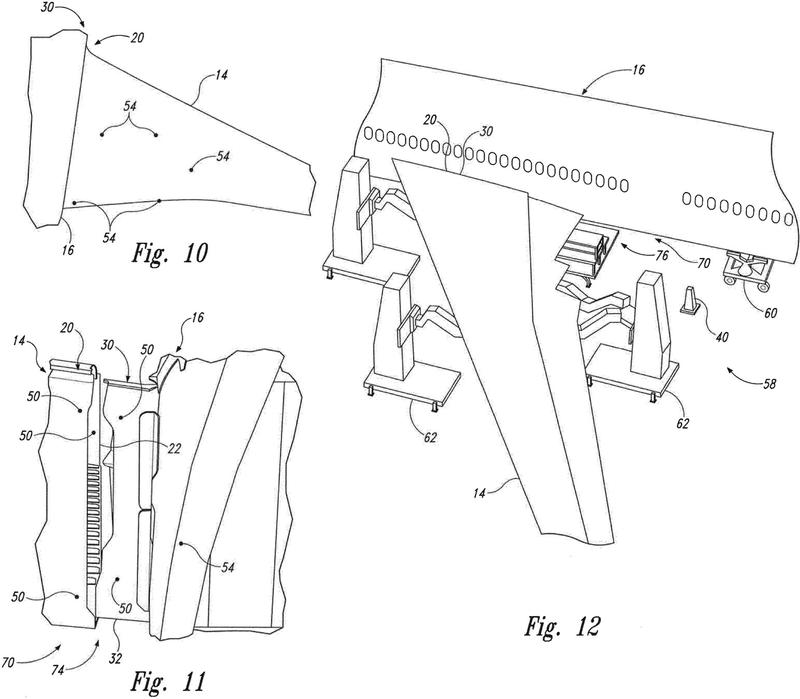
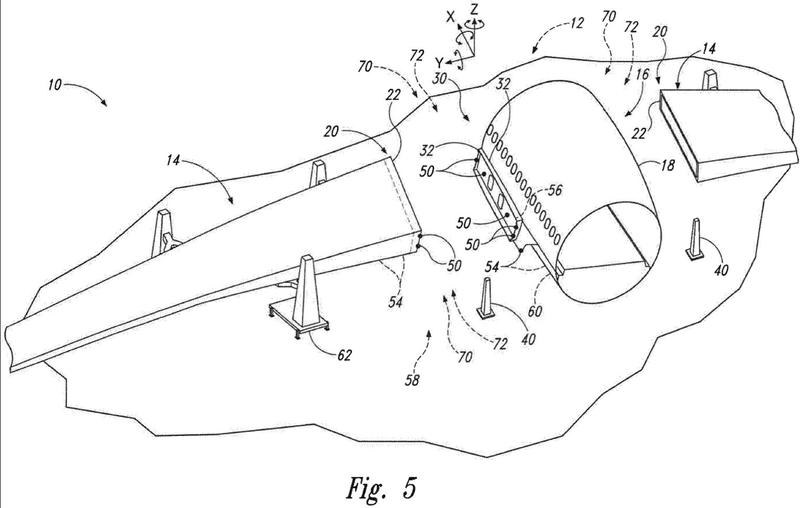
c) controlar (114) un sistema (58) de posicionamiento de ala para mover el conjunto (14) de ala de la aeronave (12) a un primer punto (70) de ruta a lo largo de una trayectoria de movimiento del conjunto (14) de ala entre una posicion separada y una posicion de acoplamiento, en donde la posicion de acoplamiento se define por el ajuste virtual, y en donde la trayectoria de movimiento esta basada en las formas conforme a obra reales del conjunto (14) de ala y del conjunto (16) de fuselaje, en donde las formas reales se modelan realizando (d) una exploracion 3D despues del control (c),
repetir de manera iterativa:
(i) determinar (152) una primera posicion del conjunto (14) de ala midiendo automaticamente ubicaciones tridimensionales de una pluralidad de objetivos (50, 54) de ala en el conjunto (14) de ala, (ii) calcular (154) una primera diferencia (Δ1) entre la primera posicion y el primer punto (70) de ruta, y (iii) controlar (150) el sistema de posicionamiento de ala para mover el conjunto (14) de ala para reducir una magnitud de la primera diferencia (Δ1), siempre que la magnitud de la primera diferencia (Δ1) sea mayor que una tolerancia de error (T1),
en donde la repeticion (d) de manera iterativa incluye la repeticion hasta que la magnitud de la primera diferencia (Δ1) sea menor o igual que la tolerancia de error (T1);
(e) despues de la repeticion (d) de manera iterativa, controlar (150) el sistema (58) de posicionamiento de ala para mover el conjunto (14) de ala a un segundo punto (70) de ruta a lo largo de la trayectoria de movimiento, en donde el segundo punto (70) de ruta esta mas cerca de la posicion de acoplamiento que el primer punto (70) de ruta;
(f) despues del control (c), repetir de manera iterativa:
(i) determinar (152) una segunda posicion del conjunto (14) de ala midiendo automaticamente ubicaciones tridimensionales de la pluralidad de objetivos (50, 54) de ala en el conjunto (14) de ala,
(ii) calcular (154) una segunda diferencia (Δ1) entre la segunda posicion y el segundo punto (70) de ruta, y
(iii) controlar (150) el sistema (58) de posicionamiento de ala para mover el conjunto (14) de ala para reducir una magnitud de la segunda diferencia (Δ1), siempre que la magnitud de la segunda diferencia (Δ1) sea mayor que la tolerancia de error (T1),
en donde la repeticion (f) de manera iterativa incluye la repeticion hasta que la magnitud de la segunda diferencia (Δ1) sea menor o igual que la tolerancia de error (T1).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E16198151.
Solicitante: THE BOEING COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 100 NORTH RIVERSIDE PLAZA CHICAGO, IL 60606-1596 ESTADOS UNIDOS DE AMERICA.
Inventor/es: COOKE,BARRY THEOPHILE, BODE,AKSEL, BUI,PETER HOANG, LEANDER,JOSEPH ALAN, DINH,NGAN MINH, KOOPMAN,PAUL ALAN, PUZEY,KEVIN RONALD.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64C1/26 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64C AEROPLANOS; HELICOPTEROS (vehículos de colchón de aire B60V). › B64C 1/00 Fuselajes; Características estructurales comunes a fuselajes, alas, superficies estabilizadoras o similares (características aerodinámicas comunes a fuselajes, alas, superficies estabilizadoras o similares B64C 23/00; instalaciones de la cabina de vuelo B64D). › Fijación de alas, conjuntos de cola o superficies estabilizadoras.
- G01B11/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00).
- G05B19/402 G […] › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › caracterizado por disposiciones de control para el posicionamiento, p. ej. centrado de una herramienta con respecto a un agujero en la pieza de trabajo, medios de detección adicionales para corregir la posición (G05B 19/19 tiene prioridad).
- G05B19/418 G05B 19/00 […] › Control total de una fábrica, es decir, control centralizado de varias máquinas, p. ej. control numérico directo o distribuido (DNC), sistemas de fabricación flexibles (FMS), sistemas de fabricación integrados (IMS), fabricación integrada por computador (CIM).
- G05B19/42 G05B 19/00 […] › Sistemas de registro y de reproducción, es decir, en los que el programa es registrado a partir de un ciclo de operaciones, p. ej. el ciclo de operaciones está controlado a mano, y a continuación este registro es reproducido en la misma máquina.
PDF original: ES-2784320_T3.pdf
Patentes similares o relacionadas:
Sistema de trabajo estéril, del 1 de Julio de 2020, de Shibuya Corporation: Un sistema de trabajo estéril para permitir que un trabajador realice un trabajo estéril requerido para cultivo dentro de una cámara estéril del sistema que tiene […]
Controlador de sistema transportador, sistema transportador y método de sincronización de datos, del 1 de Julio de 2020, de EWAB Engineering AB: Un controlador de sistema transportador , que comprende: una unidad de almacenamiento de datos configurada para almacenar una […]
Procedimiento y disposición para el control remoto de dispositivos de campo de al menos un sistema de automatización, del 17 de Junio de 2020, de SCHNEIDER ELECTRIC INDUSTRIES SAS: Procedimiento para el control remoto de al menos un dispositivo de campo (D1... Dn) en al menos un sistema de automatización (P1... Pk) con una unidad de control (BG); […]
Dispositivo y método para la transmisión de datos, del 10 de Junio de 2020, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo para la transmisión de datos con una interfaz de aparato de medición , una interfaz de control y una interfaz adicional […]
Procedimiento para hacer funcionar una planta de producción y planta de producción, del 3 de Junio de 2020, de SEW-EURODRIVE GMBH & CO. KG: Procedimiento para hacer funcionar una planta de producción son que la planta de producción tiene un sistema de control de nivel superior, estaciones de trabajo […]
Sistema transportador multizona con control basado en LAN, del 6 de Mayo de 2020, de MILWAUKEE ELECTRONICS CORPORATION: Un sistema de control de transportador para controlar un sistema transportador , configurado para transportar una serie de cargas, y […]
Métodos y aparatos para el control de calidad guiado de un sistema de envasado, del 6 de Mayo de 2020, de TETRA LAVAL HOLDINGS & FINANCE S.A.: Método para el control de calidad de un sistema de envasado, comprendiendo dicho método: recibir un registro de datos de identificación de envasado, estando relacionado […]
Sistema y método de control en bucle cerrado de firma de objetivo, del 6 de Mayo de 2020, de EMHART GLASS S.A.: Un sistema para ajustar automáticamente la regulación temporal de sucesos de operaciones en cavidades de una sección de una máquina de secciones individuales, […]