CIP-2021 : G01S 17/89 : para la cartografía o la formación de imágenes.
CIP-2021 › G › G01 › G01S › G01S 17/00 › G01S 17/89[2] › para la cartografía o la formación de imágenes.
G FISICA.
G01 METROLOGIA; ENSAYOS.
G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS.
G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar.
G01S 17/89 · · para la cartografía o la formación de imágenes.
CIP2021: Invenciones publicadas en esta sección.
Generación y detección de fotones entrelazados en frecuencia.
(27/11/2013) Un método que comprende:
utilizar un láser UV para generar un haz coherente;
convertir en sentido descendente el haz coherente para producir pares de fotones entrelazados en frecuencia;para cada par enlazado, enviar un primer fotón a lo largo de un primer trayecto (P1) y un segundo fotón a lolargo de un segundo trayecto (P2):
utilizar un primer detector para detectar aquellos fotones enviados a lo largo del primer trayecto, y unsegundo detector para detectar aquellos fotones enviados a lo largo del segundo trayecto, siendo ladetección realizada en un régimen de un solo fotón; y
realizar el cómputo de coincidencia sobre salidas de los detectores, incluyendo la comparación de los bordesdelanteros sobre las salidas del primer y segundo detectores dentro de una ventana de tiempo;
caracterizado…
Sistemas de guiado de atraque y de identificación de aeronaves.
(22/10/2013) Un sistema para determinar si un objeto detectado es un objeto conocido, el objeto conocido teniendo un perfilconocido y teniendo también una característica conocida en una localización conocida, el sistema comprendiendo:
medios de proyección para proyectar pulsos de luz sobre el objeto detectado;medios de recogida para recoger pulsos de luz reflejados desde el objeto detectado y para detectar una formadel objeto detectado de acuerdo con los pulsos de luz;
medios de comparación para comparar la forma detectada con un perfil que corresponde a la forma conocida ypara determinar si la forma detectada corresponde a la forma conocida; y
medios de identificación para identificar si el objeto detectado es el objeto conocido determinando si el objetodetectado…
Sistemas de guiado de atraque y de identificación de aeronaves.
(22/10/2013) Un sistema para determinar el ángulo de guiñada (g) de un objeto detectado, el sistema comprendiendo:
medios de proyección para proyectar pulsos de luz sobre el objeto detectado;
medios de recogida para recoger pulsos de luz reflejados desde el objeto detectado y para detectar una formadel objeto detectado según los pulsos de luz; y
medios de determinación de ángulos para determinar el ángulo de guiñada (g) a partir de la forma detectada por losmedios de recogida ;
en el que el objeto detectado comprende una nariz que tiene una punta de la nariz y un lado izquierdo y un ladoderecho con relación a la punta de la nariz, y en el que los medios de determinación de ángulos determinan elángulo de guiñada (g) a partir de una porción de la forma la cual es adyacente…
Sistemas de guiado de atraque y de identificación de aeronaves.
(08/05/2013) Un sistema para determinar si un vehículo está siguiendo una línea central, teniendo el vehículo una nariz y unarueda, comprendiendo el sistema:
un dispositivo de almacenamiento para almacenar (i) coordenadas que representan una trayectoria de la líneacentral y (ii) una distancia entre la nariz y la rueda,
un dispositivo de detección para detectar (i) una posición de la nariz y (ii) un ángulo de guiñada del vehículo, yun dispositivo de cálculo para calcular (i) una posición de la rueda, desde la posición de la nariz, el ángulo deguiñada detectado por el dispositivo de detección y la distancia almacenada en el dispositivo de almacenamiento, y(ii) un descentramiento de la rueda desde la línea central, a partir de las coordenadas almacenadas en el dispositivode almacenamiento y la posición de la rueda;
caracterizado…
Dispositivo para la detección de vehículos en una superficie de tráfico.
(23/04/2013) Dispositivo para la detección de vehículos en una superficie de tráfico , caracterizado por al menosdos cámaras de tiempo de vuelo que interactúan con correspondientes emisores luminosos para generardiferentes imágenes de distancia (E(t)) de la superficie de tráfico , estando conectadas las cámaras a undispositivo de evaluación común para la detección de vehículos en las imágenes de distancia (E(t)) y estandodispuestas por encima de la superficie de tráfico, estando diseñados los emisores luminosos para emitir una luzdiferente, detectable sólo por la cámara de tiempo de vuelo correspondiente en cada caso, y presentando lascámaras de tiempo de vuelo respectivamente campos visuales rectangulares…
Sistemas de guiado de atraque y de identificación de aeronaves.
(04/04/2013) Un sistema para determinar si una aeronave detectada es una aeronave conocida, teniendo la aeronave conocidaun perfil conocido y teniendo también características conocidas primera y segunda en localizaciones conocidas,comprendiendo el sistema:
medios de proyección para proyectar pulsos de luz sobre la aeronave detectada,medios de recogida para recoger pulsos de luz reflejados desde la aeronave detectada y para detectar unaforma de la aeronave detectada de acuerdo con los pulsos de luz,
medios de comparación para comparar la forma detectada con un perfil que corresponde a la forma conocida ypara determinar si la forma detectada corresponde a la forma conocida, y
medios de identificación para identificar si la aeronave detectada es la aeronave conocida determinando si laaeronave detectada…
SISTEMA PARA ESTUDIOS TOPOGRÁFICOS E INSPECCIÓN DE OBRAS.
(13/11/2012) Sistema para estudios topográficos e inspección de obras.
El sistema para estudios topográficos e inspección de obras comprende un vehículo aéreo provisto de una o más cámaras para tomar imágenes de un terreno u obra, y se caracterizado por el hecho de que dicho vehículo aéreo es un helicóptero no tripulado provisto de medios de navegación y guiado ; el sistema también comprende una unidad de control de tierra y medios de comunicación entre el helicóptero no tripulado y dicha unidad de control de tierra .
Además, dicho helicóptero no tripulado comprende por lo menos un emisor/receptor láser para definir las cotas y los perfiles de…
EQUIPO DE OBTENCIÓN DE INFORMACIÓN EN OBRAS E INFRAESTRUCTURAS BASADO EN UN VEHÍCULO AÉREO NO TRIPULADO.
(30/08/2012) Equipo de obtención de información en obras e infraestructuras basado en vehículo aéreo no tripulado, (UAV) que comprende, al menos:
(i) un vehículo aéreo no tripulado (UAV) que comprende medios para su control y operación desde tierra, medios de adquisición y medios de registro sincronizado de imágenes y datos; y
(ii) una estación en tierra (ET) comprendiendo, a su vez, un dispositivo de radio-control, y un computador para ayuda a la operación comprendiendo medios para la planificación, construcción y mantenimiento de obras e infraestructuras, incluyendo la geo-referenciación de las imágenes, la construcción de mapas en dos y tres dimensiones, y la obtención de medidas entre puntos y rasgos característicos.
SISTEMA DE DETECCION E IDENTIFICACION DE OBSTACULOS EN ENTORNO AEROPORTUARIO.
(07/08/2012) Sistema de detección e identificación de obstáculos en entorno aeroportuario, que consta de:
- un sistema de búsqueda de las zonas de ubicación preferente de las estaciones de seguimiento (ES);
- una estación de seguimiento (ES) programable por cada zona de ubicación preferente; y
- una plataforma de gestión (PG) programable dotada de un procesador central.
Fusión de datos de multisensores y de un lidar de absorción diferencial.
(13/06/2012) Un método de adquisición de datos utilizando múltiples sensores integrados en uno o varios vehículos, comprendiendo el método las etapas de:
(a) conectar un sensor DIAL multilínea para detectar uno o varios objetivos de interés, durante una primera pasada sobre una trayectoria preprogramada , en donde los objetivos incluyen fugas de gasoducto u oleoducto localizadas en zonas de interés (ROI);
(b) memorizar las posiciones de los objetivos detectados de la ROI en una tabla de consulta LUT informática;
(c) durante una segunda pasada sobre la ROI, activar la conexión de otro sensor en, o cerca de la posición memorizada en la (LUT); y
(d) confirmar la presencia de los objetivos detectados…
Procedimiento para la medición de tiempo de propagación de la luz.
(25/04/2012) Procedimiento para la medición del tiempo de propagación de la luz, especialmente para cámaras , con los pasos:
- emisión de una primera señal luminosa de al menos un emisor de luz , sincronizada por un primer control de reloj , a un trayecto de luz , a través de un objeto reflectante (O), hacia un fotodiodo ,
- determinación de una señal de recepción como consecuencia de la primera señal luminosa en el receptor ,
- acoplamiento de otra señal luminosa sincronizada por otro control de reloj y mezcla con la primera señal luminosa formando una señal de recepción (S13) común,
- filtrado de la señal de recepción (S13) común con un filtro , cuya respuesta de frecuencia corresponde a una…
(26/03/2012) Escáner de fibra óptica para la emisión y recepción de señales de luz, que comprende una matriz de conductores de luz individuales, cuyos primeros extremos están dispuestos en el plano de imagen de un sistema óptico de formación de imágenes , y cuyos segundos extremos están dispuestos de forma circular, un conductor de luz central , cuyo primer extremo está dispuesto en el centro de la estructura anular formada por los segundos extremos de la matriz de conductores de luz , un reflector accionado por motor, que está dispuesto de tal modo que la luz que sale de los extremos , dispuestos de forma circular, de la matriz de conductores de luz es guiada hacia el conductor de luz central , caracterizado porque el conductor de luz central está dividido en dos zonas coaxiales de sección transversal (120a, 120b), en que a través…
PROCEDIMIENTO DE ASISTENCIA AL PILOTO EN ATERRIZAJES DE HELICÓPTEROS EN VUELO VISUAL BAJO CONDICIONES DE BROWN-OUT O WHITE-OUT.
(03/02/2012) Procedimiento de asistencia al piloto en aterrizajes de helicópteros en vuelo visual bajo condiciones de brown-out o white-out, caracterizado porque se generan durante el vuelo de aproximación para el aterrizaje datos 3D del lugar de aterrizaje previsto por medio de un sensor 3D situado a bordo del helicóptero, con una resolución de al menos 0,5º y una tasa de datos superior a 20000 píxeles/s, se acumulan estos datos con ayuda de los datos de posición y situación del helicóptero para obtener una representación 3D del lugar de aterrizaje, y se establece continuamente a partir de esta representación 3D en la perspectiva correspondiente a la posición y situación actuales del helicóptero una visión exterior virtual que se le presenta al piloto, estando presente una…
PROCEDIMIENTO, PROGRAMA DE ORDENADOR Y ARCHIVO PARA GENERAR IMAGENES QUE REPRODUCEN UN ENTORNO TRIDIMENSIONAL REAL.
(30/08/2010) Procedimiento, programa de ordenador y archivo para generar imágenes que reproducen un entorno tridimensional real.
Procedimiento para la obtención a partir de un entorno tridimensional de la realidad, tal como un edificio arquitectónico, de un archivo de datos para generar imágenes que reproducen dicho entorno de forma bidimensional o tridimensional, particularmente aplicable para el registro de entornos arquitectónicos. En esencia el procedimiento comprende las operaciones de depurar las nubes de puntos obtenidas de la operación de explorar el entorno de la realidad; de relacionar entre sí las nubes de puntos depuradas y generar una nube de puntos final; de visualizar la nube de puntos final para eliminar,…
ROBOT CON SISTEMA DE SENSOR PARA DETERMINAR DATOS DE MEDICION TRIDIMENSIONAL.
(04/06/2010) Sistema de sensor basado en un robot, para determinar datos de medición tridimensional de la superficie de un objeto , que comprende:
un robot con un brazo de robot ;
un controlador para provocar que dicho brazo del robot se desplace con respecto a la superficie del objeto ;
un sensor sin contacto dispuesto sobre dicho brazo del robot para recoger datos de imagen representativos de una parte de la superficie del objeto ;
un dispositivo indicador de posición para indicar datos de posición representativos de la posición de dicho sensor sin contacto ;
un generador de señal de temporización para generar periódicamente y transmitir una señal de sincronización, estando dicho dispositivo indicador de posición conectado eléctricamente con dicho generador de señal de temporización y configurado para informar de…
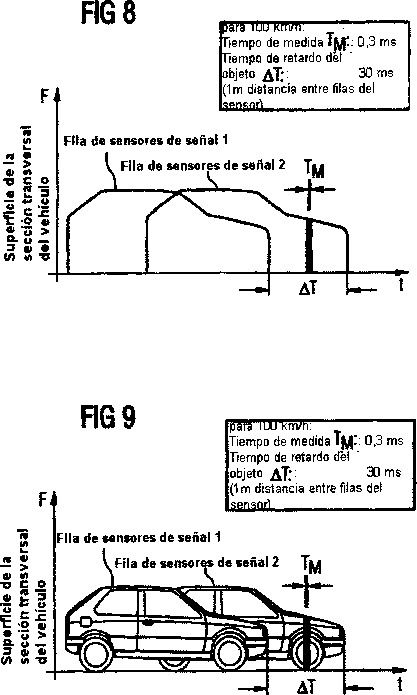
CONFIGURACION Y PROCEDIMIENTO PARA LA MEDICION SIMULTANEA DE LA VELOCIDAD ASI COMO DE LA FORMA DE LA SUPERFICIE DE OBJETOS QUE SE MUEVEN.
(19/11/2009). Ver ilustración. Solicitante/s: SIEMENS AKTIENGESELLSCHAFT. Inventor/es: STOCKMANN, MICHAEL, DOEMENS, GUNTER, DR..
Configuración para medir la velocidad o la forma de la superficie de objetos que se han movido o una combinación de ello en base a mediciones de retardo de la luz, caracterizada por
- al menos dos filas de sensores de semiconductor ópticos representados, de un conjunto de elementos de sensor de resolución de lugar, distanciados entre sí y orientados en paralelo, así como dispuestos transversalmente respecto a la dirección de marcha de los objetos , con los que pueden tomarse perfiles de distancia de los objetos ,
- al menos una fuente de luz posicionada en la zona de las filas de sensores de semiconductor para iluminar el objeto con impulsos de luz.
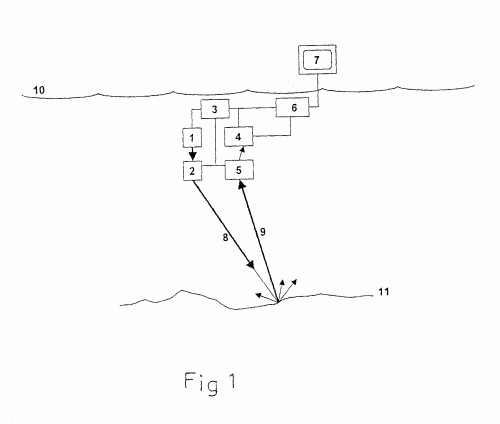
SISTEMA DE VISUALIZACION DE IMAGENES DEL FONDO MARINO.
(01/05/2005). Ver ilustración. Solicitante/s: MUÑOZ LEO,JOSE. Inventor/es: MUÑOZ LEO,JOSE.
Sistema de visualización de imágenes del fondo marino que está constituido por, al menos, una fuente de luz pulsada en forma de haz, un sistema de orientación y puntería de los pulsos luminosos, un detector de la luz de los pulsos reflejada, un dispositivo óptico, acoplado al detector, intensificador/bloqueador selectivamente del paso de la luz, un sistema electrónico de exploración y sincronismo, y un sistema de procesado electrónico generador de una imagen visualizable a través de monitores.
MEDICION DEL DESGASTE DEL REVESTIMIENTO REFRACTARIO DE UN RECIPIENTE METALURGICO.
(16/04/2005) Procedimiento para la identificación y determinación de la posición de un objeto (O), en particular de una vasija metalúrgica , en particular para la medición de su revestimiento refractario, donde un equipo emisor emite una radiación electromagnética, y donde una radiación electromagnética es recibida por un equipo receptor , donde un sistema de determinación de tiempos determina el tiempo de recorrido de un impulso de la radiación electromagnética, y donde la radiación electromagnética pulsante se desvía en dos direcciones perpendiculares entre sí de una forma periódica predeterminada mediante un sistema de desvío , caracterizado porque…
PROCEDIMIENTO DE MEDICION UTILIZANDO LA TECNICA LASER PARA OBJETOS TRIDIMENSIONALES.
(01/03/2004) La invención se refiere a un sistema de medición ayudado por l ser y destinado a los objetos tridimensionales y a superficies complejas. Según la invención, se entiende como objetos tridimensionales, preferentemente, espacios interiores de construcciones o cavidades geológicas con superficies complejas. La invención constituye una importante aportación a la racionalización y a la mejora de la precisión de tales operaciones de medición. En el procedimiento de duración de impulso conocida, la distancia se mide mediante un impulso de l ser enviado por el emisor sobre el punto de medición que después retorna. La emisión de impulsos de l ser genera un abanico de medición. Según la invención, el abanico de medición se debe girar 360º, paso a paso a una velocidad constante para detectar un espacio tridimensional. Sobre una pared, se pueden obtener…
SISTEMA DE MEDICION DE LA DISTANCIA DE RESOLUCION LOCAL.
(01/03/2004). Solicitante/s: SIEMENS AKTIENGESELLSCHAFT. Inventor/es: DOEMENS, GUNTER, DR., MENGEL, PETER, DR.
Sistema de medición de la distancia, con el que se pueden realizar mediciones del tiempo de propagación de la luz por puntos de imagen, que está constituido por: - una disposición uni o bidimensional de fuentes de luz que pueden ser moduladas, - un convertidor de imágenes en estado sólido con elementos de recepción , que presentan, con respecto a la disposición una correspondencia con las fuentes de luz , - una óptica para la conducción de los rayos de iluminación y de los rayos de reproducción entre fuentes de luz que pueden ser activadas en serie, de forma individual o por grupos, con puntos de objetos correspondientes y con elementos de recepción activados de manera correspondiente a las fuentes de luz , donde la distancia desde cada punto de objeto hacia el elemento de recepción correspondiente del convertidor de imágenes en estado sólido se puede determinar con la ayuda de una medición del tiempo de propagación de la luz.
CAMARA DE EXPLORACION DE IMAGENES.
(01/06/1997). Solicitante/s: DORNIER GMBH. Inventor/es: EIBERT, MAX, DR., LUX, PETER.
LA INVENCION DESCRIBE UNA CAMARA PARA SEPARAR IMAGENES QUE TIENE, UNA FUENTE DE LUZ , UN DISPOSITIVO ESCAN BIDIMENSIONAL, UN RECEPTOR PARA LA LUZ REFLEJADA Y UN ANALIZADOR Y CONTROLADOR DE LUZ PARA PRODUCIR IMAGENES SEPARADAS Y SE CARACTERIZA PORQUE PARA PRODUCIR UNA SUCESION DE IMAGENES RAPIDAS SE REALIZA LO SIGUIENTE; EXPLORACION MECANICA CON ESPEJOS GIRATORIOS Y ESCANNER DE FIBRAS OPTICAS CON ESPEJOS GIRATORIOS; EMISION Y RECEPCION DE DATOS CON DISPOSICIONES DE DIODOS EMISORES Y RECEPTORES Y DETERMINACION DE CAMPOS DE DIODOS RECEPTORES Y CAMPOS DE DIODOS LASER CONTROLADOS ELECTRONICAMENTE.
{kind=link}
{kind=link}