METODO Y DISPOSITIVO PARA LA LOCALIZACION DE FALTAS.
Método de localización de una falta en una sección de al menos una línea de transmisión que comprende:
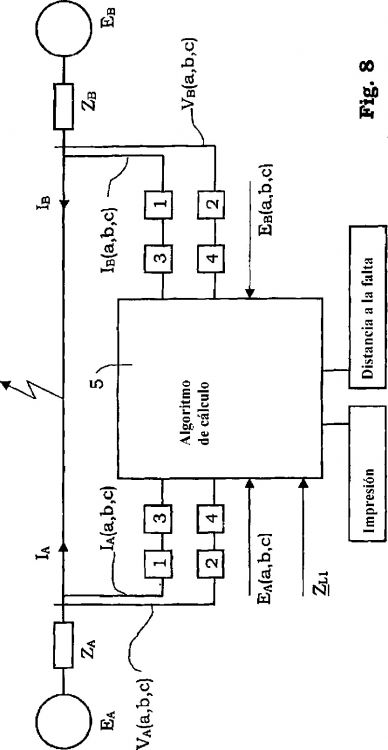
- la medición de las tensiones e intensidades en ambos extremos, A y B, de la sección,
- la obtención de los fasores de secuencia positiva de las tensiones VA1, VB1 medidos en los extremos A y B, respectivamente,
- la obtención de los fasores de secuencia positiva de las intensidades IA1, IB1 medidos en los extremos A y B, respectivamente,
- el uso de un esquema del circuito equivalente para las magnitudes de secuencia positiva, obteniendo de ese modo
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE01/02772.
Solicitante: ABB AB.
Nacionalidad solicitante: Suecia.
Dirección: ABB AB INTELLECTUAL PROPERTY INGENJOR BAATHS GATA 11,721 83 VASTERAS.
Inventor/es: SAHA, MURARI, IZYKOWSKI, JAN, ROSOLOWSKI, EUGENIUSZ.
Fecha de Publicación: .
Fecha Concesión Europea: 16 de Junio de 2010.
Clasificación Internacional de Patentes:
- G01R31/08C
Clasificación PCT:
- G01R31/08 FISICA. › G01 METROLOGIA; ENSAYOS. › G01R MEDIDA DE VARIABLES ELECTRICAS; MEDIDA DE VARIABLES MAGNETICAS (indicación de la sintonización de circuitos resonantes H03J 3/12). › G01R 31/00 Dispositivos para ensayo de propiedades eléctricas; Dispositivos para la localización de fallos eléctricos; Disposiciones para el ensayo eléctrico caracterizadas por lo que se está ensayando, no previstos en otro lugar (ensayo o medida de dispositivos semiconductores o de estado sólido, durante la fabricación H01L 21/66; ensayo de los sistemas de transmisión por líneas H04B 3/46). › Localización de defectos en los cables, líneas de transmisión o redes.
Clasificación antigua:
- G01R31/08 G01R 31/00 […] › Localización de defectos en los cables, líneas de transmisión o redes.
Fragmento de la descripción:
Método y dispositivo para la localización de faltas.
Área técnica
El presente método de localización de faltas, que se expone en el presente documento, se basa en la utilización de mediciones no sincronizadas de las tensiones e intensidades trifásicas adquiridas sin sincronización en los terminales de las líneas. Se determinan los fasores de los componentes simétricos de las magnitudes medidas y se usan en el algoritmo de localización de faltas. Básicamente, los fasores de secuencia positiva de las magnitudes posteriores a la falta se usan para la estimación de la distancia a la falta y es un rasgo distintivo que tal estimación de una distancia a la falta se realiza sin involucrar técnicas iterativas.
Antecedentes de la invención
Se han desarrollado y probado varios métodos y enfoques para la localización de faltas en sistemas eléctricos de alta tensión. Un enfoque ha sido utilizar transductores de tensión/intensidad situados en los terminales, entre los que transcurren las líneas eléctricas que se están supervisando.
Uno de tales sistemas se describe en la Patente de Estados Unidos Nº 5.455.776 en la que los transductores se conectan a bloques de transductores y a un procesador de estimación de la localización de la falta. El sistema usa redes de secuencia positiva o negativa.
Se usan cálculos iterativos en el documento US 5.455.776 para la determinación del ángulo de sincronización. En el método descrito en el documento US 5.455.776, el ángulo de sincronización desconocido (d) se ha de calcular por un método iterativo de Newton-Raphson y después de esto, puede determinarse la distancia la falta. El enfoque de Newton-Raphson utilizado en el método, comienza a partir de la suposición inicial para el ángulo de sincronización fijada en un cierto valor predefinido (normalmente igual a cero). Como resultado de los cálculos iterativos, se alcanza la solución matemática más próxima (que es la más cercana a la suposición inicial asumida). Este enfoque parece ser razonable para una mayoría de aplicaciones, dado que la otra solución para el ángulo de sincronización (que es posible matemáticamente pero se ha rechazado aquí) está normalmente muy lejos de la suposición inicial asumida y fuera de un intervalo razonable. Sin embargo, en algunos casos de faltas graves (gran diferencia en los instantes de detección de la aparición de una falta realizada en ambos extremos de la línea) hay un riesgo de que la solución rechazada se considere como un resultado correcto, mientras que la solución alcanzada sea la falsa.
Breve descripción de la invención
El objeto de la presente invención es mejorar el sistema del documento US 5.455.776 y proporcionar un método que significa la localización de una falta utilizando mediciones no sincronizadas de las tensiones e intensidades trifásicas adquiridas sin sincronización en los terminales de la línea. Este objeto se logra mediante un método de acuerdo con la reivindicación 1, mediante un dispositivo de acuerdo con la reivindicación 6 y mediante un producto programa de ordenador de acuerdo con la reivindicación 7.
Se determinan y se usan en el algoritmo de localización de la falta fasores de los componentes simétricos de las magnitudes medidas. De acuerdo con una realización, los fasores de secuencia positiva de las magnitudes posteriores a la falta se usan para la estimación de la distancia a la falta y es un rasgo distintivo que tal estimación de una distancia a la falta se realice esencialmente sin involucrar técnicas iterativas. En esta realización, la etapa del algoritmo de localización de la falta se realiza independientemente del tipo de falta. En etapas posteriores, se puede obtener el tipo de falta. De acuerdo con otra realización de la invención, en el momento de aparición de una falta, se determina el tipo de falta. Si se determina que no es una falta trifásica equilibrada, se usan los fasores de secuencia negativa para la estimación de la distancia a la falta. Por otro lado, si es una falta trifásica equilibrada, se usan los fasores de secuencia positiva incrementales. Los fasores de secuencia positiva incrementales han de entenderse como la diferencia entre los valores posteriores a la falta y los previos a la falta.
Además, sólo para algunos casos -bastante raros- el algoritmo de localización de la falta se dirige hacia las dos ramas opcionales (A y B). Esto se realiza solamente para la selección del resultado válido de una distancia a la falta.
La primera rama (A) se basa en la comparación de los valores del ángulo de sincronización determinado. Se utiliza en las mediciones previas a la falta (A1) o posteriores a la falta de las fases sanas (A2). Dado que en las faltas equilibradas trifásicas no hay fases sanas, cuando se usa la rama secundaria (A2) para tales faltas, se determina la impedancia de la trayectoria de la falta tomando los fasores de secuencia positiva. El carácter resistivo de esta impedancia indica la solución válida, tal como se usará también en la rama secundaria (B1).
La otra rama (B) requiere la distinción de si es un tipo de falta equilibrada trifásica u otro tipo de falta no simétrica. Para faltas equilibradas trifásicas (B1) se determina la impedancia de la trayectoria de la falta tomando los fasores de secuencia positiva y el carácter resistivo de esta impedancia indica la solución válida. Para otros tipos de falta (B2), se usan las magnitudes de la secuencia negativa para la estimación de la distancia a la falta.
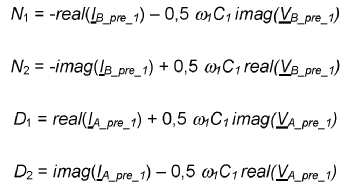
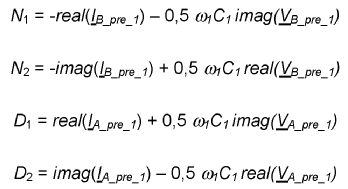
Para proporcionar una alta precisión de localización de la falta la estimación obtenida inicialmente para la distancia a la falta se somete a un refinamiento mediante la compensación de las capacidades en derivación de una línea.
Dado que las magnitudes de secuencia cero no están involucradas en el algoritmo presentado, el algoritmo es aplicable para la localización de faltas tanto en una línea sencilla como en líneas de transmisión en paralelo mutuamente acopladas.
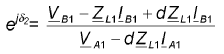
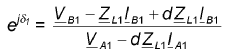
El método de acuerdo con la presente invención difiere sustancialmente del método introducido en el documento US 5.455.776. El ángulo de sincronización (d), que relaciona las mediciones en ambos terminales de línea con el tiempo base común, no está involucrado aquí en el cálculo de la distancia a la falta en sí. De hecho, el ángulo de sincronización se usa en el algoritmo de localización de la falta presentado. Sin embargo, se usa para otras finalidades, concretamente para seleccionar el resultado válido de una distancia a la falta y es opcional y no obligatorio. En el algoritmo de acuerdo con la presente invención la forma óptima de selección, cuando A (A1 o A2) se puede sustituir por la forma B (B1 junto con B2), donde la última no involucra el ángulo de sincronización.
El método propuesto evita los cálculos iterativos durante la determinación de la distancia a la falta y a la vez considera todas las soluciones matemáticamente posibles para la distancia a la falta observada y en consecuencia para el ángulo de sincronización. Esto garantiza que independientemente de los parámetros de la red de transmisión considerada y de las especificaciones de la falta se alcanza siempre la solución única. Por ello, por ejemplo, el algoritmo se puede adaptar para la localización de faltas en líneas serie compensadas, que se consideran como redes extremadamente complejas. Al proporcionar la solución única es por ello especialmente deseada para tales aplicaciones.
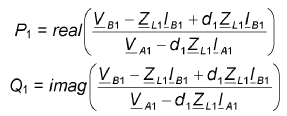
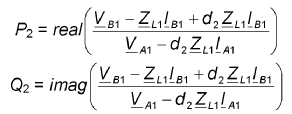
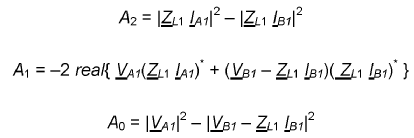
De acuerdo con una realización, el procedimiento de localización de la falta comienza con la resolución de la ecuación cuadrática que involucra solamente los fasores de secuencia positiva. Esto da dos soluciones para la distancia a la falta y sólo uno de ellos corresponde al valor real. El resultado válido en la inmensa mayoría de los casos se obtiene directamente si solamente una solución sencilla para la distancia a la falta cae dentro de la longitud de la línea. Entre tanto, en algunos casos muy raros se requiere una selección adicional del resultado válido y tampoco se aplican para eso cálculos iterativos.
En el caso de faltas simétricas trifásicas se aplica el procedimiento de selección original. Este procedimiento selecciona el resultado válido mediante la comprobación de qué solución da como resultado una parte imaginaria menor (idealmente debería ser cero) de la impedancia estimada para una trayectoria de la falta.
De acuerdo con otra realización, la primera etapa...
Reivindicaciones:
1. Método de localización de una falta en una sección de al menos una línea de transmisión que comprende:











2. Método de acuerdo con la reivindicación 1, que comprende además la utilización de fasores de las tensiones e intensidades de la fase sana particular medidas en ambos extremos, y que incluye además la etapa de:
3. Método de acuerdo con la reivindicación 1, en el que si ambos valores del ángulo de sincronización d1 y d2 caen dentro del dicho intervalo máximo, el método comprende las etapas adicionales de:
4. Método de acuerdo con la reivindicación 1, en el que si ambos valores del ángulo de sincronización d1 y d2 caen dentro del dicho intervalo máximo, el método comprende las etapas adicionales de:



5. Método de acuerdo con cualquiera de las reivindicaciones precedentes, que comprende además la compensación de las capacidades en derivación, comprendiendo las etapas de:





6. Dispositivo para localización de una falta en una sección de al menos una línea de transmisión y que comprende:











7. Producto de programa de ordenador que comprenden medios de código de ordenador y/o partes de código de software para hacer que un ordenador o procesador realice, cuando dicho código de ordenador y/o medios de código de software se cargan en el ordenador, las etapas de:
8. Producto de programa de ordenador de acuerdo con la reivindicación 7, almacenado en un medio que pueda leer un ordenador.
Patentes similares o relacionadas:
 MÉTODO Y DISPOSITIVO PARA PREDECIR UN ESTADO DE UN SISTEMA ELÉCTRICO DE POTENCIA EN EL DOMINIO TEMPORAL, del 21 de Febrero de 2011, de ABB RESEARCH LTD.: Método para predecir un estado del sistema eléctrico de potencia, que comprende la etapa de realizar una Transformada Rápida de Fourier sobre […]
MÉTODO Y DISPOSITIVO PARA PREDECIR UN ESTADO DE UN SISTEMA ELÉCTRICO DE POTENCIA EN EL DOMINIO TEMPORAL, del 21 de Febrero de 2011, de ABB RESEARCH LTD.: Método para predecir un estado del sistema eléctrico de potencia, que comprende la etapa de realizar una Transformada Rápida de Fourier sobre […]
 PROCEDIMIENTO PARA LOCALIZAR FALLOS EN LÍNEAS ELÉCTRICAS DESCOMPENSADAS CON MEDICIÓN NO SINCRONIZADA EN DOS EXTREMOS, del 7 de Febrero de 2011, de ABB RESEARCH LTD.: Procedimiento para localizar fallos en una sección de por lo menos una línea de transmisión que comprende: - medir la tensión y corrientes en ambos […]
PROCEDIMIENTO PARA LOCALIZAR FALLOS EN LÍNEAS ELÉCTRICAS DESCOMPENSADAS CON MEDICIÓN NO SINCRONIZADA EN DOS EXTREMOS, del 7 de Febrero de 2011, de ABB RESEARCH LTD.: Procedimiento para localizar fallos en una sección de por lo menos una línea de transmisión que comprende: - medir la tensión y corrientes en ambos […]
 METODO Y DISPOSITIVO PARA LA LOCALIZACION DE FALTAS, del 17 de Febrero de 2010, de ABB AB: Método para el cálculo de la distancia a una falta en una sección de una red de transporte de energía eléctrica, sección que se dispone con terminales […]
METODO Y DISPOSITIVO PARA LA LOCALIZACION DE FALTAS, del 17 de Febrero de 2010, de ABB AB: Método para el cálculo de la distancia a una falta en una sección de una red de transporte de energía eléctrica, sección que se dispone con terminales […]
PROCEDIMIENTO PARA AISLAR EL TRAMO AVERIADO UTILIZANDO MEDIDOR DE RIGIDEZ DIELÉCTRICA ADAPTADO, EN REDES DE DISTRIBUCIÓN DE 3ª CATEGORÍA, del 28 de Mayo de 2020, de FERNANDEZ DE HEREDIA ESCOLANO, David: El procedimiento para aislar el tramo averiado en líneas eléctricas de 3ª Categoría, consiste en la utilización de un medidor de rigidez dieléctrica adaptado, en dos […]
SISTEMA Y MÉTODO DE LOCALIZACIÓN DE FALTAS A TIERRA EN INSTALACIONES DE CORRIENTE ALTERNA, del 5 de Mayo de 2020, de UNIVERSIDAD POLITECNICA DE MADRID: Método y sistema de localización de faltas a tierra en instalaciones eléctricas de corriente alterna basados en la medida de las tensiones (Uin) y las […]
Procedimiento para determinar la causa de una falla en una red de suministro de energía eléctrica y aparato de protección para realizar un procedimiento de esa clase, del 8 de Enero de 2020, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para determinar una causa de una falla en una red de suministro de energia electrica (11, 21a, 21b), en el cual - en al menos un punto de medicion […]
SISTEMA Y MÉTODO DE LOCALIZACION DE FALTAS A TIERRA EN CORRIENTE ALTERNA EN SISTEMAS DE CORRIENTE CONTINUA CON INVERSORES, del 30 de Diciembre de 2019, de UNIVERSIDAD POLITECNICA DE MADRID: Invención de un método y sistema de localización de faltas a tierra en corriente alterna en sistemas eléctricos en corriente continua con inversores […]
Dispositivo de medida de una magnitud eléctrica de una fase de una corriente eléctrica alterna de una red eléctrica aérea, del 4 de Diciembre de 2019, de SCHNEIDER ELECTRIC INDUSTRIES SAS: Dispositivo (1; 1') de medida de una magnitud (U) eléctrica de una fase de una primera corriente eléctrica alterna en una red eléctrica aérea, este […]