12 inventos, patentes y modelos de COLLADO JIMENEZ, VALENTIN
Dispositivo para la elaboración de preformas de componentes reforzados con fibras de carbono.
(22/11/2018) Dispositivo para la elaboración de preformas de componentes reforzados con fibras de carbono, que comprende un molde de preformado que se puede inmovilizar en un banco de trabajo ; una membrana de compactación estanca con alta elongación que es elásticamente deformable debido a la acción de una fuerza neumática, de manera que es capaz de adaptarse a la geometría externa de una preforma dispuesta sobre el molde ; un dispositivo de compactación con un marco de fijación en el que está montada la membrana y se puede acoplar a un dispositivo elevador a través de un sistema de acoplamiento para desplazar el dispositivo de compactación entre una posición retirada y una posición de compactación en la que la membrana queda superpuesta a…
Dispositivo y procedimiento para la fijación de piezas.
(31/12/2014) Dispositivo para la fijación de piezas, caracterizado porque comprende:
- un elemento generador magnético , configurado para generar flujo magnético , que presenta una cara superior ,
- un recipiente formado por paredes sustancialmente verticales, sin fondo o tapa, perfectamente sujeto sobre la superficie superior del elemento generador magnético ,
- un fluido magnetorreológico que presenta un punto de fluencia alto localizado sobre la superficie superior del elemento generador magnético y contenido por el recipiente formando una capa exenta de burbujas,
- en el que el elemento generador magnético presenta la capacidad de generar un flujo magnético en el fluido magnetorreológico mayor de 100 mT.
Dispositivo de posicionamiento controlado por cables.
(09/04/2014) Una dispositivo de posicionamiento que comprende una plataforma permanentemente apoyada sobre una superficie de trabajo controlada a través de cuatro cables , donde el primer extremo de cada cable se encuentra unido a un mecanismo de recogida y liberación de cable que controla la longitud y tensión del mismo y el otro extremo del cable -3- se amarra a mecanismos de amarre de la plataforma para tirar de la misma, siendo los mecanismos de amarre giratorios perpendicular y paralelamente a la superficie de trabajo y extendiéndose cada cable oblicuamente con respecto a la superficie de trabajo desde su mecanismo de amarre hacia su mecanismo de recogida y liberación de cable , de forma que la tracción de los cables mueve la plataforma controladamente por la superficie…
Dispositivo manipulador y compactador de membrana para la fabricación automatizada de preformas de materiales compuestos y procedimiento para obtener tales preformas.
(29/10/2013) Dispositivo manipulador y compactador de membrana para obtener preformas compuestas por láminas de tejidos defibra útiles en la fabricación automatizada de materiales compuestos, que comprende una estructura de soporte acoplable a un elemento móvil de traslación mediante una estructura de fijación ; una membrana montada en laestructura de soporte ; y al menos un conector de vacío montado en la estructura de soporte ; en el quela estructura de soporte es un marco con una abertura central :
la membrana es una membrana elásticamente flexible que comprende una franja perimetral inmovilizada en laestructura de soporte que rodea una zona central que tapa la abertura central…
PROCEDIMIENTO Y SISTEMA PARA SEPARAR PIEZAS DE FUNDICIÓN DE RACIMOS OBTENIDOS MEDIANTE PROCESOS DE FUNDICIÓN.
(20/06/2013) El procedimiento comprende la colocación del racimo en una primera zona de trabajo (z1), la obtención de una imagen del racimo mediante un primer sistema de visión artificial y su procesado, obtención de la orientación de las piezas de fundición y las coordenadas de los puntos de corte referenciados al sistema de referencia espacial (X, Y, Z) del primer sistema de visión artificial , conversión de las coordenadas de los puntos de corte y orientación de las piezas al sistema de referencia espacial (X',Y', Z') de un primer manipulador dispuesto en una segunda zona de trabajo (z2), determinación del ángulo de ataque para la separación de cada pieza de fundición y transmisión…
DISPOSITIVO DE GARRA PARA MANIPULACIÓN DE ELEMENTOS FLEXIBLES.
(05/07/2012) Dispositivo de garra para manipulación de elementos flexibles, acopiable a un brazo de robot a modo de efector final, que comprende un bastidor principal y una pluralidad de elementos de agarre acoplados en el bastidor principal mediante respectivos mecanismos de accionamiento (1 a-1f; 2a-2e; 3a- 3f; 4a-4g; 5a-5d; 6a-6g; 7a-7f; 8a-8e; 9a-9f) para agarrar un elemento flexible , caracterizado porque comprende al menos cuatro elementos de agarre para agarrar el elemento flexible ; al menos un elemento de agarre es un elemento de agarre multiposición independientemente desplazable, respecto de los demás elementos de agarre , en al menos una dirección paralela al plano definido por los demás elementos de agarre mediante un sistema de desplazamiento montado en el bastidor principal y en una dirección perpendicular (Z) a dicho plano mediante un…
(18/02/2011) Robot portátil.Previsto para realizar la fase de taladro en el proceso de ensamble de componentes aeronáuticos, para lo que éstos se fijan mediante útiles de precisión en una grada ; caracterizado por comprender una plataforma desplazable para ubicarla próxima a la grada , y en la que se incluye un manipulador ingrávido que soporta un bastidor dotado de una columna que soporta un cabezal de taladro desplazable en los tres ejes. Comprende medios de fijación del bastidor a la grada para realizar diferentes taladros cuando el bastidor está fijado a la grada mediante el gobierno de la cabeza de taladro mediante un control numérico.Incluye medios de reptado para desplazar el conjunto del bastidor y columna sobre la grada y permitir fijar el bastidor en una nueva posición para…
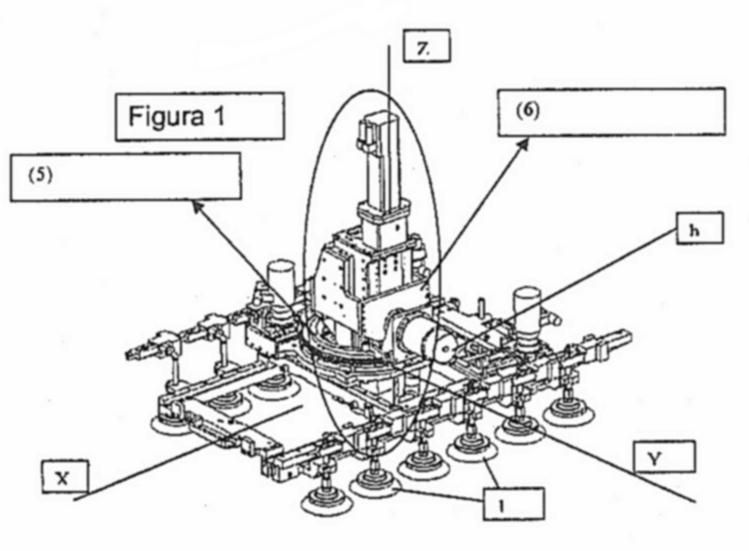
MAQUINA-HERRAMIENTA ROBOTIZADA PORTATIL.
Sección de la CIP Técnicas industriales diversas y transportes
(01/01/2008). Ver ilustración. Solicitante/s: FUNDACION FATRONIK. Clasificación: B23Q1/48, B62D57/02, B23Q9/00C5, B23Q9/00.
Máquina-herramienta robotizada portátil, que consta de un bastidor en el que se disponen una serie de ventosas para su fijación sobre una pieza a trabajar; un primer carro que se traslada en el bastidor según el eje X; un segundo carro que se traslada en el primer carro según el eje Y; una plataforma giratoria dispuesta en el segundo carro y que gira sobre el eje Z, siendo X, Y, Z ejes perpendiculares entre sí, dejando un espacio libre (e) pasante a través del bastidor , del primer carro y del segundo carro y de la plataforma giratoria ; un soporte basculante dispuesto sobre la plataforma giratoria y que gira sobre un eje secundario (b) situado en un plano perpendicular al eje Z; un cuarto carro que se traslada respecto al soporte basculante ; y un cabezal montado en el cuarto carro y portador de la herramienta de mecanizado.#De aplicación en máquina-herramienta.
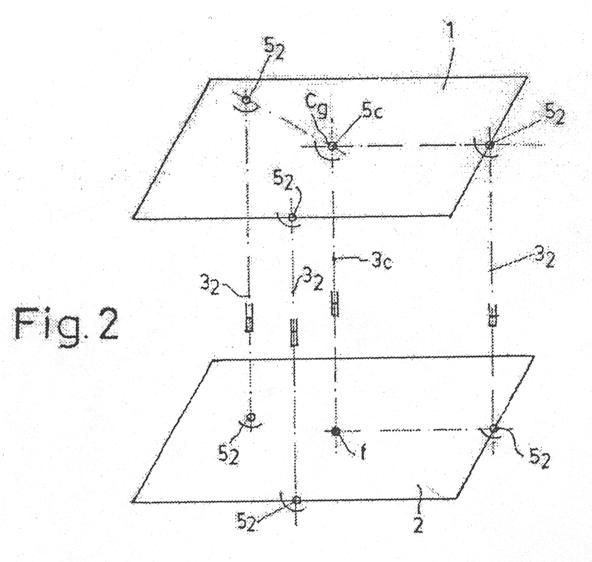
SEGUIDOR SOLAR BASADO EN CINEMATICA PARALELA.
Sección de la CIP Mecánica, iluminación, calefacción, armamento y voladura
(16/07/2007). Ver ilustración. Solicitante/s: FUNDACION FATRONIX. Clasificación: F24J2/54.
Seguidor solar basado en cinemática paralela, que consta de una plataforma fija ; una plataforma móvil portadora de paneles solares fotovoltaicos; un brazo central (3c) de longitud variable que se empotra por un extremo en la plataforma fija y se une por su otro extremo al centro geométrico (Cg) de la plataforma móvil por medio de una junta (5c) de dos grados de libertad; dos o tres brazos , de longitud variable que se unen por sus extremos a la plataforma fija y a la plataforma móvil por medio de juntas , de modo que si se utilizan dos brazos las juntas tengan al menos dos grados de libertad y si se utilizan tres brazos las juntas tengan tres grados de libertad.#Aplicable en la producción de energía eléctrica.
SISTEMA CINEMATICO PARA CABEZAL DE MAQUINA.
Sección de la CIP Técnicas industriales diversas y transportes
(16/03/2005). Solicitante/s: FUNDACION FATRONIK. Clasificación: B23Q1/48, B23Q1/54, B25J17/02, B23Q5/22.
Sistema cinemático para cabezal de máquina, que consta de: a) una primera plataforma a la que se fijan b) tres guías de deslizamiento con su deslizadera correspondiente, c) tres pares de brazos , que tienen una longitud constante, uniéndose cada brazo por un extremo mediante una junta esférica a una segunda plataforma cabezal y por el otro extremo mediante una junta esférica a una de dichas deslizaderas, uniéndose cada par de brazos a la misma deslizadera, caracterizado porque d) los seis brazos no tienen todos la misma longitud.
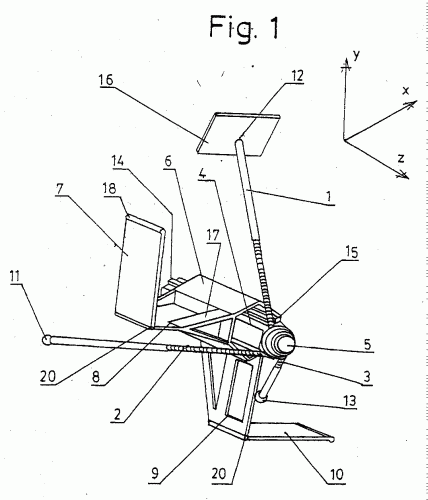
MANIPULADOR PARALELO PROVISTO DE UN MECANISMO PASICO DE GUIA.
Sección de la CIP Técnicas industriales diversas y transportes
(01/06/2004). Ver ilustración. Solicitante/s: FATRONIK SYSTEM, S.A. Clasificación: B25J17/02.
Módulo con movimiento cinemático paralelo de ejes ortogonales, consta de: a) una estructura fija ; b) una estructura pasiva que consta de, al menos, una tijera cinemática , con una unión por un extremo a la estructura fija y, por el otro extremo, con una unión a una estructura móvil plana , siendo articulada una de dichas uniones; c) una estructura móvil espacial portadora del cabezal de trabajo y que puede desplazarse linealmente respecto a la estructura móvil plana; d) unos brazos con una unión por un extremo a la estructura fija y, por el otro extremo, con una unión a la estructura móvil espacial , siendo una de las uniones de dos grados de libertad y la otra unión de tres grados de libertad; e) medios para accionar el movimiento de los brazos.
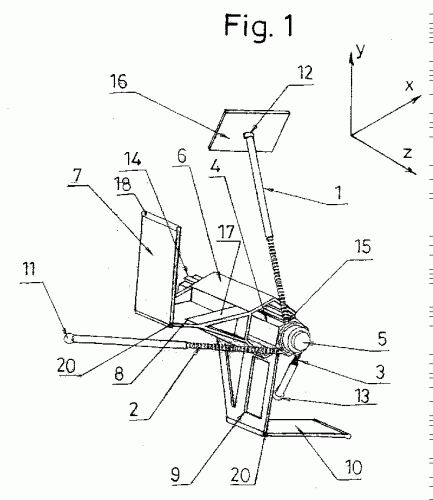
MODULO CON MOVIMIENTO CINEMATICO PARALELO DE EJES ORTOGONALES.
Sección de la CIP Técnicas industriales diversas y transportes
(16/12/2003). Ver ilustración. Solicitante/s: FUNDACION FATRONIK. Clasificación: B25J17/02.
Módulo con movimiento cinemático paralelo de ejes ortogonales que consta de una estructura fija o bancada, una estructura pasiva con, al menos, una tijera cinemática unida por uno de sus extremos a la estructura fija y por el otro extremo a una estructura móvil plana, siendo articulada una de dichas uniones; y una estructura móvil espacial portadora del cabezal de trabajo y que puede desplazarse linealmente respecto a la estructura móvil plana; y unos brazos con una unión por un extremo a la estructura fija y por el otro extremo con una unión a la estructura móvil espacial, siendo una de las uniones de dos grados de libertad y la otra unión de tres grados de libertad; y medios para accionar el movimiento de los brazos. De aplicación en máquinas herramientas.
{kind=link}
{kind=link}
{kind=link}
{kind=link}