ROBOT TELECOMANDO PARA OPERACIONES ESPECIALES.
1. Robot telecomandado para operaciones especiales, siendo del tipo de robots utilizados para llevar a cabo operaciones de riesgo,
tales como la manipulación de explosivos, los cuales disponen de un tren de rodadura, un brazo telescópico rematado en una pinza y unos medios de control y función a distancia, caracterizado porque el robot (1) incorpora sobre el tren de rodadura (3) una torreta (2), giratoria 360º, provista de, al menos, una cámara térmica (13) y a cuya torreta (2) es solidario un brazo (4) constituido por una serie de segmentos, unidos giratoriamente entre sí y accionados por unos cilindros hidráulicos, disponiendo el brazo (4) de, al menos, una cámara (14) y, al menos, un arma disuasoria (15-16), de forma que el brazo (4) está constituido por un primer y un segundo segmento (5) y (6) unidos a través de un cuerpo intermedio (7) que permite su acodamiento según planos paralelos, a cuyo segundo segmento (6) se une un tercer segmento telescópico (8) que queda unido a un cuarto segmento en paralelogramo (9), estando el cuarto segmento en paralelogramo (9) unido, por un eje, a un quinto segmento (10) que a su vez queda unido a un sexto segmento extremo (11) portador de una pinza (12), siendo accionado este sexto segmento extremo (11) portador de la pinza (12) por un motor.2. Robot telecomandado para operaciones especiales, según reivindicación 1ª, caracterizado porque el quinto segmento (10) unido al sexto segmento (11) portador de la pinza (12) mantiene su posición relativa al accionar el cuarto segmento en paralelogramo (9) al que está unido.3. Robot telecomandado para operaciones especiales, según reivindicación 1ª, caracterizado porque el quinto segmento (10) del brazo (4) del robot (1) es portador, en su lado superior de una cámara (14) y en sus lados laterales porta respectivas armas disuasorias (15) y (16)
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201030951.
Solicitante: PROYECTOS Y TECNOLOGIA SALLEN, S.L..
Nacionalidad solicitante: España.
Provincia: HUESCA.
Inventor/es: SALLEN ROSELLO,CESAR, TORRES PUEGO,ROBERTO.
Fecha de Solicitud: 20 de Septiembre de 2010.
Fecha de Publicación: .
Fecha de Concesión: 25 de Abril de 2011.
Clasificación PCT:
- F42D5/04 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F42 MUNICIONES; VOLADURA. › F42D VOLADURA (mechas, p. ej. cordones de mecha C06C 5/00; cartuchos de voladura F42B 3/00). › F42D 5/00 Dispositivos de seguridad. › Para hacer inofensivas las cargas explosivas, p. ej. para destruir municiones (extracción de cebos, desmontaje de municiones F42B 33/04, F42B 33/06 ); para hacer inofensiva la detonación de cargas explosivas.
Fragmento de la descripción:
Robot telecomandado para operaciones especiales.
Objeto de la invención
La siguiente invención, según se expresa en el enunciado de la presente memoria descriptiva, se refiere a un robot telecomandado para operaciones especiales, siendo del tipo de robots utilizados para llevar a cabo operaciones de riesgo, tales como la manipulación de explosivos, cuyos robots disponen de un tren de rodadura, un brazo telescópico rematado en una pinza y unos medios de control y función a distancia, de forma que el robot incorpora una torreta, giratoria 360º, sobre el tren de rodadura a cuya torreta es solidario un brazo constituido por una serie de segmentos, unidos entre sí estando accionados por una serie de cilindros hidráulicos y provisto de, al menos, una cámara y un arma disuasoria.
Así, el robot tiene como objeto la localización, la identificación, la manipulación y desarticulación de artefactos explosivos, actuando como vehículo de vigilancia y, dado que dispone de, al menos, un arma, también actúa como vehículo disuasorio.
Campo de aplicación
En la presente memoria se describe un robot telecomandado para operaciones especiales, de aplicación para la realización de diferentes operaciones especiales de protección, siendo de especial aplicación para la identificación, localización, manipulación y anulación o desarticulación de artefactos y cargas explosivas.
Asimismo, el robot telecomandado es de aplicación para la vigilancia de puntos estratégicos, así como de zonas fronterizas, pudiendo, incluso, actuar como medio disuasorio al ser portador de, al menos, un arma defensiva intimidatoria.
Antecedentes de la invención
Convencionalmente, cuando hay que manipular artefactos explosivos o realizar operaciones de riesgo, más aún, cuando están en riesgo vidas humanas, se utilizan robots que son manejados a distancia por medio de una consola de control.
De esta forma, entre los robots existentes para la manipulación de artefactos explosivos, podemos citar aquel que comprende un brazo articulado, según un único tramo, y sin posibilidad de girar según un plano horizontal, es decir, únicamente, tiene movimiento según un plano vertical y limitado por su único tramo articulado.
Asimismo, este tipo de robots disponen de una serie de elementos de control, como son cámara de visión y sensores de proximidad.
Por otra parte, podemos considerar diferentes documentos de patente, tal como, la patente de invención española ES P200302384 en la que se presenta un robot autopropulsado con unos medios de desplazamiento definidos por dos trenes de ruedas laterales y dos motores, independientes, los cuales transmiten movimiento, cada uno de ellos, a un tren lateral de ruedas, de forma que todas las ruedas no presentan igual diámetro, presentando el mismo una menor robustez al robot objeto del presente expediente.
Asimismo, podemos considerar el documento de patente ES en el que se presenta un robot autopropulsado para manipulación de cargas explosivas, del tipo de los manejados a distancia por medio de una consola de mandos y de utilidad para la manipulación de cargas y artefactos explosivos, de forma que dispone de unos medios de desplazamiento definidos por sendos trenes laterales de rodadura de oruga graduables, presentando en su parte anterior una pala de arrastre, de longitud graduable, así como un brazo articulado con el primer tramo del brazo en forma de horquilla accionado por una pareja de cilindros y quedando rematado en una pinza.
Igualmente, podemos considerar otros documentos como US 6113343; JP 20040060195 y JP 200326875, de forma que en el documento US 6113343 se describe un robot adaptado para uso en ambientes hostiles y, especialmente, para manipular explosivos, que incorpora un mecanismo de torrecilla con un brazo manipulador con un primer brazo pivotable 110º y un segundo brazo pivotable 120º.
En el documento JP 20040060195 se describe una máquina que comprende un cuerpo principal y un dispositivo de tracción dispuesto en cada lateral del cuerpo principal y al menos un dispositivo accionado por un fluido a presión para regular la anchura de tren de rodadura.
En el documento JP 200326875 se describe un vehículo con medios de desplazamiento definidos por trenes laterales de rodadura de oruga en los que los laterales de rodadura de la oruga se desplazan por la acción de unos cilindros y son conducidos por largueros de montaje y guía.
Descripción de la invención
En la presente memoria se describe un robot telecomandado para operaciones especiales, siendo del tipo de robots utilizados para llevar a cabo operaciones de riesgo, tales como la manipulación de explosivos, los cuales disponen de un tren de rodadura, un brazo telescópico rematado en una pinza y unos medios de control y función a distancia, de forma que el robot incorpora sobre el tren de rodadura una torreta, giratoria 360º, provista de, al menos, una cámara térmica y a cuya torreta es solidario un brazo constituido por una serie de segmentos, unidos giratoriamente entre sí y accionados por unos cilindros hidráulicos, disponiendo el brazo de, al menos, una cámara y, al menos, un arma disuasoria.
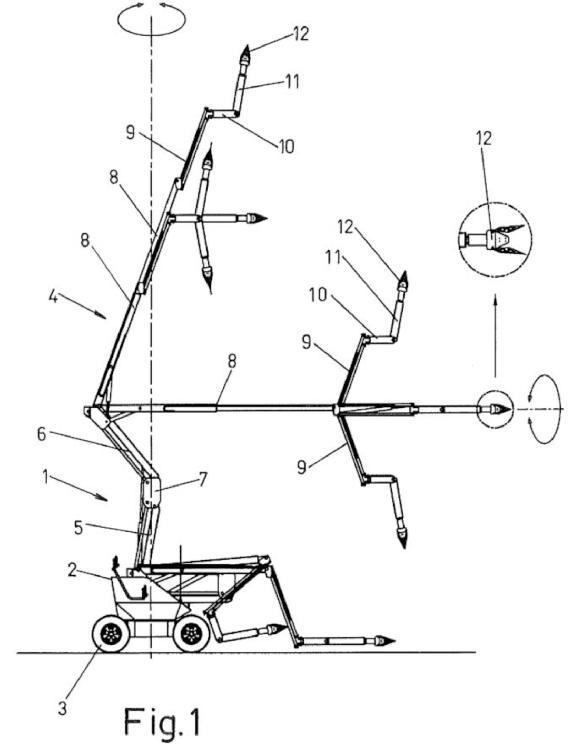
Así, el brazo esta constituido por un primer y un segundo segmento unidos a través de un cuerpo intermedio que permite su acodamiento según planos paralelos, a cuyo segundo segmento se une un tercer segmento telescópico que queda unido a un cuarto segmento en paralelogramo, estando el cuarto segmento en paralelogramo unido, por un eje, a un quinto segmento que a su vez queda unido a un sexto segmento extremo portador de una pinza, siendo accionado este sexto segmento extremo portador de la pinza por un motor.
El quinto segmento unido al sexto segmento portador de la pinza mantiene su posición relativa al accionar el cuarto segmento en paralelogramo al que esta unido.
Asimismo, el quinto segmento del brazo del robot es portador, en su lado superior de una cámara y en sus lados laterales porta respectivas armas disuasorias pudiendo ser usadas con un efecto intimida-torio.
De esta forma, el robot telecomandado podrá ser utilizado en diversas operaciones especiales, siendo así válido para la manipulación de explosivos, y, asimismo, podrá ser utilizado como vehículo de vigilancia en determinadas zonas, pudiendo actuar como medio disuasorio e intimidatoria al ser portador de, al menos, un arma.
Para complementar la descripción que seguidamente se va a realizar, y con objeto de ayudar a una mejor comprensión de las características de la invención, se acompaña a la presente memoria descriptiva, de un juego de planos, en cuyas figuras de forma ilustrativa y no limitativa, se representan los detalles más característicos de la invención.
Breve descripción de los diseños
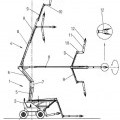
Figura 1. Muestra una vista en alzado lateral de una ejecución practica de un robot telecomandado con el brazo portador de una pinza en su extremo en distintas posiciones de trabajo, pudiendo observar la gran diversidad de movimientos que pueda adoptar.
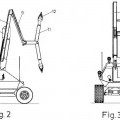
Figura 2. Muestra una vista en alzado del robot telecomandado con el brazo portador de una pinza en su extremo parcialmente plegado con el extremo portador de la pinza según dos posiciones de trabajo en un plano vertical.
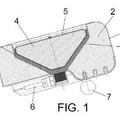
Figura 3. Muestra una vista frontal del robot telecomandado de la figura anterior, pudiendo observar como el brazo portador de la pinza en su extremo se pliega según dos planos paralelos.
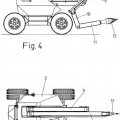
Figura 4. Muestra una vista en alzado lateral del robot telecomandado con el brazo portador de la pinza en su extremo en su posición de plegado.
Figura 5. Muestra una vista en planta del robot telecomandado de la figura anterior con el brazo portador de la pinza en su extremo en su posición de plegado.
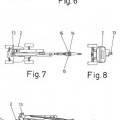
Figura 6. Muestra una vista en alzado lateral de una segunda ejecución practica de un robot telecomandado con el brazo portador de una pinza en su extremo plegado, pudiendo observar en proximidad a la pinza una cámara y un arma disuasoria.
Figura 7. Muestra una vista en planta del robot telecomandado de la figura anterior con el brazo portador de la pinza en su extremo en su posición de plegado, pudiendo observar en proximidad a la pinza una cámara y dos armas disuasorias.
Figura 8. Muestra una vista posterior del robot telecomandado de la figura 6, pudiendo observar la cámara de la torreta giratoria.
Figura...
Reivindicaciones:
1. Robot telecomandado para operaciones especiales, siendo del tipo de robots utilizados para llevar a cabo operaciones de riesgo, tales como la manipulación de explosivos, los cuales disponen de un tren de rodadura, un brazo telescópico rematado en una pinza y unos medios de control y función a distancia, caracterizado porque el robot (1) incorpora sobre el tren de rodadura (3) una torreta (2), giratoria 360º, provista de, al menos, una cámara térmica (13) y a cuya torreta (2) es solidario un brazo (4) constituido por una serie de segmentos, unidos giratoriamente entre sí y accionados por unos cilindros hidráulicos, disponiendo el brazo (4) de, al menos, una cámara (14) y, al menos, un arma disuasoria (15-16), de forma que el brazo (4) esta constituido por un primer y un segundo segmento (5) y (6) unidos a través de un cuerpo intermedio (7) que permite su acodamiento según planos paralelos, a cuyo segundo segmento (6) se une un tercer segmento telescópico (8) que queda unido a un cuarto segmento en paralelogramo (9), estando el cuarto segmento en paralelogramo (9) unido, por un eje, a un quinto segmento (10) que a su vez queda unido a un sexto segmento extremo (11) portador de una pinza (12), siendo accionado este sexto segmento extremo (11) portador de la pinza (12) por un motor.
2. Robot telecomandado para operaciones especiales, según reivindicación 1ª, caracterizado porque el quinto segmento (10) unido al sexto segmento (11) portador de la pinza (12) mantiene su posición relativa al accionar el cuarto segmento en paralelogramo (9) al que esta unido.
3. Robot telecomandado para operaciones especiales, según reivindicación 1ª, caracterizado porque el quinto segmento (10) del brazo (4) del robot (1) es portador, en su lado superior de una cámara (14) y en sus lados laterales porta respectivas armas disuasorias (15) y (16).
Patentes similares o relacionadas:
Método y montaje para posicionar y alinear un disruptor para desmantelar un objetivo, del 4 de Diciembre de 2019, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Procedimiento de posicionamiento y de alineación de un disruptor destinado al desmantelamiento de un objetivo y que comprende un eje de tiro, una dirección de tiro […]
Dispositivo de flotación marítima, del 10 de Julio de 2019, de Mas Zengrange (NZ) Limited: Un dispositivo de flotación marítima (MFD) para usar dispositivos de disparo remoto (RFD) por encima y por debajo de la línea de flotación por medio de iniciación […]
Método para combatir unidades de armamento cargadas con explosivo, y proyectil diseñado para el mismo, del 18 de Abril de 2018, de BAE SYSTEMS BOFORS AB: Método de combatir, con un proyectil que comprende una carga reactiva, una unidad de armamento cargada con explosivo, de modo que se minimizan efectos perjudiciales […]
Cámara de simulación, así como procedimiento para la activación controlada de cargas explosivas contenidas en mercancías, del 2 de Agosto de 2017, de Nautilus Softwaredesign, Vertreten Durch Ihren Inhaber, Michael Böck: Cámara de simulación para la activación controlada de cargas explosivas contenidas en una mercancía en condiciones simuladas, con una cámara de […]
SOPORTE PARA DISRRUPTOR ADAPTADO A UNA PINZA DE UN BRAZO ROBOTIZADO, del 4 de Diciembre de 2014, de PROYTECSA SECURITY, S.L: 1. Soporte para disrruptor adaptado a una pinza de un brazo robotizado, estando basado el disrruptor en un tubo o cañón en cuya recámara […]
 Conjunto de detonador inalámbrico, y métodos de voladura, del 27 de Septiembre de 2013, de ORICA EXPLOSIVES TECHNOLOGY PTY LTD: Conjunto de detonador inalámbrico para su uso en relación con una máquina de voladura que transmite almenos una señal de orden inalámbrica al conjunto de […]
Conjunto de detonador inalámbrico, y métodos de voladura, del 27 de Septiembre de 2013, de ORICA EXPLOSIVES TECHNOLOGY PTY LTD: Conjunto de detonador inalámbrico para su uso en relación con una máquina de voladura que transmite almenos una señal de orden inalámbrica al conjunto de […]
 DISPOSITIVO PARA LA DESTRUCCION POR GOLPEO DE ARTEFACTOS EXPLOSIVOS Y SIMILARES, del 13 de Noviembre de 2012, de SANTA BARBARA SISTEMAS, S.A: Dispositivo para la destrucción por golpeo de artefactos explosivos y similares que consiste en una cazoleta de plástico que alberga en su interior una pequeña […]
DISPOSITIVO PARA LA DESTRUCCION POR GOLPEO DE ARTEFACTOS EXPLOSIVOS Y SIMILARES, del 13 de Noviembre de 2012, de SANTA BARBARA SISTEMAS, S.A: Dispositivo para la destrucción por golpeo de artefactos explosivos y similares que consiste en una cazoleta de plástico que alberga en su interior una pequeña […]
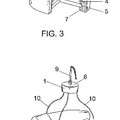
 CARGA EXPLOSIVA DE PROYECCION LIQUIDA, del 13 de Septiembre de 2012, de SANTA BARBARA SISTEMAS, S.A: Carga explosiva de proyección líquida.
La carga explosiva se basa en una pareja de depósitos (1 y 1'), estando el depósito (1') contenido en el interior del depósito […]
CARGA EXPLOSIVA DE PROYECCION LIQUIDA, del 13 de Septiembre de 2012, de SANTA BARBARA SISTEMAS, S.A: Carga explosiva de proyección líquida.
La carga explosiva se basa en una pareja de depósitos (1 y 1'), estando el depósito (1') contenido en el interior del depósito […]