Robot para manipulación de artefactos sospechosos.
Robot para manipulación de artefactos sospechosos, siendo del tipo robots provistos de unos medios móviles de tracción,
de especial aplicación, dadas sus reducidas dimensiones, para acceder a espacios reducidos, tales como el interior de autobuses, trenes y aviones, pudiendo inspeccionar, manipular y desactivar artefactos explosivos, incorporando en la superficie superior del cuerpo de tanqueta una base de giro con un sensor de carga y disponiendo de cuatro medios móviles de tracción, flippers, dos a cada lado del cuerpo de tanqueta, accionados por respectivos motores con correspondientes encoders, controlando la posición, velocidad y par, de forma independiente, y con una correa de tracción para cada medio móvil, accionadas por una pareja de motores para su transmisión dos a dos, y, unos sensores inerciales, así como unos sensores de inclinación que junto con el control independiente de los flippers, mantienen el cuerpo de tanqueta en posición horizontal o en posición inclinada, en función de las necesidades.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201530861.
Solicitante: PROYTECSA SECURITY, S.L.
Nacionalidad solicitante: España.
Inventor/es: SALLEN ROSELLO,CESAR, TORRES PUEO,ROBERTO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J5/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores montados sobre ruedas o sobre soportes móviles (B25J 1/00 tiene prioridad; manipuladores de control programado B25J 9/00).
- B62D55/065 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 55/00 Vehículos de orugas (bajo el aspecto de la dirección B62D 11/00). › Vehículos con orugas múltiples, es decir, con más de dos orugas.
- F41H11/16 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F41 ARMAS. › F41H BLINDAJE; TORRETAS ACORAZADAS; VEHICULOS BLINDADOS O ARMADOS; MEDIOS DE ATAQUE O DE DEFENSA, p. ej. ENMASCARAMIENTO, EN GENERAL. › F41H 11/00 Instalaciones de defensa; Mecanismos de defensa (aspectos constructivos, ver sección E, p. ej. E04H 9/04 ); Medios para limpiar o detectar minas terrestres. › Vehículos de limpieza de minas autopropulsados; Dispositivos de limpieza de minas que se unen a vehículos.
Fragmento de la descripción:
Robot para manipulación de artefactos sospechosos.
OBJETO DE LA INVENCIÓN.
La siguiente invención, según se expresa en el enunciado de la presente memoria descriptiva, se refiere a un robot para manipulación de artefactos sospechosos, siendo del tipo robots provistos de cuatro medios móviles de tracción (flippers) con correspondientes correas, teniendo como objetivo esencial, dadas sus reducidas dimensiones, poder acceder a espacios reducidos, tales como el interior de autobuses, trenes y aviones, pudiendo inspeccionar, manipular y en su caso desactivar artefactos explosivos.
Así, las dimensiones del robot vienen determinadas por las reducidas medidas de los espacios por los que debe de desplazarse y maniobrar, e, igualmente, debe de ser capaz de acceder a los mismos, por lo que debe de ser capaz de subir/bajar escaleras.
Además, un segundo objeto de la invención es que el robot mantenga siempre que sea preciso el cuerpo en posición horizontal, eliminando las oscilaciones provocadas por un terreno irregular, para lo que dispone de unos sensores de inclinación integrados en el cuerpo y un control de los flippers independiente.
Asimismo, un tercer objeto de la invención es que el robot sea capaz de desplazar su centro de gravedad, inclinando el cuerpo por medio de los flippers, hacia el lado contrario de trabajo del brazo, mejorando la capacidad de carga lateral.
Un cuarto objetivo del robot es que sea capaz de ponerse "de pié" para acceder a lugares de mayor altura, tales como pueden ser los porta paquetes de ubicación de las maletas y similares, para inspeccionar, manipular y recoger objetos sospechosos.
CAMPO DE APLICACIÓN.
En la presente memoria se describe un robot para manipulación de artefactos sospechosos explosivos, el cual es de especial aplicación, dadas sus reducidas dimensiones, para llevar a cabo trabajos en espacios reducidos, tales como en el interior de autobuses, trenes y aviones.
ANTECEDENTES DE LA INVENCIÓN.
Como es conocido, cuando hay que manipular artefactos explosivos o realizar operaciones de riesgo, más aún, cuando están en riesgo vidas humanas, se utilizan robots que son manejados a distancia por medio de una consola de control.
Por otra parte, de acuerdo a la aplicación y uso del robot, sus características se adaptan a ellas pudiendo variar tanto su tamaño como las características de diseño, y, así, cuando se trate de ser utilizado en la vigilancia perimetral en infraestructuras críticas como centrales petroquímicas y nucleares, así como en grandes industrias, se trata de dotar al robot de una extraordinaria envergadura y alcance permitiendo el acceso y manipulación de artefactos detectados al otro lado del perímetro a vigilar, así como una cierta agilidad en su desplazamiento.
En otros casos el objetivo es diferente, y, así, en el documento ES 2 241 490 se describe un "robot autopropulsado para manipulación de cargas explosivas", el cual presenta un tren de rodadura de oruga regulable en anchura que facilita su desplazamiento por terrenos agrestes e incorpora un brazo articulado con un primer tramo en forma de horquilla que facilita el plegado del extremo libre dotado de una pinza entre dicho primer tramo en forma de horquilla y cuyo robot incorpora una pala, regulable en anchura, de arrastre.
Asimismo, podemos considerar el documento de patente P20431720 en el que se describe un "vehículo robotizado telecomandado", el cual comprende dos juegos de ruedas, uno a cada lateral, de tres ruedas cada uno de ellos, accionado cada juego de ruedas por correspondientes motores; dos juegos de oruga, uno a cada lado por el interior de los juegos de ruedas, a un ras ligeramente superior a los juegos de ruedas; un primer brazo articulado de acción hidráulica montado, a través de unos medios de doble articulación, sobre una torreta giratoria 360º por el eje central y un segundo brazo articulado de accionamiento eléctrico y giratoria respecto de un eje vertical de montaje, estando controlado a distancia, de forma que mediante los dos brazos se permite sujetar con un brazo un objeto y con el otro brazo poder examinarlo.
Finalmente, podemos considerar el documento ES 2 229 938 en el que se describe un "robot autopropulsado para manipulación de artefactos explosivos", el cual comprende una pareja de motores independientes transmitiendo el movimiento a respectivos trenes de rodadura lateral y un brazo articulado definido por cuatro tramos y una pinza extrema dotada de movimiento giratorio específico, estando montado el brazo articulado en una torre dotada de movimiento giratorio, respecto de un plano horizontal, cuyo robot con sus potentes tenazas permiten acceder al maletero, al capó o al interior de un vehículo deformando el metal o atravesando los cristales con rapidez y eficacia y cuyo brazo hidráulico puede elevar pesos de hasta 250 kg, suficiente para mover un vehículo de tamaño mediano o retirar un artefacto de elevado peso del interior de un vehículo.
DESCRIPCIÓN DE LA INVENCIÓN.
En la presente memoria se describe un robot para manipulación de artefactos sospechosos, el cual, ante los diferentes tipos de robots considerados, presenta como importante característica las dimensiones del mismo que le hacen óptimo para su utilización en medios de transporte, tales como autobuses, trenes y aviones, con objeto de poder acceder a su interior y llevar a cabo las oportunas operaciones de manipulación de objetos sospechosos, al poder maniobrar por los estrechos pasillos de los mismos.
Así, el robot objeto de la invención es del tipo de robots provistos de unos medios móviles de tracción con correspondientes correas, de forma que el robot comprende:
en la superficie superior del cuerpo de tanqueta, una base de giro con un sensor de carga;
cuatro medios móviles de tracción, flippers, dos a cada lado del cuerpo de tanqueta, accionados por respectivos primeros motores con correspondientes encoders, controlando la posición, velocidad y par, de forma independiente;
una correa de tracción para cada medio móvil de tracción, accionadas por una pareja de segundos motores, uno a cada lateral, para su transmisión dos a dos a los flippers;
unos sensores inerciales integrados en el cuerpo de tanqueta, y;
unos sensores de inclinación que junto con el control independiente de los flippers, mantienen el cuerpo de tanqueta en posición horizontal o en posición inclinada, en función de las necesidades,
de forma que, dadas las reducidas dimensiones del robot, así como su desplazamiento por terrenos irregulares y la posibilidad de subir/bajar escaleras, accede a diferentes medios de transporte como autobuses, trenes y aviones, desplazándose y maniobrando por los pasillos de los mismos lo hacen un robot de un gran relevancia al permitir inspeccionar dichos medios de transporte en los que cada día es más importante tener un control de seguridad de los mismos.
La base de giro, dispuesta en la superficie superior del cuerpo de tanqueta, monta un brazo o herramienta y mediante el sensor de carga se controlan que las operaciones llevadas a cabo, para trabajar con seguridad.
Por otra parte, los motores de accionamiento independiente de cada uno de los flippers, permiten tener el control de la posición, velocidad y par de cada uno de ellos y, además, mediante ellos se permite llevar a cabo las diversa maniobras, independientes de cada fliper, como subir/bajar escaleras.
Asimismo, la transmisión a las correas de los flippers se lleva a cabo por una pareja de motores, uno a cada lateral, que transmiten el movimiento dos a dos a los flipers.
Además, el robot es capaz de ponerse de pié sobre los flippers posteriores, permitiendo que pueda acceder a lugares elevados como puede ser los portaequipajes de los medios de transporte en los que trabaje.
Para complementar la descripción que seguidamente se va a realizar, y con objeto de ayudar a una mejor comprensión de las características de la invención, se acompaña a la presente memoria descriptiva, de un juego de planos, en cuyas figuras de forma ilustrativa y no limitativa, se representan los detalles más característicos de la invención.
BREVE DESCRIPCIÓN DE LOS DISEÑOS.
Figura 1. Muestra una vista en perspectiva del robot objeto de la invención en una ejecución en la que carece de brazo y se observa la base de giro de la torreta de montaje de un brazo o herramienta y provista de un sensor de carga.
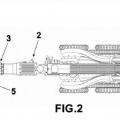
Figura 2. Muestra una vista en alzado lateral del robot de la figura anterior.
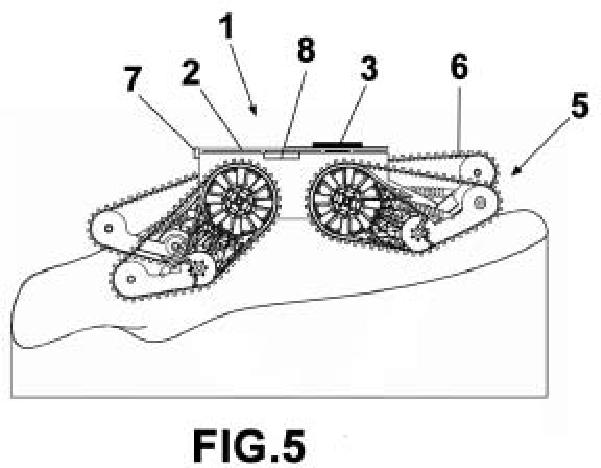
Figura 3. Muestra una vista en planta del robot de la figura 1.
Figura 4. Muestra una vista en perspectiva del robot objeto de la invención posicionado sobre una superficie...
Reivindicaciones:
1ª. ROBOT PARA MANIPULACIÓN DE ARTEFACTOS SOSPECHOSOS, siendo del tipo robots provistos de unos medios móviles de tracción con correspondientes correas y que son controlados por una consola de control a distancia, caracterizado por que el robot (1) comprende:
en la superficie superior del cuerpo de tanqueta (2) , una base de giro (3) con un sensor de carga (4) ;
cuatro medios móviles de tracción (5) , flippers, dos a cada lado del cuerpo de tanqueta (2) , accionados por respectivos motores con correspondientes encoders, controlando la posición, velocidad y par, de forma independiente de cada uno de ellos;
una correa de tracción (6) para cada medio móvil de tracción (5) , accionados por una pareja de motores, uno a cada lateral, para su transmisión dos a dos, en su desplazamiento, y;
unos sensores inerciales (7) integrados en el cuerpo de tanqueta (2) ;
unos sensores de inclinación (8) que junto con el control independiente de los flippers (5) , mantienen el cuerpo de tanqueta (2) en posición horizontal o en posición inclinada, en función de las necesidades,
de forma que, dadas las reducidas dimensiones del robot (1) , así como su desplazamiento por terrenos irregulares y la posibilidad de subir/bajar escaleras, accede a diferentes medios de transporte como autobuses, trenes y aviones, desplazándose y maniobrando por los pasillos.
2ª. ROBOT PARA MANIPULACIÓN DE ARTEFACTOS SOSPECHOSOS, según la 1ª reivindicación, caracterizado por que la base de giro (3) , dispuesta en la superficie superior del cuerpo de tanqueta (2) , monta un brazo o herramienta y mediante el sensor de carga (4) se controlan todas las operaciones que se llevan a cabo.
3ª. ROBOT PARA MANIPULACIÓN DE ARTEFACTOS SOSPECHOSOS, según la 1ª reivindicación, caracterizado por que mediante la pareja de motores, uno a cada lateral, para la transmisión dos a dos a los flippers 5, se desplaza el robot (1) .
4ª. ROBOT PARA MANIPULACIÓN DE ARTEFACTOS SOSPECHOSOS, según la 1ª reivindicación, caracterizado por que mediante los motores de accionamiento son solidarios dos a dos para la transmisión a las correas de los flippers (5) .
5ª. ROBOT PARA MANIPULACIÓN DE ARTEFACTOS SOSPECHOSOS, según la 1ª reivindicación, caracterizado por que el robot (1) es capaz de ponerse de pié sobre los flippers (5) posteriores.
Patentes similares o relacionadas:
Diente de arranque replegable con garra de aplicación para un equipamiento de bulldozer, del 9 de Enero de 2019, de RHEINMETALL LANDSYSTEME GMBH: Diente de arranque o respectivamente dientes de arranque para accesorios tanto en vehículos militares de ruedas o de orugas como en dispositivos […]
 Un implemento de vehículo desmontable, del 3 de Octubre de 2018, de Pearson Engineering Limited: Un implemento desmontable para un vehículo, comprendiendo el implemento una disposición de montaje para montar en un vehículo, comprendiendo la disposición […]
Un implemento de vehículo desmontable, del 3 de Octubre de 2018, de Pearson Engineering Limited: Un implemento desmontable para un vehículo, comprendiendo el implemento una disposición de montaje para montar en un vehículo, comprendiendo la disposición […]
VEHÍCULO TERRESTRE NO TRIPULADO PARA LA DETECCIÓN Y GEO-LOCALIZACIÓN DE ARTEFACTOS SITUADOS EN SUPERFICIE O ENTERRADOS, del 5 de Diciembre de 2017, de Ebotlution Systems SL: Vehículo terrestre no tripulado para la detección y geo-localización de artefactos situados en superficie o enterrados. Vehículo terrestre para la detección y geo-localización […]
BRAZO ARTICULADO TELESCÓPICO ROBOTIZADO, del 26 de Mayo de 2016, de PROYTECSA SECURITY, S.L: Brazo articulado telescópico robotizado, de accionamiento electrohidráulico remoto pudiendo ser instalado en vehículos operacionales para poder llevar a cabo […]
SOPORTE PARA DISRRUPTOR ADAPTADO A UNA PINZA DE UN BRAZO ROBOTIZADO, del 26 de Mayo de 2016, de PROYTECSA SECURITY, S.L: Soporte para disrruptor adaptado a una pinza de un brazo robotizado, estando basado el disrruptor en un tubo o cañón en cuya recámara aloja un cartucho […]
 SISTEMA ADAPTADO A UN ROBOT PARA MANIPULAR OBJETOS VOLUMINOSOS, del 5 de Agosto de 2015, de PROYTECSA SECURITY, S.L: Sistema adaptado a un robot para manipular objetos voluminosos, siendo del tipo de robots utilizados en operaciones de riesgo que disponen de un brazo articulado […]
SISTEMA ADAPTADO A UN ROBOT PARA MANIPULAR OBJETOS VOLUMINOSOS, del 5 de Agosto de 2015, de PROYTECSA SECURITY, S.L: Sistema adaptado a un robot para manipular objetos voluminosos, siendo del tipo de robots utilizados en operaciones de riesgo que disponen de un brazo articulado […]
 ROBOT CON SOPORTE PORTA HERRAMIENTAS, del 16 de Junio de 2015, de PROYTECSA SECURITY, S.L: Robot con soporte portaherramientas, siendo del tipo de robots utilizados en la manipulación de artefactos sospechosos, los cuales disponen de un brazo […]
ROBOT CON SOPORTE PORTA HERRAMIENTAS, del 16 de Junio de 2015, de PROYTECSA SECURITY, S.L: Robot con soporte portaherramientas, siendo del tipo de robots utilizados en la manipulación de artefactos sospechosos, los cuales disponen de un brazo […]
DISPOSITIVO DE PRUEBA DEL FUNCIONAMIENTO DE UN GENERADOR DE CAMPO MAGNÉTICO, del 7 de Febrero de 2012, de NEXTER SYSTEMS: Dispositivo de prueba del funcionamiento de un generador de campo magnético, y especialmente de una bobina de desminado, comprendiendo el dispositivo […]