DISPOSITIVO ANTICOLISION CON EL TERRENO PARA AERONAVE CON PREDICCION DE VIRAJE.
UNA MEMORIA DE TRABAJO (3,30) QUE CONTIENE UN MAPA ALTIMETRICO LOCAL Y QUE DEFINE UNA ENVOLTURA EN ALTITUD DEL TERRENO PROXIMO A LA AERONAVE.
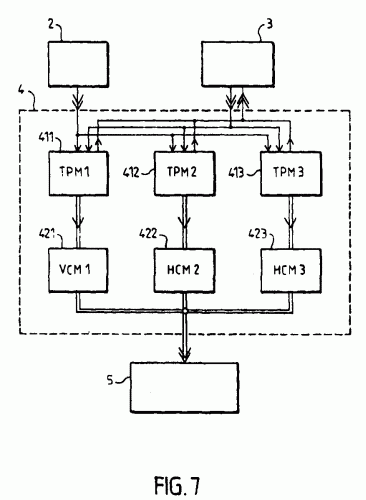
SE ESTABLECE UNA TRAYECTORIA LIMITE VERTICAL DE LA AERONAVE (411) A PARTIR DE INDICACIONES DE ESTADO Y DE PARAMETROS ELEGIDOS DE VUELO EN LA SUPERFICIE VERTICAL QUE CONTIENE EL EJE DE SU TRAYECTORIA. SE HACE UNA PRIMERA COMPARACION (421) ENTRE ESTA TRAYECTORIA LIMITE VERTICAL Y LA PARTE CORRESPONDIENTE DE LA ENVOLTURA EN ALTITUD PARA DETERMINAR EL RIESGO DE COLISION VERTICAL CON EL SUELO, Y PUEDE ESTABLECERSE UNA ALARMA (5) EN FUNCION DEL RESULTADO DE ESTA PRIMERA COMPARACION. SE ESTABLECE TAMBIEN UNA TRAYECTORIA LIMITE LATERAL DE LA AERONAVE A UN LADO DE LA VERTICAL DE LA TRAYECTORIA DE VUELO (412) A PARTIR DE LAS INDICACIONES DE ESTADO Y DE LOS PARAMETROS ELEGIDOS. SE HACE UNA SEGUNDA COMPARACION (422) ENTRE ESTA TRAYECTORIA LIMITE LATERAL Y LA PARTE CORRESPONDIENTE DE LA ENVOLTURA EN ALTITUD. LOS MEDIOS DE ALARMA (5) ESTAN DISPUESTOS DE FORMA QUE MODIFIQUEN UNO AL MENOS DE LOS ESTADOS DE ALARMA RELATIVOS A LA PRIMERA COMPARACION SI LOS SEGUNDOS MEDIOS DE COMPARACION NO INDICAN RIESGO DE COLISION CON EL SUELO. OCURRE LO MISMO DEL OTRO LADO, CON OTRA TRAYECTORIA LIMITE LATERAL.
Tipo: Resumen de patente/invención.
Solicitante: DASSAULT ELECTRONIQUE.
Nacionalidad solicitante: Francia.
Dirección: 55, QUAI MARCEL DASSAULT,F-92210 SAINT-CLOUD.
Inventor/es: MEUNIER, HUGUES.
Fecha de Publicación: .
Fecha Concesión Europea: 1 de Agosto de 2001.
Clasificación Internacional de Patentes:
- G01C21/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968).
- G05D1/06 G […] › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Régimen de modificación de la altitud o de la profundidad.
- G08G5/04 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 5/00 Sistemas del control del tráfico aéreo. › Sistemas anticolisión.
Patentes similares o relacionadas:
Procedimiento y dispositivo de identificación de un avión en conexión con el estacionamiento del avión en un puesto de estacionamiento, del 3 de Junio de 2020, de thyssenkrupp Airport Solutions, S.A: Procedimiento de identificación de un avión e indicación del tipo y versión del avión en conexión con el estacionamiento del avión en una puerta […]
Un procedimiento para controlar las luces de advertencia de un vehículo aéreo no tripulado y un sistema para su aplicación, del 11 de Diciembre de 2019, de Aerobits Sp. z o.o: Un procedimiento para controlar las luces de advertencia de un vehículo aéreo no tripulado, en un sistema, en el que una o más luces de advertencia están […]
UN SISTEMA PARA EFECTUAR MULTIPLICIDAD DE TAREAS COMPLEJAS POSIBLES SOBRE OBRAS, MEDIANTE EQUIPOS AUTÓNOMOS NO TRIPULADOS EN VUELO., del 24 de Octubre de 2019, de MURA YAÑEZ, Miguel Angel: Existe una necesidad en la industria de efectuar multiplicidad de tareas complejas posibles en obras; de manera segura, aumentando duración de […]
Sistema de orientación de un dron, del 2 de Octubre de 2019, de PARADOX ENGINEERING SA: Sistema de orientación para un dron , que comprende: - una pluralidad de dispositivos que se interconectan en una red inalámbrica […]
Sistema satelital autónomo de evitación de desechos orbitales, del 15 de Mayo de 2019, de Briskman, Robert: Un sistema satelital que puede evitar de forma autónoma una colisión con desechos orbitales , que incluye un satélite , […]
Identificación aeronaves, del 13 de Noviembre de 2018, de ADB Safegate Sweden AB: Procedimiento, implementado en una sistema de atraque de aeronaves , el cual comprende un receptor , un procesador , y una pantalla de […]
Cálculo del tiempo que falta y del tamaño de un objeto en base a la correlación de escala entre imágenes que provienen de un sensor electro - óptico, del 2 de Mayo de 2018, de SAAB AB: Un procedimiento para calcular un valor de Tiempo Que Falta, TTG, entre un vehículo y un objeto intrusivo, comprendiendo el citado procedimiento: • un paso de recuperar […]
Sistema de separación de aeronaves de tráfico, del 18 de Octubre de 2017, de THE BOEING COMPANY: Un método para gestionar la separación entre vehículos , comprendiendo el método: predecir un punto de aproximación más cercano entre un primer […]