14 patentes, modelos y diseños de CENTRO TECNOLOGICO ROBOTIKER
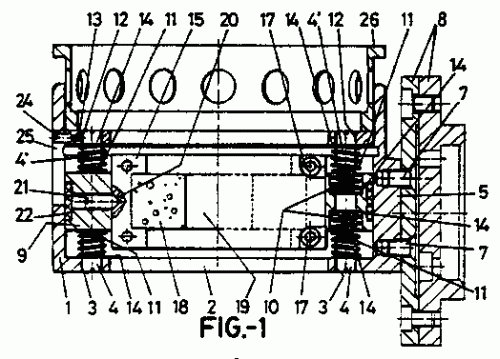
AMORTIGUADOR DE VIBRACIONES PARA HERRAMIENTA DE ROBOT.
Sección de la CIP Técnicas industriales diversas y transportes
(16/01/2001). Ver ilustración. Inventor/es: APARICIO RODRIGUEZ,JOSE MARIA, IDIGORAS LEIBAR,IGONE, DORRONSORO MENDIGUREN,MIGUEL. Clasificación: B25J19/00.
Amortiguador de vibraciones para herramienta de robot. El amortiguador se constituye a partir de un cuerpo de soporte , a modo de cazoleta, que es fijable al brazo de un robot. Interiormente cuenta con medios elásticos debidamente guiados y apoyados en rehundidos previstos en ambas caras de una pieza anular , la cual está montada libremente en el interior del cuerpo . Concéntricamente a la pieza existe una pieza formada por dos mitades entre las que queda situado un taco circular de goma con un paso axial para el amarre, mediante el apriete de ambas mitades, de la herramienta correspondiente. Los elementos elásticos y las piezas internas al cuerpo quedan retenidas en el interior de éste mediante una tapa cuyo apriete es variable para poder regular el tensado de los elementos elásticos . El amortiguador obtenido absorbe las vibraciones transmitidas por la herramienta acoplada, evitando que las mismas lleguen al brazo del robot en el que es aplicable el conjunto. Figura 1.
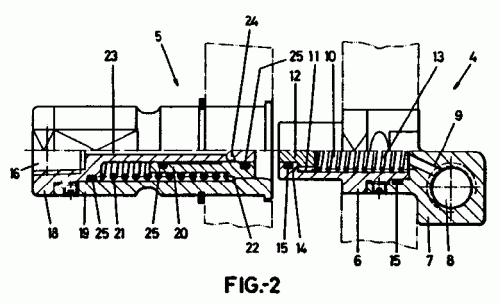
DISPOSITIVO DE CAMBIO AUTOMATICO DE GARRA DE ROBOT CON TRANSMISION HIDRAULICA.
Sección de la CIP Técnicas industriales diversas y transportes
(16/01/2001). Ver ilustración. Inventor/es: APARICIO RODRIGUEZ,JOSE MARIA, DORRONSORO ENDIGUREN,MIGUEL, IDIGORAS LEIBAR,IGONE. Clasificación: B25J15/04.
Dispositivo de cambio automático de garra de robot con transmisión hidráulica. El dispositivo forma parte de un acoplamiento por enchufe rápido de la garra que porta la herramienta al brazo de un robot, estando constituido por dos piezas y , dotadas de correspondientes orificios y de enchufe de los conductos de alimentación hidráulica del brazo del robot y de la herramienta acoplada en aquel, contando además esas piezas y con respectivas piezas móviles y desplazables axialmente y que obturan en posición de reposo los correspondientes extremos de tramos y que dan continuidad a los conductos que comunican, en cada pieza, con los orificios de conexión y , de manera que en el enfrentamiento y acoplamiento entre ambas piezas y se produce el retraimiento de las piezas móviles y y la comunicación de los tramos de conducto y , estableciéndose un paso de fluido entre los orificios de entrada y de salida . Figura 2.
ACOPLAMIENTO, CON RIGIDEZ VARIABLE, PARA HERRAMIENTA DE ROBOT.
Sección de la CIP Técnicas industriales diversas y transportes
(01/12/2000). Ver ilustración. Inventor/es: APARICIO RODRIGUEZ,JOSE MARIA, IDIGORAS LEIBAR,IGONE, DORRONSORO MENDIGUREN,MIGUEL. Clasificación: B25J18/06.
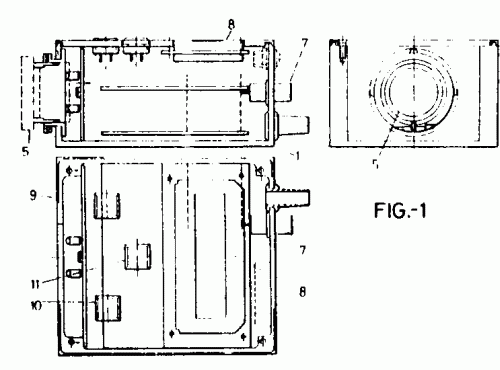
Acoplamiento, con rigidez variable, para herramienta de robot. El Acoplamiento está constituido por un cuerpo tubular de naturaleza elástica, cuyos extremos 0 embocaduras se cierran mediante sendas bridas y para el montaje de la correspondiente herramienta y del brazo del robot, respectivamente, y en cuyo interior se inyecta un fluido, cuya presión puede variarse a voluntad, de tal manera que en los desplazamientos y posicionamientos del brazo del robot, la presión del citado fluido difiera de la aplicada durante las operaciones de trabajo del robot. Este cuerpo tubular se complementa, opcionalmente, con un elemento retenedor envolvente helicoidal que evita las deformaciones excesivas de aquel cuando en el interior de la cámara que constituye el mismo se inyecta aire u otro fluido a presión. Figura 1.
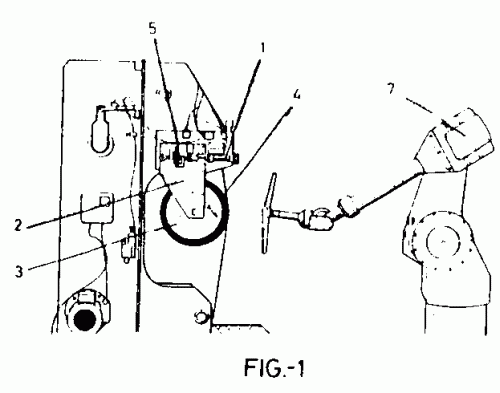
SISTEMA PARA ACABADO SUPERFICIAL DE PIEZAS CON CONTROL ACTIVO DE ESFUERZOS.
Sección de la CIP Técnicas industriales diversas y transportes
(16/02/2000). Ver ilustración. Inventor/es: GARCIA-TEJEDOR PEREZ,JAVIER, IDIGORAS LEIBAR,IGONE. Clasificación: B24B49/16, B24B21/20.
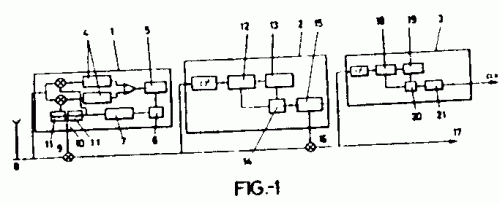
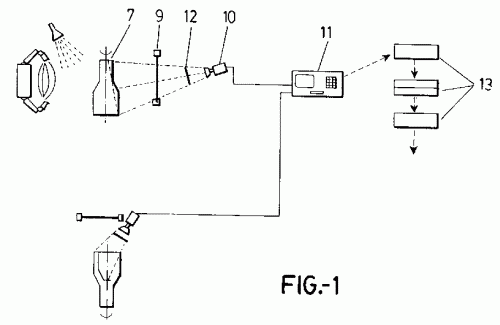
Sistema para acabado superficial de piezas con control activo de esfuerzos. En este sistema la fuerza ejercida sobre la pieza a pulir por la rueda o banda abrasiva es debida a la presión generada en las cámaras de un cilindro neumático que gobernado por una servoválvula , acciona el eje de traslación de la rueda , utilizándose además una célula de carga , colocada paralelamente a la dirección normal a la superficie de contacto entre pieza y banda, para recoger, en tiempo real, los valores de la fuerza ejercida por la rueda o banda sobre la pieza, enviándose estos valores a un sistema de control , basado en microprocesador, y provisto de los algoritmos de control adecuados para calcular las desviaciones existentes respecto de los valores teóricos y generar, en consecuencia, los valores de actuación sobre la citada servoválvula . Figura 1.
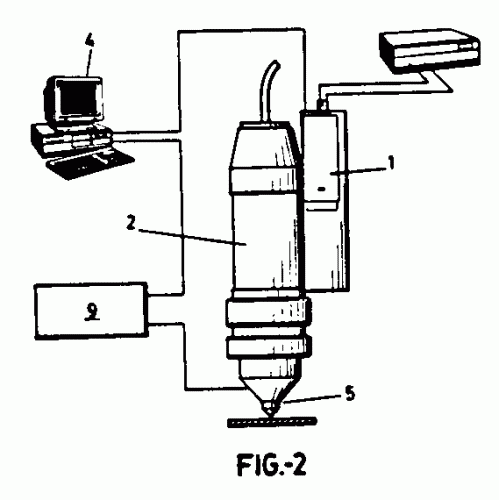
DISPOSITIVO PERFECCIONADO PARA FACILITAR LAS OPERACIONES DE PROGRAMACION DE ROBOTS.
Sección de la CIP Técnicas industriales diversas y transportes
(01/08/1999). Ver ilustración. Inventor/es: DORRONSORO MINDIGUREN, MIGUEL. Clasificación: B25J9/16, B23K26/04.
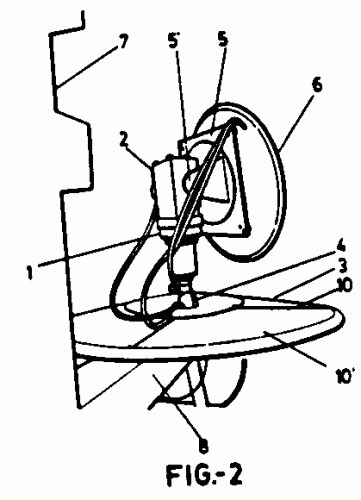
DISPOSITIVO PERFECCIONADO PARA FACILITAR LAS OPERACIONES DE PROGRAMACION DE ROBOTS. EL SISTEMA ES DE APLICACION EN ROBOTS PARA TRABAJOS DE ACABADO DE PIEZAS MEDIANTE LASER Y ESTA COMPUESTO POR UNA CAMARA CCD Y UN SISTEMA DE ILUMINACION MONTADOS DE FORMA PERMANENTE A LA ANTORCHA DE FOCALIZACION ACOPLADA AL BRAZO DEL ROBOT, DISPONIENDOSE LA CAMARA PARALELAMENTE A LA ANTORCHA, MIENTRAS QUE EL SISTEMA DE ILUMINACION, SE DISPONE PERPENDICULARMENTE A LA CITADA CAMARA, DEBIENDO, POR ELLO, MONTARSE UN DIVISOR DE HAZ, ASI COMO ESPEJOS Y LENTES, CONVENIENTEMENTE ORIENTADOS PARA QUE LA LUZ EMITIDA POR EL SISTEMA DE ILUMINACION PASE POR LA BOQUILLA DE LA ANTORCHA ILUMINANDO LA ZONA DE TRABAJO Y RECONDUCIENDO LA IMAGEN HASTA LA CAMARA A TRAVES DE LA PROPIA OPTICA DEL LASER DEL ROBOT. FIGURA 2.
SISTEMA DE TRANSMISION DE DATOS CON ESPECTRO EXTENDIDO A TRAVES DE LA RED ELECTRICA.
Sección de la CIP Electricidad
(01/06/1999). Ver ilustración. Inventor/es: ARIZAGA ARCELUS, IÑIGO, URIBE MUÑIZ, AITOR. Clasificación: H04B1/69, H04B3/54.
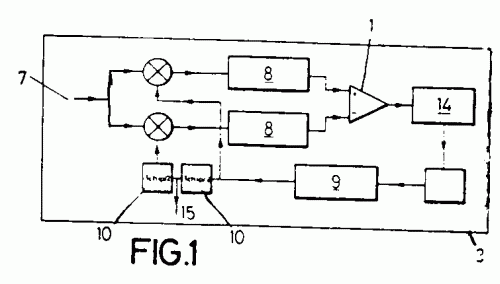
SISTEMA DE TRANSMISION DE DATOS CON ESPECTRO EXTENDIDO A TRAVES DE LA RED ELECTRICA. ESTE SISTEMA UTILIZA PARA LA GENERACION DE LOS DATOS, CODIGO Y PORTADORA EN EL EMISOR, RELOJES SINCRONIZADOS OBTENIDOS POR DIVISIONES SUCESIVAS DE UN UNICO OSCILADOR PATRON, REALIZANDOSE EN EL RECEPTOR LA SINCRONIZACION DE CODIGO, PORTADORA Y LA TEMPORIZACION DE BIT EN UNA UNICA OPERACION. PARA ELLO, EL CIRCUITO DE SINCRONIZACION DEL RECEPTOR UTILIZA COMO REFERENCIA LOCAL UNA SEÑAL COMPUESTA POR EL CODIGO SEUDOALEATORIO Y LA PORTADORA MULTIPLICADOS, CON LO QUE SE OBTIENE UNA FUNCION DE AUTOCORRELACION COMPLEJA QUE TIENE POR ENVOLVENTE LA FUNCION DE CORRELACION DEL CODIGO Y QUE PRESENTA UNA SERIE DE LOBULOS O PICOS. EL SEGUIMIENTO DE LA SEÑAL RECIBIDA SE REALIZA UTILIZANDO CINCO SEÑALES DE REFERENCIA, COMPUESTAS POR CODIGO Y PORTADORA DESFASADAS ENTRE SI, UNA PARA DEMODULAR, DOS PARA EL ENGANCHE DEL BUCLE Y OTRAS DOS PARA EL CIRCUITO DE ESTIMACION DE MAXIMO QUE PERMITE DETERMINAR SI EL LOBULO DE ENGANCHE ES EL PRINCIPAL.
CIRCUITO PERFECCIONADO PARA EL SEGUIMIENTO DE SEÑALES DE ESPECTRO EXTENDIDO.
Sección de la CIP Electricidad
(16/05/1999). Ver ilustración. Inventor/es: ARIZAGA ARCELUS, IÑIGO, RODRIGUEZ DAGANZO, FRANCISCO J. Clasificación: H04B1/69, H03L7/00.
ESTE CIRCUITO INCORPORA UNA BOMBA DE CARGA QUE ATACA LA ENTRADA DE CONTROL DEL VCO, ESTANDO LA CITADA BOMBA DE CARGA COMPUESTA POR DOS GENERADORES DE CORRIENTE QUE INYECTAN O EXTRAEN CORRIENTE EN UN CONDENSADOR, DE TAL MANERA QUE EL CONDENSADOR APLICA SU TENSION A LA ENTRADA DEL VCO, TRANSFORMANDO LAS VARIACIONES PRODUCIDAS EN SU CARGA EN VARIACIONES EN TENSION DEL VCO Y, POR TANTO EN LA FRECUENCIA GENERADA POR ESTE.
PROCEDIMIENTO DE DESMONTAJE ROBOTIZADO DE APARATOS ELECTRICOS Y HERRAMIENTA CORRESPONDIENTE.
Secciones de la CIP Técnicas industriales diversas y transportes Física
(01/05/1999). Ver ilustración. Inventor/es: APARICIO RODRIGUEZ,JOSE MARIA, IDIGORAS LEIBAR,IGONE, DORRONSORO MENDIGUREN,MIGUEL. Clasificación: B25B27/14, G05B19/18, B26D5/12, B26D5/10.
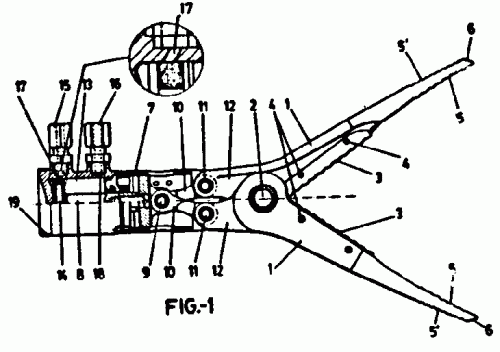
EL PROCEDIMIENTO CONSISTE EN SEPARAR LOS COMPONENTES O PIEZAS DEL APARATO ELECTRICO QUE SE PRETENDE DESMONTAR, SIN NECESIDAD DE DESATORNILLADO O DESTRUCCION DE LAS UNIONES ENTRE DICHOS COMPONENTES, UTILIZANDO PARA ELLO UNA HERRAMIENTA CONSTITUIDA POR DOS BRAZOS ARTICULADOS ENTRE SI A MODO DE TIJERA, CON CUCHILLAS DE CORTE EN SUS CARAS INTERNAS Y CON UNAS PROLONGACIONES POSTERIORES EN LAS QUE ARTICULAN SENDAS BIELAS CON UNA ARTICULACION COMUN , ESTANDO ESAS BIELAS VINCULADAS A UN PISTON DE DOBLE EFECTO MONTADO SOBRE UNA CARCASA , DE MANERA QUE EL DESPLAZAMIENTO EN UNO U OTRO SENTIDO DEL PISTON LLEVA CONSIGO EL BASCULAMIENTO DE LAS BIELAS Y POR LO TANTO EL CIERRE Y/O APERTURA DE LOS BRAZOS PARA EFECTUAR LA OPERATIVA DE DESMONTAJE CORRESPONDIENTE.
(01/03/1999) ESCANER TRIDIMENSIONAL. ESTA ESTRUCTURADO A BASE DE UN FOCO EMISOR DE LUZ , MATERIALIZADO EN UNO O VARIOS LASER DE DIODO DE ESTADO SOLIDO QUE GENERAN UNA LUZ COHERENTE Y MONOCROMATICA, COLABORANDO CON ESTE FOCO DOS MICROCAMARAS (2-2') SUSTANCIALMENTE DISTANCIADAS ENTRE SI Y QUE RECIBEN INDEPENDIENTEMENTE LA LUZ REFLEJADA SOBRE LA ZONA A INSPECCIONAR DE LA PIEZA O ELEMENTO EN CUESTION, DE MANERA QUE EN CONDICIONES NORMALES EL ORDENADOR QUE TRATA LA INFORMACION CAPTADA POR LAS MICROCAMARAS (2-2') INTERPOLA LOS DATOS DE UNA Y OTRA, CON LO QUE LOS POSIBLES ERRORES DE CAPTACION RESULTAN PROMEDIADOS, MIENTRAS QUE CUANDO UNA DE DICHAS CAMARAS RESULTA INOPERANTE POR QUEDAR…
CAMARA LINEAL INTELIGENTE.
Secciones de la CIP Física Técnicas industriales diversas y transportes Electricidad
(16/12/1998). Ver ilustración. Inventor/es: GARCIA-TEJEDOR PEREZ,JAVIER, IBAÑEZ EREÑO, PEDRO. Clasificación: G01B11/00, G01N21/84, G06M3/00, B65B57/20, H04N5/30.
CAMARA LINEAL INTELIGENTE. LA CAMARA INCORPORA UN SENSOR OPTICO PARA LA CAPTACION DE IMAGENES, UN MICROCONTROLADOR , UN VISUALIZADOR ALFANUMERICO Y UN TECLADO, CONECTANDOSE EL SENSOR OPTICO DIRECTAMENTE AL MICROCONTROLADOR SIN NECESIDAD DE ACONDICIONAR LA SEÑAL ANTES DEL TRATAMIENTO DIGITAL DE LA MISMA Y UTILIZANDOSE ESTE MISMO MICROCONTROLADOR PARA EL PROCESADO DE LOS DATOS RECIBIDOS O ENVIADOS POR EL VISUALIZADOR Y EL TECLADO, CONSTITUYENDO ASI UN SISTEMA DE INSPECCION COMPLETO DE REDUCIDO TAMAÑO Y FACIL INSTALACION, QUE PERMITE, A TRAVES DEL TECLADO INCORPORADO, REALIZAR AJUSTES DE PARAMETROS, SELECCION DE MODOS OPERATIVOS Y/O DE FUNCIONES A REALIZAR POR LA CAMARA.
SISTEMA DE TELEPOSICIONAMIENTO DE ANTENAS REPETIDORAS DE TELEVISION.
Sección de la CIP Electricidad
(01/08/1998). Ver ilustración. Inventor/es: SEVILLANO IZARRA,JOSE LUIS, RENTERIA BILBAO, ARANTXA. Clasificación: H01Q1/12, H01Q3/08.
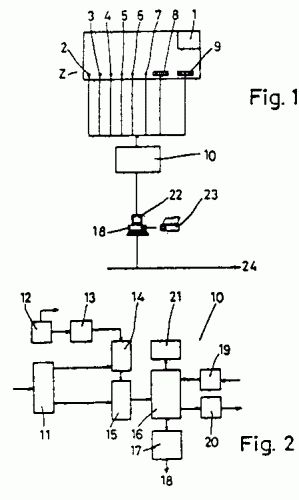
SISTEMA DE TELEPOSICIONAMIENTO DE ANTENAS REPETIDORAS DE TELEVISION. EL SISTEMA UTILIZA PARA EL MOVIMIENTO DE LAS ANTENAS UN POSICIONADOR MECANICO CON DOS MOTORES DE ACCIONAMIENTO REMOTO, DISPONIENDOSE LOS CITADOS MOTORES DE TAL MANERA QUE EL EJE DEL MOTOR QUEDE FIJADO VERTICALMENTE A UN CASQUILLO SITUADO EN EL CENTRO DE UN PLATO SOPORTE HORIZONTAL PARA PERMITIR UN GIRO HORIZONTAL COMPLETO DE LOS DOS MOTORES , AMARRANDOSE LA ANTENA , MEDIANTE UN SOPORTE , AL EJE DE SALIDA DEL MOTOR PARA PERMITIR UN GIRO VERTICAL DE LA ANTENA DE 180, ESTANDO EL MOVIMIENTO DE AMBOS MOTORES CONTROLADO POR UN SISTEMA LOCAL , SITUADO EN LAS PROXIMIDADES DE LA TORRETA Y HABIENDOSE PREVISTO LA COLOCACION, EN CADA UNA DE LAS ANTENAS REPETIDORAS, DE UN SISTEMA LOCAL , Y LA CONEXION DE TODOS ELLOS, MEDIANTE MODEMS, CON UN SISTEMA CENTRAL DE TELEMANDO SITUADO EN EL CENTRO DE EMISION.
PROCEDIMIENTO Y MAQUINA PARA DETECCION AUTOMATICA DE GRIETAS EN PIEZAS FERRICAS.
Sección de la CIP Física
(01/07/1998). Ver ilustración. Inventor/es: GARCIA TEJEDOR, JAVIER. Clasificación: G01N21/64, G01N21/88.
PROCEDIMIENTO Y MAQUINA PARA DETECCION AUTOMATICA DE GRIETAS EN PIEZAS FERRICAS. CONSISTE EN DISPONER EN EL INTERIOR DE UNA CABINA DE INSPECCION DE PIEZAS UNA LUZ ULTRAVIOLETA , UNA CAMARA CCD Y LA PIEZA A EXAMINAR , ESTA CAMARA SENSIBLE A LA LUZ EMITIDA POR LAS PARTICULAS MAGNETICAS DEPOSITADAS EN LAS GRIETAS DE LA PIEZA, DEBIENDOSE PARA ELLO ORIENTAR CONVENIENTEMENTE LA CAMARA , UTILIZANDOSE ASI MISMO UNO O VARIOS FILTROS OPTICOS PARA ELIMINAR LA LUZ ULTRAVIOLETA Y OTROS RUIDOS. LAS IMAGENES CAPTADAS SE ENVIAN A UN SISTEMA INFORMATICO PARA SU PROCESADO AUTOMATICO Y DETECCION DE LA GRIETA.
SISTEMA PARA EL CONTROL AUTOMATICO DE LA CALIDAD EN LAS SOLDADURAS.
Sección de la CIP Técnicas industriales diversas y transportes
(01/06/1998). Ver ilustración. Inventor/es: GARCIA-TEJEDOR PEREZ,JAVIER, VILLATE MARTINEZ, JOSE LUIS, IBAÑEZ EREÑO, PEDRO. Clasificación: B23K9/095, B23K9/10, B23K9/12.
SISTEMA PARA EL CONTROL AUTOMATICO DE LA CALIDAD EN LAS SOLDADURAS, QUE CONSTA, EN CADA PUESTO DE SOLDADURA, DE UNA SERIE DE SENSORES ASOCIADOS A LAS VARIABLES A CONTROLAR QUE INTERVIENEN EN EL PROCESO DE SOLDADURA, QUE ENVIAN SUS SEÑALES A UN MODULO DE CAPTURA DE DATOS QUE CONSTA DE UN FILTRO ADAPTADOR DE DICHAS SEÑALES Y UN MICROPROCESADOR QUE LAS PRE-PROCESA, LAS CONVIERTE EN DIGITALES Y LAS FILTRA ENVIANDOLAS A UN PROCESADOR PROGRAMADO CON LOS PARAMETROS POR LOS QUE SE HAN DE REGIR DICHAS VARIABLES Y PARA TOMAR LAS CORRESPONDIENTES DECISIONES. DE APLICACION EN LA INDUSTRIA DE LA SOLDADURA.
CAMARA COMPACTO PARA VISION NOCTURNA.
(01/05/1997) 1. CAMARA COMPACTA PARA VISION NOCTURNA, QUE ESTANDO PREVISTA PARA CAPTAR IMAGENES TANTO DE DIA COMO DE NOCHE, SIN NECESIDAD DE SISTEMAS DE ILUMINACION CONVENCIONALES, TODO ELLO PERMITIENDO CONTROLAR EL ACCESO Y/O PASO DE PERSONAS O VEHICULOS, ASI COMO LEER LA MATRICULA DE ESTOS DURANTE LA NOCHE, SIN QUE SEA DETECTADO POR EL OJO HUMANO, ESENCIALMENTE SE CARACTERIZA PORQUE EN EL INTERIOR DE UNA CARCASA SE INCLUYE UN SISTEMA DE CAPTACION DE IMAGENES Y UN SISTEMA DE ILUMINACION NECESARIO PARA TODO TIPO DE INSPECCIONES NOCTURNAS, ESTANDO EL SISTEMA DE CAPTACION DE IMAGENES CONSTITUIDO POR UNA CAMARA CONVENCIONAL CON SU CORRESPONDIENTE OBJETIVO, MIENTRAS QUE EL SISTEMA DE ILUMINACION ESTA CONSTITUIDO POR UNA PLACA DE CIRCUITO IMPRESO SOBRE CUYA CARA FRONTAL VAN DISPUESTOS UNA PLURALIDAD DE LEDS DE ILUMINACION INFRARROJA; CON LA PARTICULARIDAD DE QUE SOBRE…
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}