CIP-2021 : B25J 3/02 : dotados de un acoplamiento en paralelogramo entre la unidad de control y la unidad controlada (pantógrafos B43L 13/00).
CIP-2021 › B › B25 › B25J › B25J 3/00 › B25J 3/02[1] › dotados de un acoplamiento en paralelogramo entre la unidad de control y la unidad controlada (pantógrafos B43L 13/00).
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 3/00 Manipuladores del tipo control dominado, es decir, manipuladores en los que la unidad de control y la unidad controlada ejecutan movimientos correspondientes en el espacio.
B25J 3/02 · dotados de un acoplamiento en paralelogramo entre la unidad de control y la unidad controlada (pantógrafos B43L 13/00).
CIP2021: Invenciones publicadas en esta sección.
Exoesqueleto robótico para movimiento de un miembro.
(23/07/2014) Un exoesqueleto robótico , que comprende: 5 una primera conexión mecánica adaptada para acoplarse a una primera unión seleccionada de un miembro de un sujeto, la primera conexión mecánica que incluye conexiones para dicho acoplamiento a la primera unión seleccionada, con al menos una unión que tiene articulación alrededor de un eje; y
medio de sujeción del miembro para sujetar el miembro a la conexión;
en donde la primera conexión mecánica define una unión virtual que tiene un eje que no se localiza en la conexión mecánica;
en donde la unión virtual se acopla a la primera unión seleccionada del miembro cuando el miembro se sujeta a la conexión;
en donde la primera conexión mecánica no se localiza en, o a lo largo de un eje de la primera unión seleccionada del miembro cuando la primera unión seleccionada…
APARATO MANIPULADOR DE CARGAS PERFECCIONADO.
(01/05/1990) APARATO MANIPULADOR DE CARGAS PERFECCIONADO, DE LOS QUE COMPRENDEN UN PEDESTAL GIRATORIO CAPAZ DE GIRAR 360G Y QUE TIENE UNIDA UNA PLUMA LA CUAL EN SU PLANO VERTICAL ES SUSCEPTIBLE DE ARTICULARSE ANGULARMENTE RESPECTO DEL PEDESTAL GIRATORIO Y ESTA ESTRUCTURADA A MODO DE PARALELOGRAMO ARTICULADO DEFORMABLE FORMADO MEDIANTE DOS PARALELAS BARRAS RADIALES, SUPERIOR (1A) E INFERIOR (1B), ARTICULADAS POR UN EXTREMO A DICHO PEDESTAL GIRATORIO Y POR EL OTRO EXTREMO A UNA BARRA SUSPENSORA (1C) ENCARGADA DEL HECHO MATERIAL DE SUSPENDER LA CARGA A MANIPULAR, CARACTERIZADO PORQUE LA RELACION MECANICA ENTRE LA PLUMA Y ELPEDESTAL GIRATORIO SE ESTABLECE MEDIANTE ARTICULACIONES…
PERFECCIONAMIENTOS EN LA CONSTRUCCION DE MAQUINAS PARA LA MANIOBRA SIMULTANEA DE GRUPOS DE BOTELLAS.
(16/07/1977). Solicitante/s: VALERA BERNABE, SALVADOR FEDERICO.
Resumen no disponible.
APARATO DE MANIOBRA PARA EL DESPLAZAMIENTO AXIAL DE ELEMENTOS DOTADOS DE PROYECCIONES MULTIPLES.
(16/02/1977). Solicitante/s: COMBUSTION ENGINEERING, INC..
Resumen no disponible.
UN APARATO PERFECCIONADO DE MANIPULACION DE CARGAS.
(16/02/1977). Solicitante/s: FORALKRANAR, A. B.
Resumen no disponible.
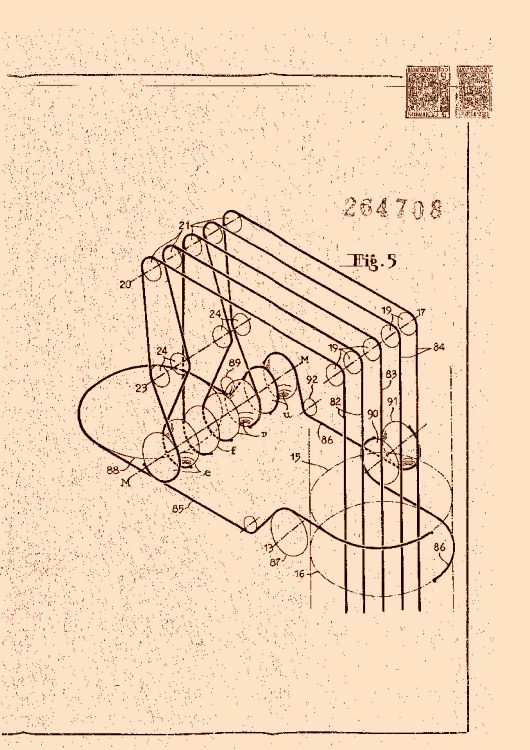
DISPOSITIVO MANIPULADOR MECÁNICO PARA EL DESPLAZAMIENTO DE OBJETOS EN UN MEDIORADIOACTIVO.
(16/04/1961). Ver ilustración. Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE.
Resumen no disponible.
{kind=link}