SOPORTE PARA DISRRUPTOR ADAPTADO A UNA PINZA DE UN BRAZO ROBOTIZADO.
1. Soporte para disrruptor adaptado a una pinza de un brazo robotizado,
estando basado el disrruptor en un tubo o cañón en cuya recámara aloja un cartucho pirotécnico propelente y cuyo tubo o cañón se rellena de agua o mezcla de agua y anticongelante, con objeto de que mediante su disparo contra un material explosivo se evite su detonación, siendo fijados a un lateral de un brazo articulado de un robot de utilidad en la detección, manipulación y desarticulación de artefactos explosivos, caracterizado porque el soporte (2) para disrruptor (3) se fija a la cara externa de las hojas de una pinza (1) en la que se remata el brazo articulado de un robot, presentando una forma general anular acogiendo, en posición centrada, al disrruptor (3), que por uno de sus lados incorpora un medio (4) anti-retroceso y por su otro lado incorpora un medio (5) anti-retorno, que le mantienen en posición estática de equilibrio, y estando provisto el soporte (2) anular de un saliente radial (6) en su parte distal, que acoge un elemento óptico o una minicámara de video (7).
2. Soporte para disrruptor adaptado a una pinza de un brazo robotizado, según la 1ª reivindicación, caracterizado porque el extremo más externo del disrruptor (3) queda en proximidad al extremo libre de la pinza (1).
3. Soporte para disrruptor adaptado a una pinza de un brazo robotizado, según la 1ª reivindicación, caracterizado porque el elemento óptico o minicámara de video (7) incorporado en el soporte (2) de forma general anular se asocia al eje axial del disrruptor (3) en su disparo.
4. Soporte para disrruptor adaptado a una pinza de un brazo robotizado, según la 1ª reivindicación, caracterizado porque el medio (4) antiretroceso del disrruptor (3) actúa en el momento del disparo del mismo y el medio (5) anti-retorno actúa, tras el retroceso, en la vuelta del dirruptor (3) a su posición de reposo.
5. Soporte para disrruptor adaptado a una pinza de un brazo robotizado, según las reivindicaciones 1ª y 4ª, caracterizado porque los medios (4 y 5) anti-retroceso y anti-retorno se basan en correspondientes resortes.
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201431498.
Solicitante: PROYTECSA SECURITY, S.L.
Nacionalidad solicitante: España.
Inventor/es: SALLEN ROSELLO,CESAR.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F42D5/04 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F42 MUNICIONES; VOLADURA. › F42D VOLADURA (mechas, p. ej. cordones de mecha C06C 5/00; cartuchos de voladura F42B 3/00). › F42D 5/00 Dispositivos de seguridad. › Para hacer inofensivas las cargas explosivas, p. ej. para destruir municiones (extracción de cebos, desmontaje de municiones F42B 33/04, F42B 33/06 ); para hacer inofensiva la detonación de cargas explosivas.
Fragmento de la descripción:
Soporte para disrruptor adaptado a una pinza de un brazo robotizado.
OBJETO DE LA INVENCIÓN 5
El siguiente Modelo de Utilidad, según se expresa en el enunciado de la presente memoria descriptiva, se refiere a un soporte para disrruptor adaptado a una pinza de un brazo robotizado, teniendo por objeto facilitar la desarticulación de artefactos explosivos mediante un disrruptor, impidiendo su activación, y el cual se basa en un tubo o cañón con una 10 recámara en la que se aloja un cartucho pirotécnico propelente y cuyo tubo o cañón se rellena con agua o mezcla de agua y anticongelante, de forma que al colocarlo a escasa distancia del artefacto explosivo y disparar, el agua depositada en el tubo o cañón, a gran velocidad, es micronizada o casi vaporizada, incrustándose con el explosivo y separándolo del artefacto, sin tiempo a que éste llegue a detonar. 15
CAMPO DE APLICACIÓN
En la presente memoria se describe un soporte para disrruptor adaptado a una pinza de un brazo robotizado, el cual es de aplicación para su montaje en las hojas de las pinzas en las 20 que se remata el brazo articulado de un robot y, especialmente, para aquellos robots destinados a la detección, manipulación y desactivación de artefactos explosivos.
ANTECEDENTES DE LA INVENCIÓN
Convencionalmente, los disrruptores se colocan en un lateral del brazo articulado de un robot, pero presentan una serie de inconvenientes, tales como:
ï la punta del tubo o cañón debe ser casi la parte más saliente del brazo del robot;
ï hay que acercar mucho la boca del tubo o cañón al explosivo; 30
ï el impacto que recibe la estructura del robot no es despreciable dado que la carga propelente y la masa expulsada es considerable, teniendo un gran retroceso, equiparable al de un rifle de caza mayor o fusil militar;
ï proyectan parte de la masa hacia atrás, produciendo un efecto anti-retroceso al equilibras las fuerzas de reacción de la masa expulsada, por lo que hay que tener 35 un debido cuidado de lo que está detrás del tubo o cañón;
ï en algunos casos, el tubo o cañón esta suelto en su soporte y cuando se dispara, el propio tubo o cañón sale despedido hacia atrás algunos metros, de manera que la estructura del robot se libera del impacto del retroceso del tubo o cañón, y;
ï el tubo o cañón puede interferir con la pinza manipuladora. 40
DESCRIPCIÓN DE LA INVENCIÓN
En la presente memoria se describe un soporte para disrruptor adaptado a una pinza de un brazo robotizado, estando basado el disrruptor en un tubo o cañón en cuya recámara aloja 45 un cartucho pirotécnico propelente y cuyo tubo o cañón se rellena de agua o mezcla de agua y anticongelante, con objeto de que mediante su disparo, contra un material explosivo, se evite su detonación, siendo fijados a un lateral de un brazo de un robot de utilidad en la detección, manipulación y desarticulación de artefactos explosivos.
En base a dicha configuración se trata de fijar el soporte para disrruptor a la cara externa de las hojas de la pinza en la que se remata el brazo del robot, de forma que el soporte presenta una forma general anular acogiendo, en posición centrada, al disrruptor, que por uno de sus lados incorpora un medio anti-retroceso y por su otro lado incorpora un medio anti-retorno, que le mantienen en posición estática de equilibrio, y estando provisto el soporte anular de un saliente radial en su parte distal, que acoge un elemento óptico o una cámara de video. 5
Por otra parte, el extremo más externo del disrruptor debe quedar lo más próximo posible al extremo libre de la pinza, pero que, por otro lado, no impida el normal uso de la propia pinza, de manera que la pinza pueda portar el disrruptor listo para ser disparado cuando fuese necesario. 10
El elemento óptico o cámara de video incorporado en el soporte de forma general anular se asocia al eje axial del disrruptor en su disparo, con objeto de centrar el disparo sobre el material explosivo.
Además, aún cuando el robusto brazo articulado del robot no precise dispositivo alguno anti-retroceso, está previsto que disponga de un medio anti-retroceso del disrruptor el cual actúa en el momento del disparo del mismo y, asimismo, también incorpora un medio anti-retorno que actúa, tras el retroceso, en la vuelta del dirruptor a su posición de reposo.
Dichos medios anti-retroceso y anti-retorno se basan en correspondientes resortes.
Para complementar la descripción que seguidamente se va a realizar, y con objeto de ayudar a una mejor comprensión de las características de la invención, se acompaña a la presente memoria descriptiva, de un juego de planos, en cuyas figuras de forma ilustrativa y 25 no limitativa, se representan los detalles más característicos de la invención.
BREVE DESCRIPCIÓN DE LOS DISEÑOS
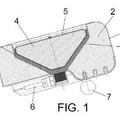
Figura 1. Muestra una primera vista de una pinza que estará unida al extremo libre de un 30 brazo articulado de un robot destinado a la detección y manipulación de artefactos explosivos, y que incorpora, en ambas hojas, un soporte de montaje de un disrruptor.
Figura 2. Muestra una segunda vista de una pinza que estará unida al extremo libre de un brazo articulado de un robot destinado a la detección y manipulación de artefactos 35 explosivos, y que incorpora, en ambas hojas, un soporte de montaje de un disrruptor.
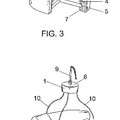
Figura 3. Muestra una vista en perspectiva de una hoja de una pinza de montaje en el extremo libre de un brazo articulado de un robot destinado a la detección y manipulación de artefactos explosivos, pudiendo observar como a la citada hoja se ha fijado un soporte de 40 forma general anular con un saliente radial en su parte distal para el montaje de un disrruptor.
Figura 4. Muestra una vista en perspectiva de una hoja de una pinza de montaje en el extremo libre de un brazo articulado de un robot destinado a la detección y manipulación de 45 artefactos explosivos, pudiendo observar como a la misma se ha fijado un soporte de forma general anular en el que se ha montado un disrruptor según una variante de ejecución practica.
DESCRIPCIÓN DE UNA REALIZACIÓN PREFERENTE 50
A la vista de las comentadas figuras y de acuerdo con la numeración adoptada podemos observar como a la pinza 1 en la que se remata el brazo articulado de un robot de utilidad en la detección, manipulación y desarticulación de artefactos explosivos se ha incorporado, por la cara externa de ambas hojas, un soporte 2 para disrruptor 3 cuyo soporte 2 presenta una forma general anular que, en posición centrada, acoge al disrruptor 3, que por uno de sus lados incorpora un medio anti-retroceso 4 y por su otro lado incorpora un medio anti-5 retorno 5, que le mantienen en posición estática de equilibrio, y estando provisto el soporte 2 anular de un saliente radial 6 en su parte distal, que acoge un elemento óptico o una cámara de video 7.
En las figuras 1 y 2 puede observarse como el disrruptor 3 queda en proximidad al extremo 10 libre de la pinza 1 pero sin interferir para el normal uso de la misma, de forma que la pinza 1 podrá llevar el disrruptor listo para poder ser utilizado cuando proceda.
Además, el soporte 2 presenta un saliente radial 6, en posición distal, en el que se aloja un elemento óptico o cámara de video 7, de forma que una vez detectado un artefacto 15 explosivo se acercará a escasa distancia, alguno centímetros, del material explosivo, tal como se observa en las figuras 1 y 2, preferentemente, cerca del detonador, si se localiza, y se dispara el disrruptor 3.
Mediante el elemento óptico o cámara de video 7 se alinearán los disrruptores 3 hacia el 20 detonador y al disparar el agua, a extrema velocidad, es micronizada o casi evaporada, incrustándose con el explosivo y separándolo del artefacto, sin tiempo a que este llegue a detonar.
Así, mediante los elementos ópticos se permite alinear los disrruptores con el objetivo, de 25 forma que si se trata de un puntero láser marcará el punto de impacto del líquido proyectado, y si se trata de una minicámara de video se hará que el centro de la imagen coincida con el punto de impacto, en la pantalla del operador.
Asimismo, el disrruptor 3 esta solicitado por un medio 4 anti-retroceso, definido por un 30 resorte, y por un medio 5 anti-retorno, definido, igualmente, por un resorte, de forma que al efectuar el disparo el medio 4 actúa de freno anti-retroceso del disrruptor y el medio 5 actúa de freno anti-retorno al volver el disrruptor 3 a su posición estable de reposo.
De esta forma, el soporte para disrruptor objeto de la invención podrá ser adaptado a 35 aquellos robots de la firma solicitante que interese que, al disponer...
Reivindicaciones:
1ª. SOPORTE PARA DISRRUPTOR ADAPTADO A UNA PINZA DE UN BRAZO ROBOTIZADO, estando basado el disrruptor en un tubo o cañón en cuya recámara aloja un cartucho pirotécnico propelente y cuyo tubo o cañón se rellena de agua o mezcla de agua y 5 anticongelante, con objeto de que mediante su disparo contra un material explosivo se evite su detonación, siendo fijados a un lateral de un brazo articulado de un robot de utilidad en la detección, manipulación y desarticulación de artefactos explosivos, caracterizado por que el soporte (2) para disrruptor (3) se fija a la cara externa de las hojas de una pinza (1) en la que se remata el brazo articulado de un robot, presentando una forma general anular 10 acogiendo, en posición centrada, al disrruptor (3) , que por uno de sus lados incorpora un medio (4) anti-retroceso y por su otro lado incorpora un medio (5) anti-retorno, que le mantienen en posición estática de equilibrio, y estando provisto el soporte (2) anular de un saliente radial (6) en su parte distal, que acoge un elemento óptico o una minicámara de video (7) . 15
2ª. SOPORTE PARA DISRRUPTOR ADAPTADO A UNA PINZA DE UN BRAZO ROBOTIZADO, según la 1ª reivindicación, caracterizado por que el extremo más externo del disrruptor (3) queda en proximidad al extremo libre de la pinza (1) .
3ª. SOPORTE PARA DISRRUPTOR ADAPTADO A UNA PINZA DE UN BRAZO ROBOTIZADO, según la 1ª reivindicación, caracterizado por que el elemento óptico o minicámara de video (7) incorporado en el soporte (2) de forma general anular se asocia al eje axial del disrruptor (3) en su disparo.
4ª. SOPORTE PARA DISRRUPTOR ADAPTADO A UNA PINZA DE UN BRAZO ROBOTIZADO, según la 1ª reivindicación, caracterizado por que el medio (4) anti-retroceso del disrruptor (3) actúa en el momento del disparo del mismo y el medio (5) anti-retorno actúa, tras el retroceso, en la vuelta del dirruptor (3) a su posición de reposo.
5ª. SOPORTE PARA DISRRUPTOR ADAPTADO A UNA PINZA DE UN BRAZO ROBOTIZADO, según las reivindicaciones 1ª y 4ª, caracterizado por que los medios (4 y 5) anti-retroceso y anti-retorno se basan en correspondientes resortes.
Patentes similares o relacionadas:
Método y montaje para posicionar y alinear un disruptor para desmantelar un objetivo, del 4 de Diciembre de 2019, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Procedimiento de posicionamiento y de alineación de un disruptor destinado al desmantelamiento de un objetivo y que comprende un eje de tiro, una dirección de tiro […]
Dispositivo de flotación marítima, del 10 de Julio de 2019, de Mas Zengrange (NZ) Limited: Un dispositivo de flotación marítima (MFD) para usar dispositivos de disparo remoto (RFD) por encima y por debajo de la línea de flotación por medio de iniciación […]
Método para combatir unidades de armamento cargadas con explosivo, y proyectil diseñado para el mismo, del 18 de Abril de 2018, de BAE SYSTEMS BOFORS AB: Método de combatir, con un proyectil que comprende una carga reactiva, una unidad de armamento cargada con explosivo, de modo que se minimizan efectos perjudiciales […]
Cámara de simulación, así como procedimiento para la activación controlada de cargas explosivas contenidas en mercancías, del 2 de Agosto de 2017, de Nautilus Softwaredesign, Vertreten Durch Ihren Inhaber, Michael Böck: Cámara de simulación para la activación controlada de cargas explosivas contenidas en una mercancía en condiciones simuladas, con una cámara de […]
 Conjunto de detonador inalámbrico, y métodos de voladura, del 27 de Septiembre de 2013, de ORICA EXPLOSIVES TECHNOLOGY PTY LTD: Conjunto de detonador inalámbrico para su uso en relación con una máquina de voladura que transmite almenos una señal de orden inalámbrica al conjunto de […]
Conjunto de detonador inalámbrico, y métodos de voladura, del 27 de Septiembre de 2013, de ORICA EXPLOSIVES TECHNOLOGY PTY LTD: Conjunto de detonador inalámbrico para su uso en relación con una máquina de voladura que transmite almenos una señal de orden inalámbrica al conjunto de […]
 DISPOSITIVO PARA LA DESTRUCCION POR GOLPEO DE ARTEFACTOS EXPLOSIVOS Y SIMILARES, del 13 de Noviembre de 2012, de SANTA BARBARA SISTEMAS, S.A: Dispositivo para la destrucción por golpeo de artefactos explosivos y similares que consiste en una cazoleta de plástico que alberga en su interior una pequeña […]
DISPOSITIVO PARA LA DESTRUCCION POR GOLPEO DE ARTEFACTOS EXPLOSIVOS Y SIMILARES, del 13 de Noviembre de 2012, de SANTA BARBARA SISTEMAS, S.A: Dispositivo para la destrucción por golpeo de artefactos explosivos y similares que consiste en una cazoleta de plástico que alberga en su interior una pequeña […]
 CARGA EXPLOSIVA DE PROYECCION LIQUIDA, del 13 de Septiembre de 2012, de SANTA BARBARA SISTEMAS, S.A: Carga explosiva de proyección líquida.
La carga explosiva se basa en una pareja de depósitos (1 y 1'), estando el depósito (1') contenido en el interior del depósito […]
CARGA EXPLOSIVA DE PROYECCION LIQUIDA, del 13 de Septiembre de 2012, de SANTA BARBARA SISTEMAS, S.A: Carga explosiva de proyección líquida.
La carga explosiva se basa en una pareja de depósitos (1 y 1'), estando el depósito (1') contenido en el interior del depósito […]
 ROBOT TELECOMANDO PARA OPERACIONES ESPECIALES, del 6 de Mayo de 2011, de PROYECTOS Y TECNOLOGIA SALLEN, S.L.: 1. Robot telecomandado para operaciones especiales, siendo del tipo de robots utilizados para llevar a cabo operaciones de riesgo, tales como la manipulación de explosivos, […]
ROBOT TELECOMANDO PARA OPERACIONES ESPECIALES, del 6 de Mayo de 2011, de PROYECTOS Y TECNOLOGIA SALLEN, S.L.: 1. Robot telecomandado para operaciones especiales, siendo del tipo de robots utilizados para llevar a cabo operaciones de riesgo, tales como la manipulación de explosivos, […]