Sistema y método para detectar desviaciones en los sistemas de localización calibrados.
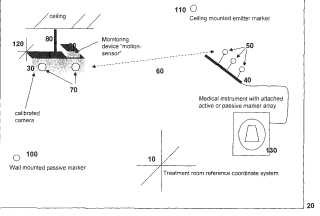
Un aparato para monitorizar un objeto (40) con respecto a un primer sistemade coordenadas (10),
comprendiendo el aparato:
un sistema de localización (30) calibrado con el primer sistema decoordenadas (10), para localizar el objeto (40);
un dispositivo detector de movimiento (90) asociado al sistema delocalización (30) para detectar un desplazamiento de un elemento delsistema de localización (30);
un sistema de procesamiento en comunicación con el dispositivodetector de movimiento (90) y el sistema de localización (30), eldispositivo de procesamiento configurado para:calcular la localización del objeto (40) con respecto al segundosistema de coordenadas (120) asociado al sistema de localización;calcular un factor de ajuste basado en el desplazamiento detectado;y
ajustar la localización del objeto (40) desde la localización conrespecto al segundo sistema de coordenadas (120) hasta unalocalización con respecto al primer sistema de coordenadas (10) deacuerdo con el factor de ajuste;
y
un dispositivo de ajuste de posición:
en el que el dispositivo de procesamiento se adapta paraproporcionar una señal al dispositivo de ajuste de posición, eldispositivo de ajuste de posición adaptado para ajustar la posición yorientación de dicho elemento del sistema de localización (30) enrespuesta a la señal, volviendo a calibrar así el sistema delocalización (30) con el primer sistema de coordenadas (10).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/CA2006/001289.
Solicitante: RESONANT MEDICAL INC.
Nacionalidad solicitante: Canadá.
Dirección: 2050 BLEURY STREET SUITE 200 MONTREAL, QUEBEC H3A 2J5 CANADA.
Inventor/es: FALCO, TONY.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B19/00
- G01B21/04 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 21/00 Disposiciones de medida o sus detalles en caso de no adaptarse a los tipos particulares de medios de medida de los otros grupos de esta subclase. › mediante la medida de coordenadas de puntos.
PDF original: ES-2388930_T3.pdf
Fragmento de la descripción:
SISTEMA Y METODO PARA DETECTAR DESVIACIONES EN LOS SISTEMAS DE LOCALIZACION CALIBRADOS Descripcion
CAMPO DE LA INVENCION [0001] La presente invención hace referencia de manera general al campo de la detección del movimiento, y la calibración, y mas en particular a un sistema y un metodo para detectar desviaciones en sistemas de localización calibrados utilizados para localizar caracteristicas, como por ejemplo elementos de una superficie o indicadores sujetos a o integrados dentro de un objeto, con respecto a uno o mas sistemas de coordenadas. ANTECEDENTES DE LA INVENCION [0002] Los sistemas de localización espacial se utilizan para varios procedimientos como por ejemplo para la extracción de una caracteristica de la superficie de un paciente, la navegación quirurgica, o como guia para el posicionamiento del paciente durante el suministro de un tratamiento. Un criterio de función critico de dichos sistemas es su precisión espacial, por ejemplo, la precisión con la que los sistemas de localización identifican y localizan la situación fisica de los objetos con respecto a uno
o mas sistemas conocidos de referencia de coordenadas. [0003] El sistema de localización esta tipicamente compuesto de un localizador óptico sujeto a la pared o al techo de una sala, o alternativamente situado sobre un tripode, cuya posición esta calibrada relativa a un sistema fijo de referencia de coordenadas. El localizador detecta las senales (por ejemplo de infrarrojos, magneticas, de radio, etc.) que emanan de los indicadores activos que estan adjuntos a la superficie de, o integrados dentro de, el objeto, o de manera alternativa de indicadores pasivos que reflejan las senales que emanan del mismo localizador. Utilizando las tecnicas de triangulación, la posición y orientación (6 DOF o de seis grados de libertad) de los indicadores, y mediante la sustitución del objeto al que los indicadores estan adjuntos, se puede calcular con respecto al localizador óptico, y a traves de una transformación, con respecto al sistema fijo de referencia de coordenadas. En otros modos de realización el localizador puede localizar elementos en un objeto directamente sin el uso de indicadores, como por ejemplo en el caso de una camara montada o de un sistema de escaneado laser que representa los elementos de la superficie del objeto (por ejemplo puntos en la piel de un paciente) y, a traves de una transformación, calcula la posición de estos elementos de la superficie con respecto al sistema fijo de referencia de coordenadas.
Sin embargo, la precisión de dicho sistema depende de mantener una relación constante entre el sistema fijo de coordenadas y el sistema de localización. Si, por ejemplo, el sistema de localización se desvia de su posición calibrada, si el localizador se desvia a lo largo del tiempo, podrian introducirse imprecisiones como para que la transformación entre el sistema de coordenadas del localizador y el sistema fijo de coordenadas ya no fuera precisa. Como resultado, las coordenadas asignadas a las caracteristicas individuales del objeto (por ejemplo la posición del indicador, la superficie, los puntos, las lesiones, etc.) estarian desalineadas con respecto al sistema fijo de coordenadas. Dichas desalineaciones pueden llevar a, por ejemplo, operaciones quirurgicas imprecisas o a un suministro incorrecto de tratamientos de radiación, con consecuencias potencialmente daninas. La publicación de la Patente Estadounidense US 2001/0036245 A1 hace referencia a un dispositivo de localización asistido por ordenador para su uso en cirugia ortopedica. El sistema proporciona una respuesta visual respecto a la posición de una herramienta quirurgica mediante imagenes fluoroscópicas de una parte del cuerpo durante una operación ortopedica. El sistema tambien proporciona una respuesta visual de la posición de una herramienta quirurgica con respecto a otra herramienta quirurgica o a un implante. El sistema de cirugia guiada por imagen Kienzle comprende: un sistema de dispositivo de localización/transporte trazado con un sistema de coordenadas para localizar una imagen de una parte del cuerpo; localizando los emisores asociados al sistema del dispositivo de transporte/localización para detectar el desplazamiento de un brazo C; y un controlador del sistema en comunicación con los emisores de localización y el sistema del dispositivo de localización/transporte. El controlador del sistema Kienzle esta configurado para detectar la situación de la imagen de la parte del cuerpo con respecto a un segundo sistema de coordenadas asociado al sistema, para calcular un ajuste basado en el desplazamiento detectado, y trazar la localización desde la imagen de la parte del cuerpo hasta una localización con respecto al segundo sistema de coordenadas con respecto al sistema de coordenadas de acuerdo con el ajuste. RESUMEN DE LA INVENCION [0005] De acuerdo con la presente invención se proporciona un aparato para monitorizar un objeto con respecto a un primer sistema de coordenadas como se define en la reivindicación 1 abajo. De acuerdo con la presente invención, tambien se proporciona un metodo para volver a calibrar la posición del dispositivo de localización como se especifica en la reivindicación 21 abajo. [0006] Los modos de realización de la invención proporcionan un metodo y un aparato para motorizar de manera independiente un sistema de localización calibrado con tal de detectar desviaciones temporales o colisiones accidentales que pueden desviar el sistema de la alineación o calibración con respecto a un sistema fijo de referencia de coordenadas. El aparato puede estar configurado para alertar a los usuarios de dichas desalineaciones, para inutilizar los relativos objetos localizados como dispositivos de tratamiento o de imagen hasta que dichos errores se corrigen, y en algunos casos para aplicar automaticamente acciones correctivas moviendo el sistema de localización o ajustando la posición del tratamiento o la imagen medica en consecuencia. [0007] En general, un dispositivo de sistema en movimiento se situa sobre o en el dispositivo de localización antes de, durante, o poco despues de su calibración. Una vez el localizador se calibra con el sistema fijo de coordenadas, el dispositivo del sistema en movimiento determina de manera continua o periódica si el localizador se ha desplazado de manera relativa al sistema fijo de coordenadas, y proporciona una respuesta al usuario y/o al dispositivo de control. La respuesta puede utilizarse simplemente para indicar que se necesita una nueva calibración, o en algun casos para volver a calibrar el localizador automaticamente. [0008] En un modo de realización, el aparato para detectar el movimiento de un localizador con respecto a un sistema fijo de coordenadas incluye un localizador que esta calibrado con el sistema de coordenadas, y uno o mas detectores de movimiento asociados a (por ejemplo montados sobre) el localizador. El detector de movimiento detecta el movimiento del localizador que podria afectar potencialmente la calibración del localizador del sistema de coordenadas. [0009] En algunos modos de realización, el aparato esta localizado cerca de un dispositivo portatil de imagen (por ejemplo, un escaner de ultrasonido) que incluye caracteristicas en la sonda de ultrasonido, como los indicadores, que emiten o reflejan senales (como las senales de infrarrojos) que son detectadas por el localizador. El sistema fijo de coordenadas puede estar definido, por ejemplo, mediante una serie de laseres situados en una sala, junto a la orientación fisica del dispositivo de tratamiento, junto a la orientación fisica de un dispositivo de imagen, o junto a la orientación fisica de un paciente durante una operación medica especifica. El detector de movimiento puede ser cualquier dispositivo apropiado como un sistema estabilizador, un aceler6metro, un inclinómetro, un magnet6metro, un reflectante sujeto a una pared o a un techo, indicadores activos, u otros dispositivos apropiados. En algunos casos, el aparato incluye un modulo que alerta al usuario de que el localizador ya no esta calibrado con el sistema fijo de coordenadas. La alerta puede estar basada, en algunos casos, en el movimiento detectado que excede un predeterminado limite. En algunos modos de realización, el detector de movimiento proporciona una senal al localizador (o al sistema de control para situar el localizador) que puede utilizarse para volver a calibrar automaticamente el localizador, y/o compensar por el movimiento detectado. [0010] En un metodo para volver a calibrar un sistema de localización con un sistema de referencia de coordenadas representado en esta invención, el metodo incluye la utilización de un dispositivo del sistema en movimiento para detectar errores de alineación entre el localizador y el sistema fijo de coordenadas,... [Seguir leyendo]
Reivindicaciones:
1. Un aparato para monitorizar un objeto (40) con respecto a un primer sistema
de coordenadas (10) , comprendiendo el aparato: un sistema de localización (30) calibrado con el primer sistema de coordenadas (10) , para localizar el objeto (40) ; un dispositivo detector de movimiento (90) asociado al sistema de localización (30) para detectar un desplazamiento de un elemento del sistema de localización (30) ; un sistema de procesamiento en comunicación con el dispositivo detector de movimiento (90) y el sistema de localización (30) , el dispositivo de procesamiento configurado para:
calcular la localización del objeto (40) con respecto al segundo sistema de coordenadas (120) asociado al sistema de localización; calcular un factor de ajuste basado en el desplazamiento detectado; y ajustar la localización del objeto (40) desde la localización con respecto al segundo sistema de coordenadas (120) hasta una localización con respecto al primer sistema de coordenadas (10) de acuerdo con el factor de ajuste; y un dispositivo de ajuste de posición: en el que el dispositivo de procesamiento se adapta para proporcionar una senal al dispositivo de ajuste de posición, el dispositivo de ajuste de posición adaptado para ajustar la posición y orientación de dicho elemento del sistema de localización (30) en respuesta a la senal, volviendo a calibrar asi el sistema de localización (30) con el primer sistema de coordenadas (10) .
2. El aparato de la reivindicación 1, en el que el factor de ajuste es una transformación.
3. El aparato de la reivindicación 1, en el que el sistema de localización (30) esta configurado para detectar caracteristicas asociadas al objeto (40) .
4. El aparato de la reivindicación 3, en el que las caracteristicas estan integradas en el objeto (40) .
5. El aparato de la reivindicación 3, en el que las caracteristicas estan localizadas en la superficie de los objetos.
6. El aparato de la reivindicación 3, en el que las caracteristicas comprenden al menos un indicador activo (50) .
7. El aparato de la reivindicación 6, en el que al menos un indicador activo (50) comprende al menos un indicador óptico, un indicador acustico, un indicador magnetico, indicadores electrónicos radioactivos, o emisores de radiofrecuencia.
8. El aparato de la reivindicación 3, en el que las caracteristicas comprenden al menos un indicador pasivo.
9. El aparato de la reivindicación 8, en el que al menos un indicador pasivo (50) comprende al menos un reflector, un indicador electrónico, un indicador acustico, un indicador magnetico, o un indicador radioactivo.
10.El aparato de la reivindicación 1, en el que el objeto (40) comprende al menos un dispositivo medico, una herramienta de navegación quirurgica, un dispositivo de diagnóstico, o un dispositivo de tratamiento.
11.La aplicación de la reivindicación 1, en la que el objeto comprende una caracteristica anatómica de un paciente.
12.El aparato de la reivindicación 11, en el que la caracteristica anatómica comprende una caracteristica externa del paciente.
13.El aparato de la reivindicación 11, en el que la caracteristica anatómica comprende una caracteristica interna del paciente.
14.El aparato de la reivindicación 1, en el que el sistema de localización (30) comprende al menos una camara óptica, un localizador magnetico, una camara de infrarrojos, un localizador basado en radiofrecuencia, o un dispositivo de escaneado de superficies por laser.
15.El aparato de la reivindicación 1, en el que el primer sistema de coordenadas 10 esta definido por una pluralidad de laseres situados en una sala.
16.El aparato de la reivindicación 1, en el que el primer sistema de coordenadas 10 esta definido por una de las orientaciones fisicas de un dispositivo medico, un dispositivo de tratamiento o una posición del paciente.
17.El aparato de la reivindicación 1, en el que el dispositivo detector de movimiento (90) comprende al menos un sistema de equilibrio, un aceler6metro, un inclinómetro, un magnet6metro, o una serie de indicadores montables.
18.El aparato de la reivindicación 1, comprendiendo tambien un m6dulo de alerta para alertar a un usuario del aparato de un desplazamiento del sistema de localización (30) .
19.El aparato de la reivindicación 18, en el que la alerta se basa en el desplazamiento detectado que excede un limite predeterminado.
20.El aparato de la reivindicación 1, comprendiendo tambien un dispositivo de control para controlar la operación de al menos uno de los dispositivos medico, dispositivo de tratamiento, o un dispositivo de diagnóstico.
21.Un metodo para utilizar el aparato de la reivindicación 1 para recalibrar un dispositivo de posición-localización con un sistema de referencia de coordenadas (10) , comprendiendo el metodo los pasos de:
calibrar una posición y orientación del sistema de localización (30) con el primer sistema de coordenadas (10) ; detectar errores de alineación basados en el movimiento entre el sistema de localización (30) y el primer sistema de coordenadas; basado en los errores de alineación detectados, recalibrar la posición y orientación del sistema de localización (30) con el primer sistema de coordenadas (10) para reducir los errores de alineación; y ajustar la posición y orientación del sistema de localización (30) para corregir los errores de alineación.
22.El metodo de la reivindicación 21, en el que los errores de alineación consisten en al menos un componente direccional de translación y/o rotación.
23.El metodo de la reivindicación 21, en el que el paso de ajuste se lleva a cabo de manera automatica en respuesta a la detección de un error de alineación.
24.El metodo de la reivindicación 21, en el que el paso de ajuste se lleva a cabo manualmente por el usuario.
25.El metodo de la reivindicación 21, comprendiendo tambien el paso de inutilizar el objeto (40) que esta siendo localizado por el sistema de localización (30) al detectar un error de alineación.
Patentes similares o relacionadas:
Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para la colocación de un objeto en un diente de un paciente, del 1 de Abril de 2020, de ALIGN TECHNOLOGY, INC.: Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para colocar un objeto en un diente de un […]
Combinación de un instrumento de terapia y formación de imagen, del 26 de Febrero de 2020, de ETHICON, INC.: Un instrumento combinado de terapia y formación de imágenes, comprendiendo el instrumento: una sonda de terapia para producir energía para alterar el tejido; […]
 Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Sistemas y métodos para la fabricación de una plantilla dental, del 28 de Mayo de 2019, de ALIGN TECHNOLOGY, INC.: Método para fabricación de una plantilla dental para posicionar un objeto en un diente de un paciente, que comprende: crear un modelo de diente […]
Endoscopio y dispositivo de tratamiento de accesorios integrado, del 4 de Marzo de 2019, de C.R. BARD, INC.: Endoscopio integrado que comprende un vástago que tiene extremos proximal y distal, y un dispositivo de aposición de tejido en el extremo distal […]
Microscopio quirúrgico y sensor de frente de onda integrados, del 7 de Marzo de 2018, de ALCON RESEARCH, LTD.: Un dispositivo para medir propiedades de un ojo , comprendiendo el dispositivo : un microscopio quirúrgico , un sensor de frente de […]
Fuente de alimentación para la identificación y control de herramientas quirúrgicas eléctricas, del 10 de Enero de 2018, de MICROLINE SURGICAL, INC: Un sistema para llevar a cabo cauterización térmica, que comprende: al menos un dispositivo de cauterización térmica, y una fuente de […]
Instalación para utilizar una plantilla con el fin de formar orificios para implantes en un maxilar, del 15 de Noviembre de 2017, de NOBEL BIOCARE SERVICES AG: Una instalación para formar orificios para implantes en un maxilar , comprendiendo la instalación una plantilla que se adapta a la forma […]