DISPOSITIVO DE CONTROL DE VEHÍCULO ELÉCTRICO.
Un controlador de vehículo eléctrico para la detección de velocidades de eje de los ejes correspondientes a una pluralidad de motores eléctricos de CA (4-7) controlados por par mediante un inversor (3) y para la detección de la marcha en vacío de las ruedas directamente unidas a los ejes,
que comprende: - unos medios (20) de cálculo de prioridad de alto nivel para extraer la frecuencia máxima de las frecuencias correspondientes a las respectivas velocidades de eje; - unos medios (21) de cálculo de prioridad de bajo nivel para extraer la frecuencia mínima de las frecuencias correspondientes a las respectivas velocidades de eje; - un primer restador (22) para restar la frecuencia mínima de la frecuencia máxima para calcular una primera desviación de frecuencia; - unos medios de retardo primario (23) en los que se introduce la primera desviación de frecuencia como un sistema de retardo primario para calcular una segunda desviación de frecuencia; - un segundo restador (24) para restar la segunda desviación de frecuencia de la primera desviación de frecuencia para calcular una desviación de frecuencia de marcha en vacío; - unos medios (25, 35, 38) de establecimiento de detección de marcha en vacío para producir un valor establecido de detección de marcha en vacío para evaluar la marcha en vacío de las ruedas en el nivel de frecuencia; - unos medios (26, 36, 39) de detección de marcha en vacío para la comparación de la desviación de frecuencia de marcha en vacío con el valor establecido de detección de marcha en vacío y producir una señal (26a) de detección de marcha en vacío cuando la desviación de frecuencia de marcha en vacío es mayor que el valor establecido de marcha en vacío; y - unos medios (40, 45, 48, 51) de corrección de instrucciones de par para calcular una cantidad de corrección de par de los motores eléctricos de CA (4-7) sobre la base de la señal de detección de marcha en vacío y ordenar la corrección del par al inversor (3)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/JP2005/008974.
Solicitante: MITSUBISHI DENKI K. K..
Nacionalidad solicitante: Japón.
Dirección: 7-3, MARUNOUCHI 2-CHOME CHIYODA-KU TOKYO 100-8310 JAPON.
Inventor/es: YOKOZUTSUMI,Ryo, NEGORO,Hideto.
Fecha de Publicación: .
Fecha Solicitud PCT: 17 de Mayo de 2005.
Clasificación Internacional de Patentes:
- B60L3/10 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60L PROPULSION DE VEHICULOS PROPULSADOS ELECTRICAMENTE (disposición o montaje de conjuntos de propulsión eléctrica o de varios motores principales diferentes para una propulsión recíproca o común sobre los vehículos B60K 1/00, B60K 6/20; disposición o montaje de la transmisión eléctrica en los vehículos B60K 17/12, B60K 17/14; prevención del patinado de las ruedas reduciendo la fuerza motriz en vehículos sobre raíles B61C 15/08; máquinas dinamoeléctricas H02K; control o regulación de motores H02P ); SUMINISTRO DE LA ENERGIA ELECTRICA AL EQUIPO AUXILIAR DE VEHICULOS PROPULSADOS ELECTRICAMENTE (circuitos eléctricos para el acoplamiento de vehículos B60D 1/64; calefacción eléctrica para vehículos B60H 1/00 ); SISTEMAS DE FRENOS ELECTRODINAMICOS PARA VEHICULOS, EN GENERAL (control o regulación de motores H02P ); SUSPENSION O LEVITACION MAGNETICAS PARA VEHICULOS; CONTROL DE LOS PARAMETROS DE FUNCIONAMIENTO SOBRE LOS VEHICULOS PROPULSADOS ELECTRICAMENTE; DISPOSITIVOS ELECTRICOS DE SEGURIDAD SOBRE VEHICULOS PROPULSADOS ELECTRICAMENTE. › B60L 3/00 Dispositivos eléctricos de seguridad sobre vehículos propulsados eléctricamente; Control de los parámetros de funcionamiento, p. ej. velocidad, deceleración o consumo de energía (métodos o disposición de circuitos para el control o monitoreo de baterías o pilas de combustible B60L 58/00). › Indicadores de patinaje de las ruedas.
Clasificación PCT:
- B60L9/18 B60L […] › B60L 9/00 Propulsión eléctrica a partir de energía externa al vehículo (propulsión eléctrica para vehículos mono rail, vehículos suspendidos o ferrocarriles de cremallera B60L 13/00; en combinación con baterías o pilas de combustible en el vehículo B60L 50/53). › alimentados por líneas de corriente continua.
Clasificación antigua:
- B60L9/18 B60L 9/00 […] › alimentados por líneas de corriente continua.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania.
PDF original: ES-2361553_T3.pdf
Fragmento de la descripción:
Campo de la invención La presente invención se refiere a un controlador de vehículo eléctrico para controlar la marcha en vacío de un vehículo eléctrico accionado por un motor eléctrico de CA (corriente alterna).
Técnica anterior Un vehículo eléctrico normalmente se acelera y desacelera mediante la fuerza de adhesión entre cada rueda y un carril. Sin embargo, cuando se aplica una fuerza de accionamiento más grande que la fuerza de adhesión en el momento de arranque del motor eléctrico de CA, se produce la marcha en vacío de las ruedas. Por otro lado, cuando se aplica una fuerza de frenado más grande que la fuerza de adhesión en el momento de frenado, se produce el deslizamiento de las ruedas. Por lo tanto, el comportamiento en aceleración/desaceleración de los vehículos eléctricos ha sido hasta ahora reforzado por la detección de marcha en vacío/deslizamiento y la reducción del par que se produce del motor eléctrico de CA para inducir rápidamente de nuevo una adhesión. Por ejemplo, según el Documento de Patente 1, primero se calcula la velocidad media de las velocidades de giro de varios motores eléctricos de CA, se calcula una cantidad de corrección de diferencia de diámetros de ruedas de las ruedas unidas a cada motor eléctrico de CA sobre la base de la relación entre la velocidad media y la velocidad de giro de cada motor eléctrico de CA, y luego se calcula una velocidad de referencia que servirá como referencia para el control de vuelta a la adhesión en cada unidad de control sobre la base de la cantidad de corrección de diferencia de diámetros de ruedas y la velocidad media. La marcha en vacío de las ruedas se detecta sobre la base de la velocidad media y la velocidad de giro del motor eléctrico de CA a controlar en cada unidad de control, y el par del motor eléctrico AC se reduce de acuerdo con la diferencia entre la velocidad de referencia y la velocidad de giro del motor eléctrico de CA a controlar por cada unidad de control, realizando con ello el control de vuelta a la adhesión en marcha en vacío.
Documento de Patente 1: JP-A-2001-145207 (página 3, Fig. 1.)
Descripción de la Invención
Problema a resolver por la Invención Sin embargo, en el controlador convencional de vehículos eléctricos, la marcha en vacío se detecta sobre la base de la velocidad media del motor eléctrico de CA y la velocidad de giro del motor eléctrico de CA a controlar como se ha descrito anteriormente, y de este modo el control de par se lleva a cabo de acuerdo con la diferencia entre la velocidad de referencia y la velocidad de giro del motor eléctrico de CA a controlar en cada unidad de control. Por lo tanto, son necesarios unos medios de cálculo de la velocidad media y de la cantidad de corrección de diferencia de diámetros de ruedas, y por lo tanto existe el problema de que el control es complicado.
La presente se ha implementado para resolver el problema anterior, y tiene el objetivo de proporcionar un controlador de vehículo eléctrico que pueda simplificar el control y realizar un procesamiento rápido.
Medios para Resolver el problema De acuerdo con la invención, un controlador de vehículo eléctrico para detectar las velocidades de eje de los ejes correspondientes a varios motores eléctricos de CA controlados por par mediante un inversor y para detectar la marcha en vacío del eje directamente, conectados a los ejes, comprende:
unos medios de cálculo de prioridad de alto nivel para extraer la frecuencia máxima de las frecuencias correspondientes a las respectivas velocidades de eje; medios de cálculo de prioridad de bajo nivel para extraer la frecuencia mínima de las frecuencias correspondientes a las respectivas velocidades de eje; un primer restador para restar la frecuencia mínima de la frecuencia máxima para calcular una primera desviación de frecuencia; unos medios de retardo primario para la recepción de la primera desviación de frecuencia como un sistema de retardo primario para calcular una segunda desviación de frecuencia; un segundo restador para restar la segunda desviación de frecuencia de la primera desviación de frecuencia para calcular una desviación de frecuencia de marcha en vacío; unos medios de detección de marcha en vacío para producir la salida de un valor establecido de detección de marcha en vacío para evaluar la marcha en vacío de las ruedas en el nivel de frecuencia; unos medios de detección de marcha en vacío para la comparación de la desviación de frecuencia de marcha en vacío con el valor establecido de detección de marcha en vacío y producir una señal de detección de marcha en vacío cuando la desviación de frecuencia de marcha en vacío es mayor que el valor establecido de marcha en vacío; y unos medios de corrección de par para calcular una cantidad de corrección de par del motor eléctrico de CA sobre la base de la señal de detección de marcha en vacío y ordenar la corrección de par al inversor.
Ventaja de la Invención De acuerdo con la invención, la segunda desviación de frecuencia se resta de la primera desviación de frecuencia para calcular la desviación de frecuencia de marcha en vacío que solo varía en el estado de marcha en vacío, y la desviación de frecuencia de marcha en vacío y el valor establecido de detección de marcha en vacío se comparan entre sí para producir la señal de detección de marcha en vacío. Por lo tanto, la detección de marcha en vacío puede realizarse de forma instantánea sin verse afectada por una diferencia de diámetros de ruedas, y puede conseguirse un efecto de forma que puede realizarse un control de corrección de par simple y rápido/preciso.
Mejores modos para realizar la Invención
Primera Realización La Fig. 1 es un diagrama de construcción que muestra la relación de un controlador de vehículo eléctrico, un inversor y unos motores eléctricos de CA de acuerdo con una primera realización. En la Fig. 1, la energía de CC (corriente continua) recogida desde un cable aéreo 1 a través de un colector de energía 2 se suministra a un inversor 3 y se convierte en energía de CA trifásica de fase U, fase V y fase W. Unos motores eléctricos de CA 4 a 7 para un vehículo eléctrico, tales como motores de inducción o similares, son accionados por la energía de CA trifásica como la salida del inversor 3. Los números de giro N1 a N4 de los respectivos motores eléctricos de CA 4 a 7 que son detectados por los generadores de impulsos 8 a 11 se introducen en un controlador 12 de vehículo eléctrico 12. Además, la corriente de entrada INU, INV, INW de los motores eléctricos de CA 4 a 7 que es detectada por los detectores de corriente 13 a 15 se introduce al controlador 12 de vehículo eléctrico. Además, se introduce una señal 16 de instrucción de andén de un conductor de una instrucción de muesca de marcha con energía desde el andén de un conductor (no se muestra) y una señal 17 de instrucción de ponderación de carga desde un dispositivo de ponderación de carga (no se muestra) al controlador 12 de vehículo eléctrico 12. El control de corriente de eje-q del inversor 3 se lleva a cabo por una salida de señal 18 de control de corriente de eje-q desde el controlador 12 de vehículo eléctrico.
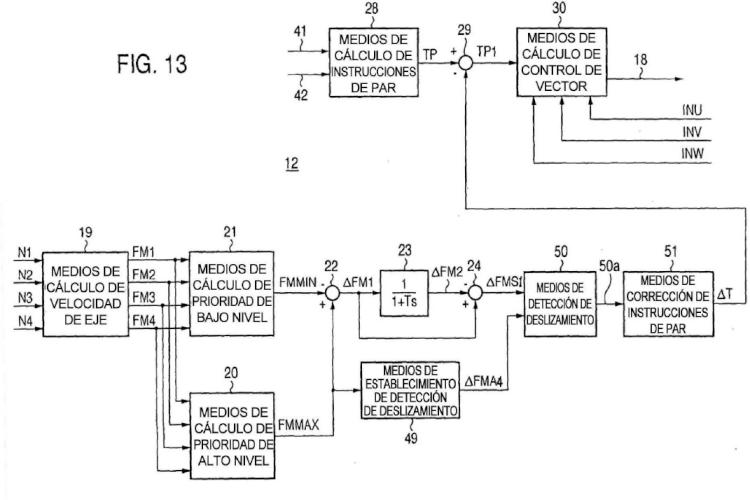
La Fig. 2 es un diagrama de bloques que muestra una construcción interna del controlador 12 de vehículo eléctrico según una primera realización que implementa la invención. En las Figs. 1 y 2, en los medios 16 de cálculo de la velocidad de eje, las frecuencias FM1 a FM4 correspondientes a las respectivas velocidades de eje de los ejes (no se muestran) que se conectan directamente a las ruedas (no se muestran) se calculan a partir de los números de giro N1 a N4 de los motores eléctricos de CA 4 a 7 detectados por los generadores de impulsos 8 a 11. Los medios 20 de cálculo de prioridad de alto nivel extraen la frecuencia máxima FMMAX correspondiente a la velocidad de eje del eje conectado directamente a la rueda de diámetro mínimo. Además, los medios 21 de cálculo de prioridad de bajo nivel extraen igualmente la frecuencia mínima FMMIN a partir de las frecuencias respectivas FM1 a FM4. Posteriormente, la frecuencia mínima FMMIN se resta de la frecuencia máxima FMMAX en un primer restador 22 para calcular una primera desviación de frecuencia FM1.
La primera desviación de frecuencia FM1 se introduce en los medios 23 de retardo primario como un sistema de retardo primario para calcular una segunda desviación de frecuencia FM2. Posteriormente, en un segundo restador 24, la segunda desviación de frecuencia FM2 se resta de la primera desviación de frecuencia FM1... [Seguir leyendo]
Reivindicaciones:
1. Un controlador de vehículo eléctrico para la detección de velocidades de eje de los ejes correspondientes a una pluralidad de motores eléctricos de CA (4-7) controlados por par mediante un inversor (3) y para la detección de la marcha en vacío de las ruedas directamente unidas a los ejes, que comprende:
- unos medios (20) de cálculo de prioridad de alto nivel para extraer la frecuencia máxima de las frecuencias correspondientes a las respectivas velocidades de eje;
- unos medios (21) de cálculo de prioridad de bajo nivel para extraer la frecuencia mínima de las frecuencias correspondientes a las respectivas velocidades de eje;
- un primer restador (22) para restar la frecuencia mínima de la frecuencia máxima para calcular una primera desviación de frecuencia;
- unos medios de retardo primario (23) en los que se introduce la primera desviación de frecuencia como un sistema de retardo primario para calcular una segunda desviación de frecuencia;
- un segundo restador (24) para restar la segunda desviación de frecuencia de la primera desviación de frecuencia para calcular una desviación de frecuencia de marcha en vacío;
- unos medios (25, 35, 38) de establecimiento de detección de marcha en vacío para producir un valor establecido de detección de marcha en vacío para evaluar la marcha en vacío de las ruedas en el nivel de frecuencia;
- unos medios (26, 36, 39) de detección de marcha en vacío para la comparación de la desviación de frecuencia de marcha en vacío con el valor establecido de detección de marcha en vacío y producir una señal (26a) de detección de marcha en vacío cuando la desviación de frecuencia de marcha en vacío es mayor que el valor establecido de marcha en vacío; y
- unos medios (40, 45, 48, 51) de corrección de instrucciones de par para calcular una cantidad de corrección de par de los motores eléctricos de CA (4-7) sobre la base de la señal de detección de marcha en vacío y ordenar la corrección del par al inversor (3).
2. Un controlador de vehículo eléctrico para la detección de velocidades de eje de los ejes correspondientes a una pluralidad de motores eléctricos de CA (4-7) controlados por par mediante un inversor (3) y para la detección de marcha en vacío de las ruedas directamente unidas a los ejes, en los que una pluralidad de motores de inducción correspondientes a un número predeterminado de árboles de accionamiento de ruedas son accionados en paralelo por un inversor (3), que comprende:
- unos medios (20) de cálculo de prioridad de alto nivel para extraer la frecuencia máxima de las frecuencias correspondientes a las respectivas velocidades de eje;
- unos medios (21) de cálculo de prioridad de bajo nivel para extraer la frecuencia mínima de las frecuencias correspondientes a las respectivas velocidades de eje;
- un primer restador (22) para restar la frecuencia mínima de la frecuencia máxima para calcular una primera desviación de frecuencia;
- unos primeros medios (31) de derivación en el tiempo para la derivación en el tiempo de la primera desviación desde el momento inicial de medición de tiempo predeterminado para un tiempo predeterminado t1 para calcular una primera cantidad de variación de tiempo;
- unos segundos medios (32) de derivación en el tiempo para la derivación en el tiempo de la primera desviación de frecuencia desde el momento inicial de medición de tiempo para un tiempo predeterminado t2 mayor que el tiempo t1 para calcular una primera cantidad temporal de variación de tiempo;
- unos medios de conversión (33) para convertir la cantidad temporal de variación de tiempo en la cantidad de variación del tiempo t1 para calcular una segunda cantidad de variación de tiempo;
- un segundo restador (34) para restar la primera cantidad de variación de tiempo de la segunda cantidad de variación de tiempo para calcular una desviación de frecuencia de marcha en vacío;
- unos medios (25, 35, 38) de establecimiento de detección de marcha en vacío para producir un valor establecido de detección de marcha en vacío para evaluar la marcha en vacío de las ruedas en el nivel de frecuencia;
- unos medios de generación de señal de detección de marcha en vacío para la comparación de la desviación de frecuencia de marcha en vacío con el valor establecido de detección de marcha en vacío y producir una señal de detección de marcha en vacío cuando la desviación de frecuencia de marcha en vacío es mayor que el valor establecido de marcha en vacío; y
- unos medios (40, 45, 48, 51) de corrección de instrucciones de par para calcular la cantidad de corrección de par de los motor eléctricos de CA (4-7) sobre la base de la señal de detección de marcha en vacío y ordenar la corrección del par al inversor (3).
3. Un controlador de vehículo eléctrico para la detección de velocidades de eje de los ejes correspondientes a una pluralidad de motores eléctricos de CA (4-7) controlados por par mediante un inversor (3) y para la detección de la marcha en vacío de las ruedas directamente unidas a los ejes, que comprende:
- unos medios (20) de cálculo de prioridad de alto nivel para extraer la frecuencia máxima de las frecuencias correspondientes a las respectivas velocidades de eje;
- unos medios (21) de cálculo de prioridad de bajo nivel para extraer la frecuencia mínima de las frecuencias correspondientes a las respectivas velocidades de eje;
- un primer restador (22) para restar la frecuencia mínima de la frecuencia máxima para calcular una primera desviación de frecuencia;
- unos medios de retardo primario (23) en los que se introduce la primera desviación de frecuencia como un sistema de retardo primario para restar una segunda desviación de frecuencia;
- un segundo restador (24) para restar la segunda desviación de frecuencia de la primera desviación de frecuencia para calcular una desviación de frecuencia de marcha en vacío;
- unos medios (25, 35, 38) de establecimiento de detección de marcha en vacío para llevar a cabo el establecimiento de detección de marcha en vacío para evaluar la marcha en vacío de los ejes en el nivel de frecuencia y la comparación del valor establecido de detección de marcha en vacío con un valor predeterminado cuando la frecuencia correspondiente a la velocidad de eje alcanza un valor predeterminado, y producir la salida del valor establecido de detección de marcha en vacío con la desviación de frecuencia de marcha en vacío reduciendo el valor establecido de detección de marcha en vacío solo un valor predeterminado;
- unos medios (26, 36, 39) de detección de marcha en vacío para la comparación entre sí de la desviación de frecuencia de marcha en vacío y el valor establecido de detección de marcha en vacío y producir una señal de detección de marcha en vacío cuando la desviación de frecuencia de marcha en vacío es mayor que el valor establecido de marcha en vacío; y
- unos medios (40, 45, 48, 51) de corrección de instrucciones de par para calcular una cantidad de corrección de par de los motor eléctricos de CA (4-7) sobre la base de la señal de detección de marcha en vacío y ordenar la corrección del par al inversor (3).
4. El controlador según la reivindicación 3, en el que el valor establecido de detección de marcha en vacío se cambia de acuerdo con la característica del motor cuando la frecuencia correspondiente a la velocidad de eje cambia desde la zona de aceleración constante del motor de inducción y llega a la zona de característica de motor.
5. El controlador según la reivindicación 1, en el que mediante la detección de deslizamiento que se produce en las ruedas directamente conectadas con los ejes correspondientes a la pluralidad de motores eléctricos de CA (4-7) durante la operación de frenado del vehículo, se lleva a cabo un control de par.
6. El controlador según la reivindicación 2, en el que mediante la detección de deslizamiento que se produce en las ruedas directamente conectadas con los ejes correspondientes a la pluralidad de motores eléctricos de CA (4-7) durante la operación de frenado del vehículo, se lleva a cabo un control de par.
7. El controlador según la reivindicación 3, en el que mediante la detección de deslizamiento que se produce en las ruedas directamente conectadas con los ejes correspondientes a la pluralidad de motores eléctricos de CA (4-7) durante la operación de frenado del vehículo, se lleva a cabo un control de par.
Patentes similares o relacionadas:
Procedimiento, sistema y producto de programa informático de control de frenado de una máquina montada para movimiento sobre rieles, del 8 de Abril de 2020, de CARGOTEC FINLAND OY: Procedimiento de control de frenado de una grúa montada para el movimiento sobre rieles o un carro, usado en una grúa, montado para el movimiento […]
Método para controlar y recuperar la adherencia de las ruedas de un eje controlado de un vehículo ferroviario, del 6 de Noviembre de 2019, de Faiveley Transport Italia S.p.A: Método para controlar y posiblemente recuperar la adherencia de las ruedas (W) de un eje (A) controlado de un vehículo ferroviario, que comprende las etapas de […]
Procedimiento para el frenado de un vehículo, así como vehículo, del 7 de Marzo de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para el frenado de un vehículo , que se mueve a lo largo de una calzada, por medio de un dispositivo de frenado que comprende al menos un freno de […]
 Motor eléctrico para un vehículo eléctrico, del 11 de Julio de 2018, de Protean Electric Limited: Un motor eléctrico para hacer girar una rueda de un vehículo , el motor eléctrico tiene un rotor , un estator y enrollados de bobina, un primer sensor […]
Motor eléctrico para un vehículo eléctrico, del 11 de Julio de 2018, de Protean Electric Limited: Un motor eléctrico para hacer girar una rueda de un vehículo , el motor eléctrico tiene un rotor , un estator y enrollados de bobina, un primer sensor […]
Sistema de control de posición, del 10 de Enero de 2018, de Universal City Studios LLC: Un método para controlar un vehículo que tiene ruedas ubicado en un trayecto fijo, comprendiendo el vehículo un procesador de vehículo y un dispositivo […]
 Vehículo ferroviario con medios para la supervisión del valor de adhesión entre carril y la rueda, del 7 de Junio de 2012, de KNORR-BREMSE SYSTEME FUR SCHIENENFAHRZEUGE GMBH: Vehículo ferroviario con al menos un conjunto de accionamiento , que acciona parejas de ruedas (3a-3j) dispuestas sobre varios ejes, que circulan sobre un carril fijo , […]
Vehículo ferroviario con medios para la supervisión del valor de adhesión entre carril y la rueda, del 7 de Junio de 2012, de KNORR-BREMSE SYSTEME FUR SCHIENENFAHRZEUGE GMBH: Vehículo ferroviario con al menos un conjunto de accionamiento , que acciona parejas de ruedas (3a-3j) dispuestas sobre varios ejes, que circulan sobre un carril fijo , […]
DISPOSITIVO DE CONTROL DE LA ADHERENCIA DE UN CONVOY FERROVIARIO ELECTRICO., del 1 de Julio de 2006, de ALSTOM: Dispositivo de control de la adherencia de una locomotora de un convoy ferroviario eléctrico, que comprende una etapa de regulación de la alimentación […]
 DISPOSICIONES PARA MEJORAR LA UTILIZACIÓN DE LA ADHERENCIA EN LOS VEHÍCULOS DE MOTOR TÉRMICO CON TRANSMISIÓN ELÉCTRICA, del 16 de Octubre de 1960, de SOCIÉTÉ GÉNÉRALE DE CONSTRUCTIONS ELÉCTRIQUES ET MECANIQUES (ALSTHOM): Disposiciones para mejorar la utilización de la adherencia en los vehículos de motor térmico con transmisión eléctrica, caracterizadas por el empleo […]
DISPOSICIONES PARA MEJORAR LA UTILIZACIÓN DE LA ADHERENCIA EN LOS VEHÍCULOS DE MOTOR TÉRMICO CON TRANSMISIÓN ELÉCTRICA, del 16 de Octubre de 1960, de SOCIÉTÉ GÉNÉRALE DE CONSTRUCTIONS ELÉCTRIQUES ET MECANIQUES (ALSTHOM): Disposiciones para mejorar la utilización de la adherencia en los vehículos de motor térmico con transmisión eléctrica, caracterizadas por el empleo […]