Unidad de corte y/o de agitación para un robot de cocina.
Robot de cocina (10) para procesar alimentos, comprendiendo el robot de cocina (10):
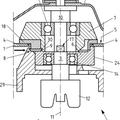
una unidad de accionamiento (12), la cual presenta una unidad de corte y/o de agitación (20) y está montada de manera basculante en una unidad de soporte (14), de manera que la unidad de accionamiento (12), junto con la unidad de corte y/o de agitación (20), pueda ser basculada desde una posición de reposo a una posición de funcionamiento y viceversa; y una sección de conexión (18), la cual está configurada para alojar un recipiente de mezcla (30), de tal manera que la sección de conexión (18) y el recipiente de mezcla (30) definan una cámara de mezcla herméticamente estanca, en la que está dispuesta la unidad de corte y/o de agitación (20); estando en la posición de funcionamiento de la unidad de accionamiento (12) la unidad de corte y/o de agitación (20) dispuesta en la sección inferior de la cámara de mezcla, de tal manera que los alimentos presentes en el recipiente de mezcla (30) son suministrados a la unidad de corte y/o de agitación (20) debido a la fuerza de la gravedad; y comprendiendo la unidad de corte y/o de agitación (20): un disco de agitación (24), esencialmente macizo, el cual puede ser acoplado a través de un árbol (22) con la unidad de accionamiento (12), de manera que el disco de agitación (24) puede ser puesto en rotación por la unidad de accionamiento (12); y por lo menos una cuchilla (25a, 25b, 25c, 25d), la cual está sujeta al disco de agitación (24) y sobresale del disco de agitación (24).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10016235.
Solicitante: SCHLEINZER, WERNER.
Nacionalidad solicitante: Austria.
Dirección: WIENERSTRASSE 42 2361 LAXENBURG AUSTRIA.
Inventor/es: Schleinzer,Werner.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A47J43/07 NECESIDADES CORRIENTES DE LA VIDA. › A47 MOBILIARIO; ARTICULOS O APARATOS DE USO DOMESTICO; MOLINILLOS DE CAFE; MOLINILLOS DE ESPECIAS; ASPIRADORES EN GENERAL. › A47J MATERIAL DE COCINA; MOLINILLOS DE CAFE; MOLINILLOS DE ESPECIAS; APARATOS PARA PREPARAR LAS BEBIDAS. › A47J 43/00 Instrumentos diversos para preparar o recibir alimentos, no previstos en otros grupos de esta subclase. › Elementos o partes constitutivas, p. ej. herramientas para mezclar o para batir.
PDF original: ES-2379860_T3.pdf
Fragmento de la descripción:
Unidad de corte y/o de agitación para un robot de cocina.
Campo de la invención La presente invención se refiere a un dispositivo o robot de cocina para procesar alimentos y en especial para elaborar bebidas de mezcla. La invención se refiere en especial a un robot de cocina para elaborar "Smoothies" realizados a partir de alimentos sólidos o líquidos tales como fruta, verdura o similares.
Objeto de la invención Los Smoothies son bebidas de frutos enteros en las cuales, al contrario que en los jugos de fruta, se procesa por regla general la totalidad del fruto salvo los corazones. La base de un Smoothie es, por consiguiente, la pulpa de la fruta o el puré de la fruta el cual, dependiendo de la receta es mezclado con zumo, con el fin de obtener una consistencia cremosa y espesa. Sin embargo, existen también "Smoothies" en los cuales están contenidos adicionalmente por ejemplo yogur, leche, helado y otros alimentos.
Se conocen robots de cocina para la elaboración de "Smoothies" (ver, documento WO-A-02 38011) . En estos robots de cocina conocidos se encuentran en el extremo inferior de un recipiente de mezcla, en el cual se introducen desde arriba los alimentos que hay que mezclar, una unidad de corte y de agitación con varias cuchillas, la cual puede ser puesta en rotación por un motor, para triturar los alimentos y mezclarlos. En el extremo inferior del recipiente de mezcla se encuentra además una salida que se puede obturar, a través de la cual puede desaguar el producto final líquido, elaborado en el recipiente de mezcla, por ejemplo al interior de un vaso dispuesto debajo de la salida. Un inconveniente de estos dispositivos conocidos consiste en que, por ejemplo, la unidad de corte y agitación es únicamente accesible con dificultad en el recipiente de mezcla, lo cual dificulta la limpieza de este componente.
La presente invención se plantea el problema de proporcionar un robot de cocina mejorado para procesar alimentos y, en especial, para la elaboración de bebidas de mezcla.
Sumario de la invención El problema mencionado con anterioridad se resuelve mediante un robot de cocina según la reivindicación 1. El robot de cocina según la invención consta, esencialmente, de una unidad de accionamiento, la cual está montada de 35 forma basculante en una unidad de soporte, de manera que la unidad de accionamiento puede ser basculada desde una posición de reposo a una posición de funcionamiento y viceversa. El robot de cocina comprende además una unidad de corte y/o de agitación, la cual puede hacerse funcionar mediante la unidad de accionamiento, y una sección de conexión la cual está configurada para alojar de tal manera un recipiente de mezcla que la sección de conexión y el recipiente de mezcla definen una cámara de mezcla herméticamente estanca, en la cual está 40 dispuesta la unidad de corte y/o de agitación o en el cual la unidad de corte y/o de agitación penetra, por lo menos parcialmente. Al mismo tiempo, está dispuesta en la posición de funcionamiento de la unidad de accionamiento la unidad de corte y/o de agitación de tal manera en la sección inferior de la cámara de mezcla, que los alimentos presentes en el recipiente de mezcla son suministrados a la unidad de corte y/o de agitación, debido a la fuerza de la gravedad. La unidad de corte y/o de agitación comprende un árbol para el acoplamiento a una unidad de 45 accionamiento en cuyo extremo está dispuesto un disco de agitación esencialmente macizo. Al disco de agitación están sujetas varias cuchillas de corte, las cuales sobresalen del disco de agitación. El disco de agitación presenta, preferentemente, un diámetro de por lo menos aproximadamente 2 cm.
La sección de conexión está configurada, preferentemente, por una escotadura cilíndrica en la unidad de 50 accionamiento. De manera alternativa la sección de conexión, puede estar configurada preferentemente en forma de una carcasa cilíndrica, y la unidad de corte y/o de agitación a modo de inserto que se puede extraer y volver a introducir en la unidad de accionamiento.
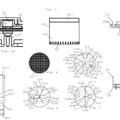
Según una forma de realización preferida, están previstos en el disco de agitación varios orificios semicirculares, 55 empalmando, respectivamente, en el arco circular de un orificio semicircular en el disco de agitación una cúpula en forma de cuarto de esfera. Al mismo tiempo el lado interior de la cúpula en forma de cuarto de esfera y un orificio semicircular forman en cada caso un canal el cual hace posible una comunicación fluídica entre el lado superior y el lado inferior del disco de agitación.
60 Otros perfeccionamientos ventajosos están definidos en las reivindicaciones dependientes.
Breve descripción de los dibujos Las siguientes figuras representan ejemplos preferidos de formas de realización de un robot de cocina para procesar 65 alimentos y en especial para la elaboración de bebidas de mezcla y sirven para explicar la invención.
La figura 1 muestra una vista en perspectiva de un robot de cocina según una forma de realización preferida para procesar alimentos, e inclinada desde arriba, encontrándose la unidad de accionamiento en la posición de reposo.
La figura 2 muestra el robot de cocina de la figura 1, habiendo sido basculada la unidad de accionamiento 180 grados en la posición de funcionamiento.
La figura 3 muestra el robot de cocina de la figura 1, estando colocado un recipiente de mezcla sobre la unidad de accionamiento en la posición de reposo.
La figura 4 muestra el robot de cocina de la figura 3, estando la unidad de accionamiento, con el recipiente de mezcla dispuesto en ella, basculada 180 grados en la posición de funcionamiento de la unidad de accionamiento.
La figura 5 muestra el robot de cocina de la figura 1, estando un recipiente de limpieza dispuesto en la unidad de accionamiento y encontrándose la unidad de accionamiento en la posición de funcionamiento.
Las figuras 6a y 6b muestran respectivamente una vista en detalle de un recipiente de mezcla o de un recipiente de limpieza, los cuales son adecuados para su utilización en un robot de cocina de la figura 1.
La figura 7 muestra una vista en perspectiva de un robot de cocina según otra forma de realización preferida para procesar alimentos, en la cual la unidad de corte y/o de agitación y la sección de conexión están formadas a modo de inserto que se puede extraer de la unidad de accionamiento.
Las figuras 8a a 8d muestran diferentes vistas de una unidad de corte y/o de agitación preferida, la cual es adecuada para la utilización con la unidad de accionamiento del robot de cocina según la invención.
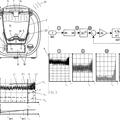
Descripción detallada de formas de realización preferidas La figura 1 muestra un robot de cocina 10 según una forma de realización preferida para procesar alimentos y, en especial, para la elaboración de bebidas de mezcla a partir de alimentos sólidos o líquidos, como zumo, leche, yogur, fruta, verdura o similares. El robot de cocina 10 comprende una unidad de accionamiento 12, la cual es sujetada con posibilidad de basculación, por una unidad de soporte 14. En la forma de realización preferida representada en la figura 1, la unidad de soporte 14 consiste en un pie de apoyo o base 15 y dos brazos de soporte 16a, 16b, estando montada la unidad de accionamiento 12 en los dos extremos superiores de los dos brazos de soporte 16a, 16b, de forma que se puede hacer bascular entre ambos. En el lado inferior del pie de apoyo 15 pueden estar previstas ventosas 17, para garantizar una posición fija del robot de cocina 10 sobre una base plana, por ejemplo una superficie de trabajo de la cocina o una mesa de cocina. Evidentemente la unidad de soporte 14 puede presentar, en lugar de dos brazos de soporte 16a, 16b, también únicamente un brazo de soporte, en el cual está montada la unidad de accionamiento 12 de forma adecuada.
La unidad de accionamiento 12 presenta en la forma de realización preferida, representada en las figuras, esencialmente la forma de una esfera. Como se ha mencionado con anterioridad, la unidad de accionamiento 12 está montada de manera basculante (ver también la figura 3 y la figura 4) , para la rotación alrededor de un eje de rotación A, entre dos brazos de soporte 16a, 16b. Dicho con otras palabras: la unidad de accionamiento 12 puede bascular desde una posición de reposo, la cual está representada por ejemplo en la figura 1, 180 grados a una posición de funcionamiento, la cual está representada por ejemplo en la figura 2. Esta basculación de la unidad... [Seguir leyendo]
Reivindicaciones:
1. Robot de cocina (10) para procesar alimentos, comprendiendo el robot de cocina (10) :
una unidad de accionamiento (12) , la cual presenta una unidad de corte y/o de agitación (20) y está montada de manera basculante en una unidad de soporte (14) , de manera que la unidad de accionamiento (12) , junto con la unidad de corte y/o de agitación (20) , pueda ser basculada desde una posición de reposo a una posición de funcionamiento y viceversa; y una sección de conexión (18) , la cual está configurada para alojar un recipiente de mezcla (30) , de tal manera que la sección de conexión (18) y el recipiente de mezcla (30) definan una cámara de mezcla herméticamente estanca, en la que está dispuesta la unidad de corte y/o de agitación (20) ;
estando en la posición de funcionamiento de la unidad de accionamiento (12) la unidad de corte y/o de agitación (20) dispuesta en la sección inferior de la cámara de mezcla, de tal manera que los alimentos presentes en el recipiente de mezcla (30) son suministrados a la unidad de corte y/o de agitación (20) debido a la fuerza de la gravedad; y comprendiendo la unidad de corte y/o de agitación (20) :
un disco de agitación (24) , esencialmente macizo, el cual puede ser acoplado a través de un árbol (22) con la unidad de accionamiento (12) , de manera que el disco de agitación (24) puede ser puesto en rotación por la unidad de accionamiento (12) ; y por lo menos una cuchilla (25a, 25b, 25c, 25d) , la cual está sujeta al disco de agitación (24) y sobresale del disco de agitación (24) .
2. Robot de cocina (10) según la reivindicación 1 en el que por lo menos un orificio semicircular está previsto en el disco de agitación (24) y en el arco circular del orificio semicircular está colocada una cúpula (26a, 26b, 26c, 26d) en forma de cuarto de esfera, de manera que el lado interior de la cúpula en forma de cuarto de esfera y un orificio semicircular forman un canal, el cual permite una comunicación fluídica entre el lado superior y el lado inferior del disco de agitación (24) .
3. Robot de cocina (10) según la reivindicación 1, en el que el diámetro del disco de agitación (24) es de por lo menos aproximadamente 2 cm, preferentemente de por lo menos aproximadamente 3 cm.
4. Robot de cocina (10) según la reivindicación 2 o la reivindicación 3, en el que la unidad de corte y de agitación
(20) comprende cuatro cuchillas (25a, 25b, 25c, 25d) y cuatro orificios semicirculares con cinco cúpulas (26a, 26b, 26c, 26d) en forma de cuarto de esfera que se abovedan sobre los orificios.
5. Robot de cocina (10) según la reivindicación 1, en el que la unidad de soporte (14) comprende un pie de apoyo (15) y dos brazos de soporte (16a, 16b) para el montaje basculante de la unidad de accionamiento (12) .
6. Robot de cocina (10) según la reivindicación 1, en el que la sección de conexión (18) está formada por una escotadura cilíndrica en la unidad de accionamiento (12) .
7. Robot de cocina (10) según la reivindicación 1, en el que la sección de conexión (18) está configurada preferentemente en forma de una carcasa cilíndrica, y la unidad de corte y/o de agitación (20) está configurada a modo de inserto que se puede extraer de la unidad de accionamiento (12) y volver a introducir en la misma.
8. Robot de cocina (10) según la reivindicación 6 ó 7, en el que en el lado interior del perímetro de la sección de conexión (18) están previstas varias ranuras de introducción (19a, 19b) , las cuales están configuradas para alojar unas espigas (32a, 32b, 32c) de un recipiente de mezcla (30) formadas de manera complementaria.
9. Robot de cocina (10) según la reivindicación 8, en el que las ranuras de introducción (19a, 19b) se transforman, respectivamente, en una sección de ranura que se extiende perimetralmente una pequeña distancia, estrechándose, respectivamente, una sección de ranura a medida que aumenta la distancia con respecto a la ranura de introducción (19a, 19b) que está conectada con la misma, de manera que al introducir la espiga (32a, 32b, 32c) de un recipiente de mezcla (30) en las secciones de ranura de las ranuras de introducción (19a, 19b) el recipiente de mezcla (30) es comprimido contra el fondo de la sección de conexión (18) .
10. Robot de cocina (10) según la reivindicación 9, en el que por lo menos un conmutador de seguridad sometido a pretensión penetra en la sección de ranura de una de las ranuras de introducción (19a, 19b) , de manera que en esta posición desplegada del conmutador de seguridad se interrumpe la alimentación con corriente de la unidad de accionamiento (12) y, cuando se lleva al recipiente de mezcla (30) a un engrane estanco a los fluidos con la unidad de accionamiento (12) , una espiga (32a, 32b, 32c) del recipiente de mezcla (30) , introducida en la sección de ranura presiona el conmutador de seguridad contra la pretensión en una posición introducida, en la cual la interrupción de la
alimentación con corriente de la unidad de accionamiento (12) ha sido eliminada.
11. Robot de cocina (10) según la reivindicación 1, en el que el robot de cocina (10) está configurado de tal manera
que la basculación de la unidad de accionamiento (12) junto con la unidad de corte y/o de agitación (20) , desde la 5 posición de reposo a la posición de funcionamiento, tiene lugar girando un ángulo de 180 grados.
12. Robot de cocina (10) según la reivindicación 1, en el que el robot de cocina comprende asimismo un conmutador de enclavamiento (40) para la alimentación con corriente de la unidad de accionamiento (12) , el cual está dispuesto y configurado de tal manera que en la posición de reposo de la unidad de accionamiento (12) se encuentra en una posición enclavada, en la cual la alimentación con corriente de la unidad de accionamiento (12) es interrumpida por el conmutador de enclavamiento (40) , y durante la basculación de la unidad de accionamiento (12) en la posición de funcionamiento, se desenclava debido a una pretensión y alimenta la unidad de accionamiento (12) con una corriente para la rotación de la unidad de corte y/o de agitación (20) .
Patentes similares o relacionadas:
 Dispositivo de preparación de alimentos con herramienta separable, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Dispositivo de preparación de alimentos con un recipiente de preparación de alimentos y una herramienta giratoria para picar y/o mezclar […]
Dispositivo de preparación de alimentos con herramienta separable, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Dispositivo de preparación de alimentos con un recipiente de preparación de alimentos y una herramienta giratoria para picar y/o mezclar […]
 Procesador de alimentos con soporte de impulsor de baja fricción, del 29 de Julio de 2020, de SOCIETE DES PRODUITS NESTLE S.A.: Una máquina para homogeneizar una sustancia alimenticia, como espuma de leche o una sustancia a base de leche, como una máquina independiente o como una máquina […]
Procesador de alimentos con soporte de impulsor de baja fricción, del 29 de Julio de 2020, de SOCIETE DES PRODUITS NESTLE S.A.: Una máquina para homogeneizar una sustancia alimenticia, como espuma de leche o una sustancia a base de leche, como una máquina independiente o como una máquina […]
 Aparato de preparación de alimentos con detección de sobrepresión, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato de preparación de alimentos con un recipiente de preparación de alimentos , un elemento de calentamiento para calentar un alimento en el recipiente de […]
Aparato de preparación de alimentos con detección de sobrepresión, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato de preparación de alimentos con un recipiente de preparación de alimentos , un elemento de calentamiento para calentar un alimento en el recipiente de […]
Accesorio de procesamiento con protección de manipulación, del 15 de Julio de 2020, de BSH HAUSGERÁTE GMBH: Accesorio de procesamiento para procesar alimentos para su uso con un procesador de alimentos, que presenta un elemento de formación de tapa […]
Máquina de cocina accionada por motor eléctrico, así como vaso de batido y mecanismo batidor para ella, del 15 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Vaso de batido para una máquina de cocina accionada por motor eléctrico, que comprende un fondo del vaso que presenta una abertura […]
Aparato de cocina accionado por electricidad, del 17 de Junio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato de cocina accionado por electricidad, en particular aparato de mezcla y cocción, para la preparación de un producto de cocción, que presenta […]
SISTEMA DE COCCIÓN, del 15 de Junio de 2020, de BSH ELECTRODOMESTICOS ESPAÑA S.A.: Sistema de cocción. La presente invención hace referencia a un sistema de cocción, en particular, a un sistema de cocción por inducción, con al menos una unidad […]
Aparato doméstico para la preparación de alimentos y procedimiento para accionar un aparato doméstico de este tipo, del 10 de Junio de 2020, de BSH HAUSGERÁTE GMBH: Aparato doméstico para preparar alimentos, el cual presenta al menos una unidad de calentamiento mediante la cual es generable calor […]