Tren de apoyo a tierra.
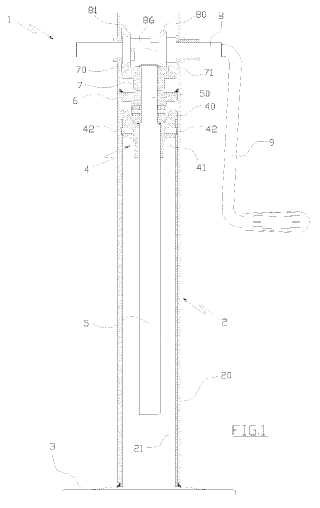
Pata de apoyo extensible, que comprende por lo menos dos partes deslizables recíprocamente (20,
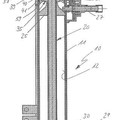
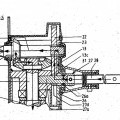
21), un tornillode maniobra (5) forzado axialmente hacia una primera parte (20) de las partes (20, 21), una voluta roscada (4)forzada axialmente hacia una segunda parte (21) de las partes (20, 21), y roscada sobre el tornillo de maniobra (5), yun árbol de accionamiento giratorio (8), conectado al tornillo de maniobra (5) mediante un cambio de marchasmecánico (70, 71, 80, 81, 86), y destinado a ser girado para poner en rotación a dicho tornillo de maniobra,comprendiendo además el cambio de marchas mecánico (70, 71, 80, 81, 86):
dos primeras coronas dentadas (71, 71), coaxiales y solidarias en rotación con el tornillo de maniobra (5);dos segundas coronas dentadas (80, 81) montadas de forma coaxial y con rotación loca sobre el árbol deaccionamiento (8),
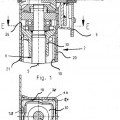
en la que un cursor (86), asociado de manera solidaria en rotación con una parte del árbol de accionamiento (8)comprendida entre las segundas coronas dentadas (80, 81), y que es móvil, en una dirección del eje del árbol deaccionamiento (8), entre una primera posición engranada y una segunda posición engranada, en la que el árbol deaccionamiento (8) es respectivamente solidario en rotación con una de las segundas coronas dentadas (80) y conla otra (81); caracterizada porque cada una de las segundas coronas dentadas (80, 81) engrana directamente conuna respectiva corona dentada de las primeras coronas dentadas (70, 71), de manera que se produzcan dosengranajes con relaciones de transmisión diferentes.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2010/060667.
Solicitante: Simol S.P.A.
Nacionalidad solicitante: Italia.
Dirección: Via Fiocchetti 14 42045 Luzzara (Reggio Emilia) ITALIA.
Inventor/es: RIGHETTI,VALTER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60S9/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60S MANTENIMIENTO, LIMPIEZA, REPARACION, ELEVACION O MANIOBRA DE VEHICULOS, NO PREVISTOS EN OTRO LUGAR. › B60S 9/00 Dispositivos sobre los vehículos, que toman contacto con el suelo para soportar, elevar o maniobrar el vehículo, total o parcialmente, p. ej. gatos incorporados (dispositivos de elevación en sí B66F; soportes en sí F16M). › estando el eje del tornillo sensiblemente vertical.
PDF original: ES-2421486_T3.pdf
Fragmento de la descripción:
Tren de apoyo a tierra.
Campo técnico
La invención se refiere a unas patas de apoyo que se ajustan normalmente a remolques, máquinas de construcción, máquinas agrícolas, vehículos industriales, carros de transporte o a cualquier tipo de vehículo para permitir un apoyo estable del mismo en el suelo cuando la máquina está estacionaria.
En particular, la presente invención se refiere a las patas de apoyo extensibles que pueden adoptar una configuración más corta, en la que el extremo inferior de las mismas está elevado del suelo, y una configuración extendida, en la que el extremo inferior de las mismas se apoya en el suelo.
Antecedentes de la técnica Como es sabido, las patas de apoyo extensibles comprenden esquemáticamente una columna telescópica que está fijada al vehículo, y un órgano de contacto que está fijado al extremo inferior de la columna telescópica.
El órgano de contacto generalmente es una plataforma o una rueda de tamaño reducido. La columna telescópica comprende por lo menos dos tubos coaxiales, de los cuales uno consiste en un tubo externo y el otro en un tubo interno que se introduce de forma deslizante en el tubo externo.
El órgano de contacto está fijado al extremo inferior del tubo interno que sobresale del tubo externo.
Se consigue alargar y acortar la columna telescópica mediante un tornillo de maniobra que está introducido en los tubos coaxiales.
El tornillo de maniobra está forzado hacia el tubo externo en sentido axial, y está enroscado en una voluta roscada forzada hacia el tubo interno en sentido axial.
Gracias a esta solución, el giro del tornillo de maniobra provoca un deslizamiento axial del tubo interno en sentido ascendente o en sentido descendente.
En el tipo de pata de apoyo a la que se refiere particularmente la presente invención, el giro del tornillo de maniobra se ve activado por un árbol de accionamiento.
El árbol de accionamiento está conectado al tornillo de maniobra por un engranaje intermedio y es girado por un motor o una manivela activada manualmente.
Cuando es necesario estabilizar el vehículo en el suelo, la columna telescópica se extiende hasta que el órgano de contacto se apoya en el suelo, y a continuación se extiende en mayor medida para elevar y soportar por lo menos una parte de la carga.
Con el fin de reducir el par que se tiene que aplicar necesariamente en la segunda fase de extensión, con el objetivo por ejemplo de reducir la potencia del motor o del esfuerzo del operario en el caso de existir una manivela activada manualmente, o de elevar una carga determinada con un par máximo determinado aplicable en la manivela, se puede utilizar un engranaje intermedio para realizar una relación de transmisión bastante alta entre el árbol de accionamiento y el tornillo de maniobra.
Cuando mayor sea la relación de transmisión del engranaje intermedio, mayor será el número de revoluciones necesarios en el árbol de accionamiento para que deslice el tubo interno en el tubo externo por una cantidad determinada.
Esto puede representar un inconveniente, porque significa en particular que la primera fase de extensión de la columna telescópica, es decir, la fase que es necesaria para apoyar el órgano de contacto en el suelo, puede convertirse en una operación sumamente lenta.
Con el fin de obviar o por lo menos reducir este inconveniente, una solución conocida consiste en interponer un cambio de marchas mecánica entre el árbol de accionamiento y el tornillo de maniobra, que puede producir por lo menos dos relaciones de transmisión diferentes.
Por ejemplo, la solicitud de patente nº CA 2.659.294 ilustra una pata de apoyo con un cambio de marchas mecánico que comprende dos engranajes con una relación de transmisión diferente. Cada uno de los engranajes comprende una primera rueda de engranaje montada en el árbol de accionamiento, que engrana con una segunda rueda de engranaje montada en un árbol intermedio y una tercera rueda de engranaje montada en el árbol intermedio, que a su vez engrana con una cuarta rueda de engranaje montada en el tornillo de maniobra. La primera rueda de engranaje de cada engranaje se desplaza en rotación loca sobre el árbol de accionamiento, que es móvil en sentido axial, con el fin de activar un sistema de engranaje que le hace solidario en rotación con la primera rueda de engranaje de un engranaje u otro.
La patente US 2008/0315570 describe una pata de apoyo con un cambio de marchas mecánico que comprende asimismo un árbol intermedio, interpuesto cinemáticamente entre el árbol de accionamiento y el tornillo de maniobra. El eje intermedio está conectado al tornillo de maniobra mediante un engranaje individual, mientras que está conectado al árbol de accionamiento mediante dos engranajes adicionales con relaciones de transmisión diferentes. Asimismo en este caso, el árbol de accionamiento es móvil en sentido axial con el fin de activar un sistema de engranaje que llega a activar uno u otro de los engranajes adicionales.
La patente EP 1.350.701 describe asimismo un cambio de marchas mecánico dotado de un árbol intermedio, que está conectado al árbol de accionamiento mediante dos engranajes con una relación de transmisión diferente, que se pueden activar de forma selectiva mediante un sistema de engranaje, mientras que está conectado al tornillo de maniobra mediante un engranaje individual con una relación de transmisión fija.
El mismo principio de construcción se describe asimismo en la patente US nº 5.238.266, que ilustra una pata de apoyo cuyo cambio de marchas comprende un árbol intermedio que está conectado continuamente al tornillo de maniobra mediante un engranaje individual. El árbol de accionamiento puede ser desplazado en sentido axial entre una posición en la que está acoplado directamente al eje intermedio, o en una posición en la que está conectado al eje intermedio mediante un grupo reductor. La solicitud de patente US 2001/020781, a nombre del mismo inventor que la patente anterior, describe una variante constructiva de la misma solución.
Finalmente, la solicitud de patente alemana DE 196.16.704 describe una pata de apoyo de tipo convencional, en la que el tornillo de maniobra está conectado a un eje intermedio mediante un engranaje fijo, mientras que el eje intermedio está conectado al árbol de accionamiento mediante un cambio de marchas alojado en una caja situada en la parte exterior de la pata de apoyo.
Todas las soluciones conocidas tienen en común el hecho de comprender un cambio de marchas que comprende un eje de transmisión intermedio, interpuesto cinemáticamente entre el tornillo de maniobra y el árbol de accionamiento.
Aunque estas soluciones dan buenos resultados, requieren el uso y el montaje de numerosos componentes mecánicos y ruedas de engranaje, haciendo la realización del cambio de marchas bastante complicada, así como cara.
Además, los cambios de marcha que se realizan en las soluciones conocidas proporcionadas anteriormente no son muy manejables, y incrementan las dimensiones globales de la pata de apoyo, lo que evidentemente hace que sea necesario un espacio mayor para montarlas en los vehículos.
Un objetivo de la presente invención consiste en hacer disponible una pata de apoyo con un cambio de marchas que es más sencillo, más compacto y más económico con respecto a las soluciones conocidas, pero que resulta igualmente funcional y eficaz.
Otro objetivo consiste en proporcionar un cambio de marchas que de todas maneras puede limitar eficazmente el par a aplicar al árbol de accionamiento en la segunda fase de extensión de la pata de apoyo, durante la cual se eleva la carga, garantizando sin embargo una rapidez suficiente de la primera fase de extensión durante la cual el órgano de contacto se acerca al suelo.
Otro objetivo de la invención consiste en alcanzar el objetivo mencionado anteriormente en el ámbito de una solución sencilla, racional y relativamente económica.
Exposición de la invención Se consiguen estos objetivos mediante las características de la invención tal y como se define en la reivindicación 1 independiente. Las reivindicaciones subordinadas definen aspectos preferidos y/o particularmente ventajosos de la invención.
En particular, se prevé un pie de apoyo extensible que comprende en su conjunto por lo menos dos partes recíprocamente deslizables, un tornillo de maniobra forzado hacia una primera de dichas partes, en sentido axial, una voluta roscada forzada hacia una segunda de dichas partes, en sentido axial, y roscada sobre el tornillo de maniobra, y un árbol de accionamiento giratorio, conectado al tornillo de maniobra mediante... [Seguir leyendo]
Reivindicaciones:
1. Pata de apoyo extensible, que comprende por lo menos dos partes deslizables recíprocamente (20, 21) , un tornillo de maniobra (5) forzado axialmente hacia una primera parte (20) de las partes (20, 21) , una voluta roscada (4)
forzada axialmente hacia una segunda parte (21) de las partes (20, 21) , y roscada sobre el tornillo de maniobra (5) , y un árbol de accionamiento giratorio (8) , conectado al tornillo de maniobra (5) mediante un cambio de marchas mecánico (70, 71, 80, 81, 86) , y destinado a ser girado para poner en rotación a dicho tornillo de maniobra, comprendiendo además el cambio de marchas mecánico (70, 71, 80, 81, 86) :
dos primeras coronas dentadas (71, 71) , coaxiales y solidarias en rotación con el tornillo de maniobra (5) ;
dos segundas coronas dentadas (80, 81) montadas de forma coaxial y con rotación loca sobre el árbol de accionamiento (8) ,
en la que un cursor (86) , asociado de manera solidaria en rotación con una parte del árbol de accionamiento (8) comprendida entre las segundas coronas dentadas (80, 81) , y que es móvil, en una dirección del eje del árbol de accionamiento (8) , entre una primera posición engranada y una segunda posición engranada, en la que el árbol de accionamiento (8) es respectivamente solidario en rotación con una de las segundas coronas dentadas (80) y con la otra (81) ; caracterizada porque cada una de las segundas coronas dentadas (80, 81) engrana directamente con una respectiva corona dentada de las primeras coronas dentadas (70, 71) , de manera que se produzcan dos engranajes con relaciones de transmisión diferentes.
2. Pata de apoyo según la reivindicación 1, caracterizada porque comprende exactamente un solo árbol giratorio,
conectado en un mecanismo cinemático al tornillo de maniobra (5) , siendo el árbol giratorio el árbol de 25 accionamiento (8) .
3. Pata de apoyo según cualquiera de las reivindicaciones anteriores, caracterizada porque el cursor (86) está bloqueado en la dirección axial en el árbol de accionamiento (8) , que es móvil en la dirección del eje del mismo para desplazar el cursor (86) entre las posiciones engranadas.
4. Pata de apoyo según cualquiera de las reivindicaciones anteriores, caracterizada porque el cursor (86) presenta unos lados laterales opuestos, cada uno de los cuales está provisto de por lo menos un dentado frontal (87) destinado a acoplarse por lo menos a un dentado frontal (85) de la segunda corona dentada (80, 81) enfrentado al mismo, con el fin de producir un engranaje.
5. Pata de apoyo según cualquiera de las reivindicaciones anteriores, caracterizada porque las primeras coronas dentadas (70, 71) están realizadas en un solo cuerpo (7) o en dos cuerpos independientes.
6. Pata de apoyo según cualquiera de las reivindicaciones anteriores, caracterizada porque comprende una 40 manivela (9) destinada a ser activada manualmente con el fin de poner en rotación el árbol de accionamiento (8) .
7. Pata de apoyo según la reivindicación 6, caracterizada porque la manivela (9) está formada en un solo cuerpo con el árbol de accionamiento (8) .
8. Pata de apoyo según cualquiera de las reivindicaciones anteriores, caracterizada porque el árbol de accionamiento (8) puede estar conectado a un motor para poner en rotación el árbol de accionamiento (8) .
9. Pata de apoyo según cualquiera de las reivindicaciones anteriores, caracterizada porque el cursor (86) está
asociado a unos medios automáticos para desplazar el cursor (86) entre las posiciones engranadas. 50
Patentes similares o relacionadas:
Soporte de cambio automático de doble velocidad, del 23 de Noviembre de 2016, de JOST INTERNATIONAL CORP.: Un soporte de múltiples velocidades , comprendiendo dicho soporte : una carcasa y un elemento de pata telescópico […]
Segmento de rueda fundido para un gato de soporte, del 7 de Mayo de 2012, de JOST-WERKE GMBH.: Segmento de rueda para la colocación pivotante de una placa base a un gato de soporte , donde el segmento de rueda presenta un […]
 Dispositivo elevador, del 25 de Abril de 2012, de HAACON HEBETECHNIK GMBH: Dispositivo elevador , en especial soporte de semirremolque o similar, con un tubo de vástago y un tubo de apoyo desplazable respecto al tubo […]
Dispositivo elevador, del 25 de Abril de 2012, de HAACON HEBETECHNIK GMBH: Dispositivo elevador , en especial soporte de semirremolque o similar, con un tubo de vástago y un tubo de apoyo desplazable respecto al tubo […]
DISPOSITIVO ELEVADOR, del 5 de Diciembre de 2011, de HAACON HEBETECHNIK GMBH: Dispositivo generador en particular soporte de semirremolque o similar, con un tubo exterior y un tubo de apoyo desplazable […]
SOPORTE DE ALTURA REGULABLE PARA SEMIRREMOLQUES O SIMILARES, del 10 de Junio de 2011, de SAF-HOLLAND VERKEHRSTECHNIK GMBH: Soporte de altura regulable para semirremolques o similares con un tubo exterior de soporte montado en forma estacionaria, un tubo interior […]
 SOPORTE REGULABLE EN LA ALTURA PARA SEMI-REMOLQUES O SIMILARES, del 20 de Mayo de 2011, de SAF-HOLLAND VERKEHRSTECHNIK GMBH: Soporte regulable en la altura para semi-remolques o similares, que comprende un cuerpo tubular montado estacionario, un tubo interior de soporte […]
SOPORTE REGULABLE EN LA ALTURA PARA SEMI-REMOLQUES O SIMILARES, del 20 de Mayo de 2011, de SAF-HOLLAND VERKEHRSTECHNIK GMBH: Soporte regulable en la altura para semi-remolques o similares, que comprende un cuerpo tubular montado estacionario, un tubo interior de soporte […]
 PATA DE APOYO, del 5 de Mayo de 2011, de JOST-WERKE GMBH.: Pata de apoyo, en particular para el soporte de semi-remolques, con un dispositivo de soporte que se puede desplazar de manera telescópica en términos de su altura, […]
PATA DE APOYO, del 5 de Mayo de 2011, de JOST-WERKE GMBH.: Pata de apoyo, en particular para el soporte de semi-remolques, con un dispositivo de soporte que se puede desplazar de manera telescópica en términos de su altura, […]
 TREN DE ESTACIONAMIENTO Y MÉTODO DE ENSAMBLAJE, del 15 de Marzo de 2011, de SAF-HOLLAND, INC: Ensamblaje de tren de estacionamiento para soportar de manera selectiva un semirremolque , donde el ensamblaje de tren de estacionamiento […]
TREN DE ESTACIONAMIENTO Y MÉTODO DE ENSAMBLAJE, del 15 de Marzo de 2011, de SAF-HOLLAND, INC: Ensamblaje de tren de estacionamiento para soportar de manera selectiva un semirremolque , donde el ensamblaje de tren de estacionamiento […]