CIP-2021 : B63G 8/16 : por empleo directo de hélices o de sistemas a reacción.
CIP-2021 › B › B63 › B63G › B63G 8/00 › B63G 8/16[2] › por empleo directo de hélices o de sistemas a reacción.
Notas[t] desde B60 hasta B66: TRANSPORTES O MANUTENCION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS.
B63G INSTALACIONES OFENSIVAS Y DEFENSIVAS EN LOS BUQUES; COLOCACION DE MINAS; DRAGADO DE MINAS; SUBMARINOS; PORTAAVIONES (medios de ataque o de defensa en general, p. ej. torretas, F41H).
B63G 8/00 Embarcaciones sumergibles, p. ej. submarinos (cascos de submarinos B63B 3/13; cámaras de buceo unidas mecánicamente a una base, p. ej. mediante un cable B63C 11/34; artefactos automotores de buceo B63C 11/46; torpedos F42B 19/00).
B63G 8/16 · · por empleo directo de hélices o de sistemas a reacción.
CIP2021: Invenciones publicadas en esta sección.
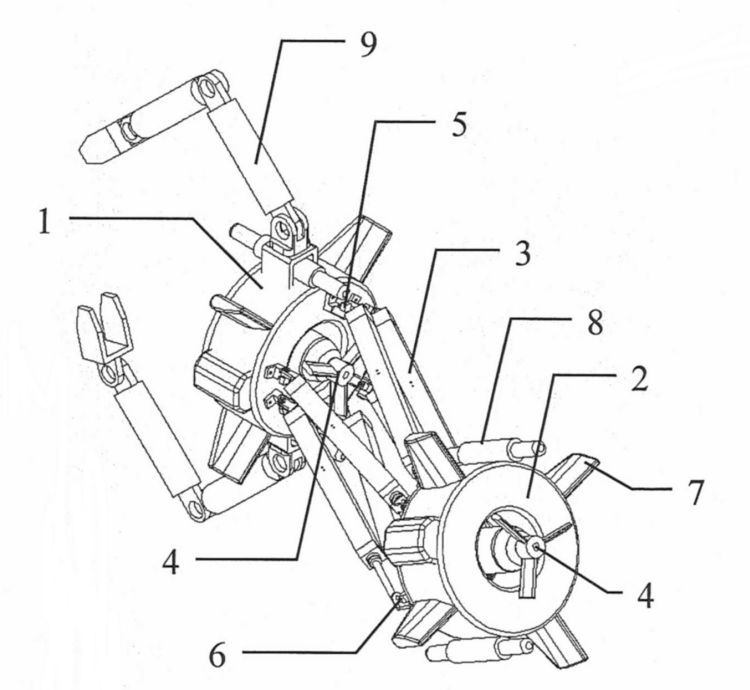
SISTEMA DE AJUSTE DE MOTORES PARA VEHÍCULOS SUBMARINOS DE OPERACIÓN REMOTA PARA APROVECHAMIENTO DE EMPUJE DE MOTORES.
(16/07/2020). Solicitante/s: UNIVERSIDAD SIMÓN BOLIVAR. Inventor/es: ABRIL HOWARD,Omar Santiago, VILLAREAL GONZALEZ,Reynaldo Farid, PESTANA NOBLES,Juan Pablo, OCHOA PERTUZ,Carlos Andres, RODRIGUEZ,Eugenio Yime.
La presente invención pertenece al campo de buques u otras embarcaciones flotantes, sus equipos y medios de localización o recuperación de objetos sumergidos; específicamente relacionado con un equipo para permanecer bajo el agua, los medios para buscar objetos sumergidos con cámaras de buceo unidas mecánicamente a una base de tipo cerrado con control independiente de propulsión y de dirección que consiste en un submarino tipo Vehículo Operado Remotamente (ROV - Remote Operated Vehicle) con seis motores: cuatro motores con empuje en el eje horizontal y dos motores con empuje el eje vertical; donde los motores de empuje horizontal cuentan giran sobre un eje en un ángulo de 0 a 45 grados y donde los motores están ubicados en una estructura adicional que permite el giro y bloqueo de los motores según el ecosistema o las condiciones ambientales a las cuales el Vehículo Operado Remotamente va a ser expuesto).
Dispositivo propulsor submarino para vehículo submarino.
(22/05/2019) Un dispositivo propulsor submarino adaptado para funcionar en un líquido (W) que comprende:
- un estátor que comprende bobinas circunferenciales en serie y que está adaptado para generar un campo electromagnético controlado a lo largo de una dirección axial,
- un rotor propulsor sin eje que comprende:
- al menos dos placas magnetizadas en forma de anillo, respectivamente, una placa magnetizada superior y una placa magnetizada inferior , coaxialmente separadas a lo largo de dicha dirección axial y perpendiculares a la misma, de manera que dichas bobinas circunferenciales en serie quedan entre ellas, definiendo cada placa una abertura central…
Vehículo submarino no tripulado.
(11/04/2018) Un vehículo submarino no tripulado "UUV" , que comprende:
un cuerpo ; y
un sistema de propulsión para impulsar y orientar el UUV , comprendiendo el sistema de propulsión :
una entrada formada en el cuerpo que facilita que el fluido sea introducido en el UUV desde el exterior del cuerpo ,
un conducto (123a) en comunicación de fluido con la entrada, estando el conducto (123a) adaptado para dirigir el fluido a lo largo de una trayectoria de flujo (124a),
una bomba (125a) operable con el conducto (123a) para aumentar la velocidad del fluido, y
una boquilla (121a) en comunicación de fluido con el conducto (123a) para recibir el…
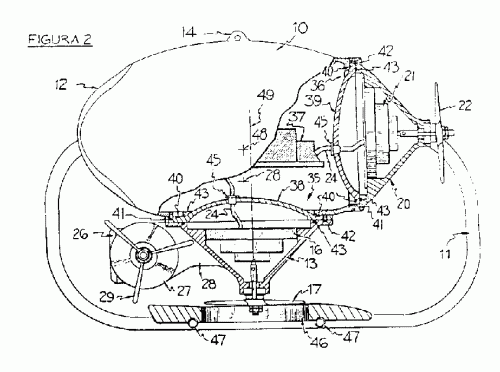
MEJORAS EN LA PATENTE PRINCIPAL P200201666 "ROBOT PARALELO TREPADOR Y DESLIZANTE PARA TRABAJOS EN ESTRUCTURAS Y SUPERFICIES".
(16/07/2007). Ver ilustración. Solicitante/s: UNIVERSIDAD POLITECNICA DE MADRID
UNIVERSIDAD POLITECNICA DE CARTAGENA. Inventor/es: SALTAREN PAZMIO,ROQUE JACINTO, LOPEZ CORONADO,JUAN, ARACIL SANTONJA, RAFAEL.
Mejoras en la patente principal P200201666 "robot paralelo trepador y deslizante para trabajos en estructuras y superficies".#La presente invención se refiere a un robot submarino de estructura paralela consistente en la mejora o desarrollo de la patente principal P200201666 "robot paralelo trepador y deslizante para trabajos en estructuras y superficies" a la navegación teleoperada bajo el agua. El desarrollo que se presenta consiste en adosar a cada anillo del robot y las aletas para el control de la estabilidad y la navegación bajo el agua. El robot submarino, dispone de motores impulsores que van ensamblados en los anillos y y que le permiten propulsarse, así como brazos manipuladores más un sistema de control por computador alojado en los anillos y.
(16/09/1998). Solicitante/s: STN ATLAS ELEKTRONIK GMBH. Inventor/es: MESSMER, LUDWIG.
LA INVENCION SE REFIERE A UN VEHICULO SUBMARINO, EN PARTICULAR REMOLCADOR SUBMARINO, CON UN EQUIPO DE ACCIONAMIENTO, QUE ABARCA UNA MULTIPLICIDAD DE MEDIOS DE ACCIONAMIENTO QUE ACTUAN EN UNA DIRECCION DE ACCIONAMIENTO PREVIAMENTE DADA, Y CON UN EQUIPO PARA LA DIRECCION DEL VEHICULO SUBMARINO. LA INVENCION DISPONE PARA ELLO, QUE EL EQUIPO SE COMPONGA DE UN EQUIPO DE CONTROL PARA LA DIRECCION DEL VEHICULO SUBMARINO, QUE CONTROLA DE FORMA INDIVIDUAL LA POTENCIA DE ACCIONAMIENTO DEL LOS MEDIOS DE ACCIONAMIENTO DE IMPULSION.
VEHICULO SUBMARINO AUTOPROPULSADO CONTROLADO A DISTANCIA.
(01/07/1989). Ver ilustración. Solicitante/s: REMOTELY OPERATED VEHICLES LIMITED. Inventor/es: KNEEBONE, EDWARD W. S.
UN VEHICULO SUBMARINO AUTOPROPULSADO CONTROLADO A DISTANCIA, QUE TIENE UN CUERPO PRINCIPAL HERMETICAMENTE CERRADO Y MEDIOS DE CONTROL DENTRO DEL CUERPO PRINCIPAL SUSCEPTIBLES DE SER ACCIONADOS EN RESPUESTA A SEÑALES DE CONTROL RECIBIDAS A TRAVES DE UN CABLE PARA SUMINISTRAR SELECTIVAMENTE LA ENERGIA ELECTRICA RECIBIDA A TRAVES DE DICHO CABLE A MOTORES ELECTRICOS . CADA MOTOR ELECTRICO ESTA MONTADO EN UN ALOJAMIENTO DE MOTOR UNIDO DE MANERA SEPARABLE AL CUERPO PRINCIPAL PARA PROPORCIONAR UN RECINTO HERMETICAMENTE CERRADO PARA EL MOTOR. UNOS CABLES DE INTERCONEXION PASAN EN RELACION HERMETICA DESDE EL CUERPO PRINCIPAL A CADA ALOJAMIENTO Y VAN CONECTADOS A LOS MOTORES ELECTRICOS RESPECTIVOS CONTENIDOS EN ELLOS.
{kind=link}
{kind=link}