Dispositivo de árbol giratorio.
Un dispositivo de árbol giratorio que comprende un cárter fijo (21) y medios de accionamiento integrales con al menos uno entre uno o más árboles giratorios (8) del dispositivo de árbol giratorio,
teniendo cada medio de accionamiento su propia unidad de control y de alimentación integrada (11, 25), caracterizado por que comprende:
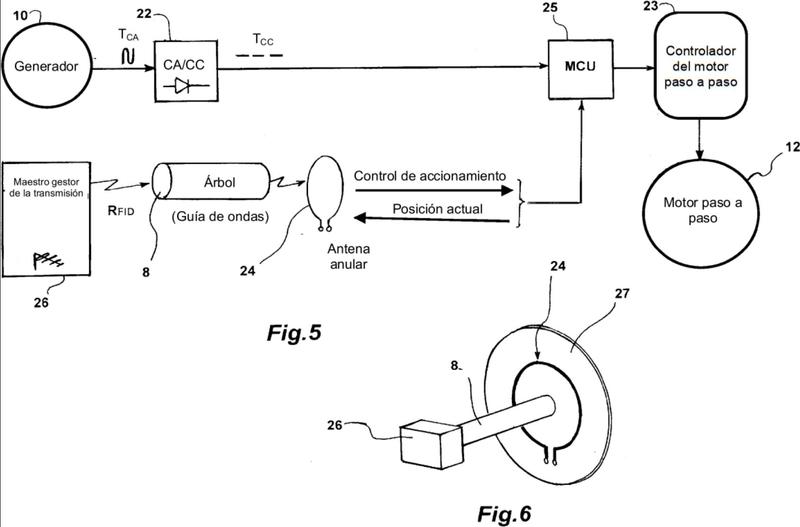
• una o más antenas anulares (24), conectadas a dicha unidad de control y de alimentación respectiva (11, 25) y dispuestas de manera que al menos rodeen parcialmente uno o más de dichos árboles giratorios (8), e integrales con el árbol giratorio (8) de la respectiva unidad de control y de alimentación (11, 25), de manera que dichos árboles giratorios (8) actúan como guía de ondas para las señales recibidas de dichas una o más antenas anulares (24) y destinados a ser recibidos por la respectiva unidad de control y de alimentación (11, 25) con el fin de accionar dicho medio de accionamiento asociado a la misma; y
• medios de radiotransmisión (26), integrales con el cárter (21) y asociados a uno o más de dichos árboles giratorios (8) para enviar señales a través de los mismos a dicha una o más antenas anulares (24).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2016/068340.
Solicitante: PIAGGIO & C. S.P.A..
Nacionalidad solicitante: Italia.
Dirección: VIALE RINALDO PIAGGIO 25 56025 PONTEDERA (PISA) ITALIA.
Inventor/es: NUTI,LUCA, CANTINI,JURY, MILANI,JEANPAUL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16D13/18 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16D ACOPLAMIENTOS PARA LA TRANSMISION DE MOVIMIENTOS DE ROTACION (transmisión para transmitir la rotación F16H, p. ej. transmisiones por fluidos F16H 39/00 - F16H 47/00 ); EMBRAGUES (embragues dinamo-eléctricos H02K 49/00; embragues que utilizan atracción electrostática H02N 13/00 ); FRENOS (sistemas de frenado electrodinámicos para vehículos, en general B60L 7/00; frenos dinamoeléctricos H02K 49/00). › F16D 13/00 Embragues de fricción (dispositivos para la sincronización F16D 23/02; embragues automáticos F16D 43/00 - F16D 45/00; control externo F16D 48/00). › teniendo la forma de segmentos articulados o que giran aisladamente.
- F16D28/00 F16D […] › Embragues accionados eléctricamente (disposiciones para sincronización F16D 23/02; embragues accionados directamente por medio de un electroiman F16D 27/00; embragues automáticos F16D 43/00 - F16D 45/00; control externo F16D 48/00).
- F16D48/06 F16D […] › F16D 48/00 Control externo de embragues. › Control por medios eléctricos o electrónicos, p. ej. de la presión de fluido.
- H01P1/06 ELECTRICIDAD. › H01 ELEMENTOS ELECTRICOS BASICOS. › H01P GUIAS DE ONDAS; RESONADORES, LINEAS, U OTROS DISPOSITIVOS DEL TIPO DE GUIA DE ONDAS (que funcionan con frecuencias ópticas G02B). › H01P 1/00 Dispositivos auxiliares (dispositivos de acoplamiento del tipo guía de ondas H01P 5/00). › Juntas móviles, p. ej. juntas rotativas.
PDF original: ES-2762971_T3.pdf
Fragmento de la descripción:
Dispositivo de árbol giratorio
[0001] La presente invención tiene como objeto un dispositivo de árbol giratorio que comprende medios de accionamiento integral con respecto a uno o más árboles giratorios, solicitando ser accionados con una señal y alimentados con energía. Dicho dispositivo es conocido gracias al documento US 6771031 B1.
[0002] Un ejemplo, incluso si es ofrecido como ejemplo no limitativo, puede estar constituido por un sincronizador para una transmisión de velocidad que puede utilizarse a bordo de un vehículo, en particular una motocicleta, donde la sincronización no es controlada con sistemas de tipo pasivo que se activan automáticamente en un cierto régimen de rotación, por ejemplo, un sincronizador de centrífuga, o que no se acciona mecánicamente desde el exterior.
[0003] El problema más evidente de un accionamiento integral con respecto a un árbol giratorio consiste en proporcionar una señal de activación a una unidad de control del accionamiento, que no puede ser conectada a un cableado.
[0004] La señal puede ser sin embargo transferida de muchas maneras, por ejemplo, con contactos deslizantes o por medio de electroimanes en el refuerzo del dispositivo de árbol giratorio, donde las variaciones en el campo magnético pueden ser detectadas por los sensores proporcionados en el árbol giratorio, pero estos sistemas tienen complejidades estructurales que pueden impedir una fácil planificación de los mismos.
[0005] El problema técnico subyacente de la presente invención es proporcionar un dispositivo de árbol giratorio que permita obviar el inconveniente mencionado con referencia a la técnica conocida. Tal problema es resuelto por medio de un dispositivo que se ha especificado anteriormente, definido en la reivindicación adjunta 1.
[0006] La principal ventaja del dispositivo de árbol giratorio según la presente invención reside en el hecho de explotar el árbol giratorio que soporta los medios de accionamiento sustancialmente como guía de ondas, con una antena situada en la posición ideal para recibir señales sin verse afectado por el régimen de rotación.
[0007] La presente invención se describirá en lo sucesivo según su ejemplo de realización preferida, proporcionado a modo de ejemplo y no con fines limitativos, haciendo referencia a los dibujos adjuntos donde:
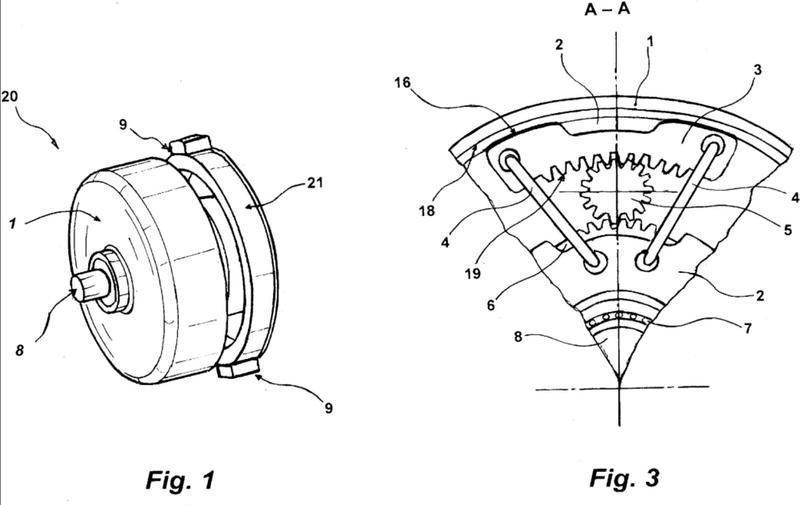
* la figura 1 muestra una vista axonométrica de un dispositivo de árbol giratorio, en particular un sincronizador, según la presente invención;
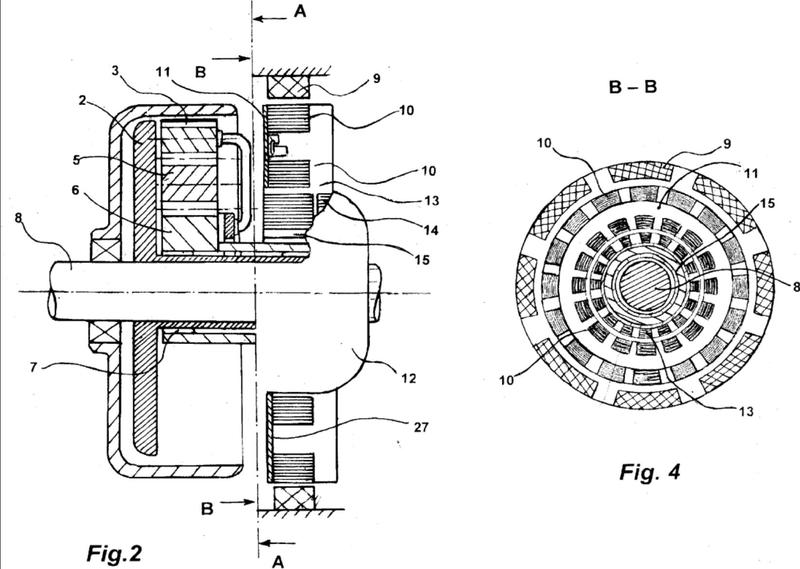
* la figura 2 muestra una sección longitudinal del sincronizador de la figura 1;
* la figura 3 muestra una primera sección transversal y parcial del sincronizador de la figura 1, según el plano de sección A-A de la figura 2;
* la figura 4 muestra una segunda sección transversal completa del sincronizador de la figura 1, según el plano de sección B-B de la figura 2;
* la figura 5 muestra un esquema de funcionamiento del dispositivo según la invención; y
* la figura 6 muestra una vista axonométrica de un detalle aplicativo del dispositivo.
[0008] Con referencia a las figuras 1 a 4, un sincronizador, designado en su conjunto con 20, se describirá a continuación a modo de ejemplo de un dispositivo de árbol giratorio que tiene medios de accionamiento con una placa integrada y una unidad de control y accionamiento integral con su árbol giratorio, sin fuente de alimentación directa y un sistema de conexión por cable para enviar señales a la unidad de control y accionamiento.
[0009] El sincronizador descrito en la presente memoria es de tipo accionado, es decir, que es del tipo que ejerce su función de sincronización cuando recibe un control de accionamiento externo, independientemente de sus condiciones de funcionamiento, en particular, del régimen de rotación del mismo, para permitir una lógica de control de la transmisión donde se inserta y/o el controlador para decidir el momento en el que una relación de transmisión de ratio ha de ser sincronizada en relación con un cambio de velocidad. Tal sincronizador entonces es diferente de los sincronizadores que accionan automáticamente una sincronización tras haberse producido ciertas condiciones relativas a sus parámetros de funcionamiento.
[0010] Lo que se describe a continuación se puede aplicar no solo a este ejemplo de sincronizador, sino a cualquier sincronizador accionado, así como a cualquier dispositivo de árbol giratorio que comprende medios de accionamiento que son arrastrados por un respectivo árbol giratorio y que solicita ser accionado por una lógica de control y/o por un operador mediante el envío de señales de control y en caso de recibir señales de estado u otras.
[0011] El sincronizador 20 del presente ejemplo comprende un árbol giratorio primario 8, sobre el cual está montado un elemento de soporte 2, con un transportador de rodillos 7 interpuesto entre los mismos, e inmediatamente después se solapa un miembro con forma de campana 1 del sincronizador. De esta manera, el elemento de soporte 2 está montado de forma giratoria en el árbol primario 8.
[0012] El elemento de soporte 2 tiene la forma de una placa que se extiende radialmente desde el árbol primario 8 y que está alojado dentro del miembro con forma de campana 1, que tiene una superficie cilíndrica interna de fricción, coaxial con el árbol primario 8.
[0013] Con referencia a la figura 3, en el elemento de soporte 2, se proporciona una primera cremallera 6, arrastrada de este modo en rotación. En la cremallera 5, un engranaje 5 está engranado que, a su vez, se engrana con una segunda cremallera 19 formada sobre la cara interna de una zapata 3. Tiene un perfil circular que, en condiciones normales, está al mismo nivel que el borde externo del elemento de soporte 2 del mismo y no sobresale; por lo tanto, está circunscrito dentro y contenido en el interior del borde externo del elemento de soporte 2, al no ser capaz de interferir, en condiciones normales, con el miembro con forma de campana 1.
[0014] La zapata 3 tiene una forma alargada y tiene una cara externa que actúa como una superficie de fricción, ya que se orienta hacia la superficie cilíndrica interna 18 del miembro con forma de campana 1.
[0015] Dicha superficie externa comprende un par de revestimientos 16, implementados por un recubrimiento fabricado a partir de material adecuado en los extremos de la zapata. De hecho, significa que las dos superficies de fricción formadas sobre los revestimientos 16 son adecuadas para implementar una fricción deslizante con la superficie cilíndrica interna 18 del miembro con forma de campana 1, capaz de frenar la rotación del miembro con forma de campana 1 con respecto al elemento de soporte 2.
[0016] En condiciones normales, la superficie de fricción formada en cada revestimiento 16 y la superficie cilíndrica interna 18 del miembro con forma de campana 1 no hacen contacto, puesto que la totalidad de la zapata 3 se incluye dentro de su elemento de soporte 2.
[0017] La zapata 3 está limitada con respecto al elemento de soporte 2, gracias a un par de brazos articulados 4: están abisagrados en los extremos de la primera cremallera 6 y en los extremos de la zapata 3 para así formar con los mismos un cuadrilátero articulado, siendo los brazos 4 de los mismos son las palancas. Tienen una disposición ampliamente separada y muestran una mayor inclinación que el radio que pasa a través de su junta junto al eje de rotación. El valor de esta inclinación puede estar comprendido entre 0° y 20°, según la sensibilidad que se quiera aportar al sistema de fricción.
[0018] Cabe destacar, de hecho, que por mover uno de los brazos en un determinado ángulo tanto en el sentido de las agujas del reloj como en el sentido contrario, la zapata 3 asume una posición que ya no sigue el perfil circular externo del elemento de soporte 2, sino que uno de sus extremos sobresale desde allí, interfiriendo con la superficie cilíndrica interna 18 del miembro con forma de campana 1.
[0019] La rotación de los brazos 4 entonces determina una traslación de la zapata lateral 3 con respecto a la posición de descanso de la misma, la cual es determinada por la fuerza centrífuga que actúa sobre la misma.
[0020] Este cambio representa entonces una desviación de una posición de equilibrio, y puede ser causado por la traslación de la zapata 3 que se describirá a continuación. Cabe destacar que, debido al efecto de los brazos 4, la zapata 3 está obligada a seguir una trayectoria predefinida que causa la interferencia de la misma con la superficie de fricción cilíndrica interna del...
Patentes similares o relacionadas:
Instrumento electroquirúrgico, del 11 de Diciembre de 2019, de Creo Medical Limited: Un aparato electroquirúrgico para aplicar energía de radiofrecuencia y/o energía de frecuencia de microondas a un tejido biológico, comprendiendo el aparato: […]
Eje integrado de alta transmisión/baja reflexión reforzado para estructuras de línea de transmisión de placas paralelas, del 10 de Abril de 2019, de ThinKom Solutions, Inc: Estructura de línea de transmisión de radiofrecuencias (RF), comprendiendo: una linea de transmisión de placas paralelas abierta a través de la cual las señales […]
Sistema de anillo deslizante de alta frecuencia de banda ancha, del 2 de Noviembre de 2018, de MOOG INC.: Un plato de anillo deslizante para un sistema de anillo de contacto, comprendiendo el plato: una placa de circuito impreso (PCB) con un primer lado y un segundo […]
Sistema de anillo deslizante de alta frecuencia de banda ancha, del 4 de Octubre de 2017, de MOOG INC.: Un sistema de sonda de contacto, que comprende: una placa de circuito impreso (PCB) que tiene un primer lado y un segundo lado que es opuesto […]
Radar secundario de vigilancia con una gran tasa de actualización, del 15 de Junio de 2016, de THALES: Radar secundario que consta al menos de un primer subsistema (10A) y de un segundo subsistema (10B) que integran cada uno unos medios de emisión de las interrogaciones, de recepción […]
Junta rotativa hidráulica sin junta de estanqueidad, del 5 de Noviembre de 2014, de SELEX ES S.p.A: Junta rotativa hidráulica, particularmente para ser provista entre una parte fija y una parte móvil de un grupo colector, comprendiendo la citada parte fija […]
SISTEMA DE ANTENA DE EXPLORACION., del 1 de Marzo de 2007, de ALENIA MARCONI SYSTEMS LIMITED: Una junta rotativa cuasi óptica para transmitir una radiación polarizada circularmente que comprende: una primera lente cuasi óptica que tiene un primer eje […]
 ACOPLAMIENTO ROTATORIO DE HF CON LINEA LAMBDA/4 ENTRE ESTATOR Y ROTOR, del 26 de Octubre de 2010, de SPINNER GMBH: Acoplamiento rotatorio de HF con un estator que está en conexión de HF con al menos un rotor a través de al menos una línea ?/4 y que rodea dicho rotor […]
ACOPLAMIENTO ROTATORIO DE HF CON LINEA LAMBDA/4 ENTRE ESTATOR Y ROTOR, del 26 de Octubre de 2010, de SPINNER GMBH: Acoplamiento rotatorio de HF con un estator que está en conexión de HF con al menos un rotor a través de al menos una línea ?/4 y que rodea dicho rotor […]