Equipo modular y desmontable para la clasificación automática en bolsas de paquetes.
Equipo para la clasificación de paquetes que comprende un soporte de receptáculos y al menos un carro robot lanzadera móvil (1) mandado en desplazamiento a distancia por una unidad de control/mando (13) dispuesta para llevar el carro robot lanzadera a un punto de carga (4) donde un paquete (3) a clasificar está posado sobre el carro robot lanzadera y,
a continuación, desplazar este carro robot lanzadera con el paquete hacia uno de los receptáculos determinado por dicha unidad en función de una indicación de clasificación leída automáticamente sobre el paquete y porque está previsto un marcado en el suelo (15) dispuesto a lo largo de los módulos de soporte de receptáculos y que es detectable por el robot lanzadera durante su desplazamiento a lo largo de estos módulos de soporte de receptáculos, caracterizado porque el soporte de receptáculos es de estructura modular con unos módulos (2A, 2B, 2C) montados cada uno sobre unas ruedecillas de freno (60) y que están dispuestos para estar acoplados entre sí de forma desmontable por encastre o encaje.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2016/051661.
Solicitante: SOLYSTIC.
Nacionalidad solicitante: Francia.
Dirección: 152-160 avenue Aristide Briand 92220 Bagneux FRANCIA.
Inventor/es: MIETTE,EMMANUEL, GARNIER,THIERRY, CHIROL,LUC.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B07C3/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B07 SEPARACION DE SOLIDOS; CLASIFICACION. › B07C CLASIFICACION POSTAL; CLASIFICACION DE OBJETOS INDIVIDUALES O DE UN MATERIAL A GRANEL MANIPULABLE PIEZA POR PIEZA COMO OBJETOS INDIVIDUALES (especialmente adaptada a un fin determinado previsto en otra clase, ver la clase apropiada, p. ej. A43D 33/06, B23Q 7/12). › B07C 3/00 Clasificación de correo o documentos según el destino. › Aparatos caracterizados por los medios utilizados con vistas a la distribución.
- B07C5/36 B07C […] › B07C 5/00 Clasificación según una característica o una particularidad de los objetos o del material a clasificar, p. ej. clasificación controlada por un dispositivo que detecta o mide esta característica o particularidad; Clasificación con ayuda de dispositivos manuales, p. ej. sistemas de agujas (clasificación exclusivamente manual B07C 7/00; separación de diferentes sólidos unos de otros por cribado, tamizado o utilización de corrientes de gas, u otra separación por vía seca para materiales a granel B07B; selección de monedas G07D). › Aparatos clasificadores caracterizados por los medios que utilizan en vista de la distribución.
PDF original: ES-2784901_T3.pdf
Fragmento de la descripción:
Equipo modular y desmontable para la clasificación automática en bolsas de paquetes
Campo técnico
La invención se refiere al campo de la clasificación postal y, más particularmente, a un equipo para la clasificación en bolsas de paquetes.
Técnica anterior
Actualmente, la clasificación a flujo reducido de los paquetes está escasamente automatizada en los centros de clasificación.
En el presente documento, se entiende por flujo reducido, un flujo que puede alcanzar hasta tres mil paquetes por hora.
Este tipo de clasificación está, generalmente, efectuado manualmente por unos Operarios especializados que extraen uno a uno los paquetes desde un punto de extracción, que reconocen visualmente un destino puesto sobre un paquete que se ha extraído, luego, en función de un cierto plan de clasificación, determinan la bolsa de clasificación en la cual se debe depositar el paquete. Las bolsas de clasificación se pueden recuperar, a continuación, para una distribución según la ronda del cartero o también vaciarse para un nuevo pase de clasificación de los paquetes.
De este modo, la cadencia de clasificación de los paquetes en estos centros de clasificación depende esencialmente del número de Operarios que trabajan y de su aptitud para clasificar los paquetes en las bolsas en función del plan de clasificación.
Se comprenderá, igualmente, que el cambio de planes de clasificación en cada pase de clasificación solicita un esfuerzo de concentración consecuente a los Operarios, lo que puede conllevar unos errores de clasificación.
Por otro lado, este tipo de equipo moviliza una superficie de suelo importante en un centro de clasificación el cual no puede ser explotado para otras tareas.
Existen, igualmente, unos equipos semiautomatizados para la clasificación de paquetes, por ejemplo, tal como se describe en la patenteWO2014/057182, que comprenden un soporte de receptáculo, así como una pluralidad de carros lanzaderas móviles y mandados a distancia de un punto de carga de paquetes hacia un receptáculo de descarga de paquetes.
Exposición de la invención
La finalidad de la invención es, por lo tanto, remediar estos diferentes inconvenientes.
Para ello, la invención tiene como objeto un equipo para la clasificación de paquetes de acuerdo con la reivindicación 1.
La idea en la base de la invención es, por lo tanto, proponer un equipo de clasificación automática para clasificar unos paquetes en unos receptáculos, en particular, en bolsas, que es modular y desmontable en el cual unos robots lanzaderas móviles que se desplazan en el suelo siguiendo un marcado permanente realiza una clasificación automática de los paquetes bajo el mando de una unidad de control/mando en la que está registrado un plan de clasificación. El soporte de bolsas modular y desmontable es fácilmente desplazable por el hecho de que los módulos son rodantes y el conjunto del equipo puede ser guardado rápidamente al final de una operación de clasificación en bolsas, lo que permite explotar el espacio liberado en el centro de clasificación para otra tarea.
Los módulos de soporte ambulantes pueden, en particular, ser desplazados rápidamente en la instalación o en la desinstalación por unos Operarios o por los robots lanzaderas bajo el mando de la unidad de control/mando.
Por lo tanto, esta disposición según la invención permite reducir los costes de explotación de este tipo de instalación optimizando la utilización del espacio en un centro logístico de clasificación postal. El equipo según la invención puede ventajosamente presentar las siguientes particularidades:
- dichos módulos de soporte de receptáculos pueden estar dispuestos según dos filas paralelas y estar conectados mecánicamente entre sí por unos tubos de conexión encajables en forma de U invertida.
- dicho marcado en el suelo puede estar dispuesto entre las dos filas paralelas de módulos de soporte de receptáculos.
- cada módulo de soporte de receptáculo y cada carro lanzadera han visto cada uno del lado lateral la forma de un pescante con un poste y una cubierta, estando el pescante del carro y el pescante del soporte dispuestos para imbricarse mutuamente el uno en el otro.
Los receptáculos son, en particular, unas bolsas, pero se pueden reemplazar por unos contenedores u otro receptáculo que se pueden fijar sobre los módulos de soporte y que pueden recepcionar los paquetes clasificados por los robots lanzaderas.
Descripción resumida de los dibujos
La presente invención se comprenderá mejor y otras ventajas se pondrán de manifiesto con la lectura de la descripción detallada de un modo de realización tomado a título de ejemplo de ninguna manera limitativo e ilustrado por los dibujos adjuntos, en los cuales:
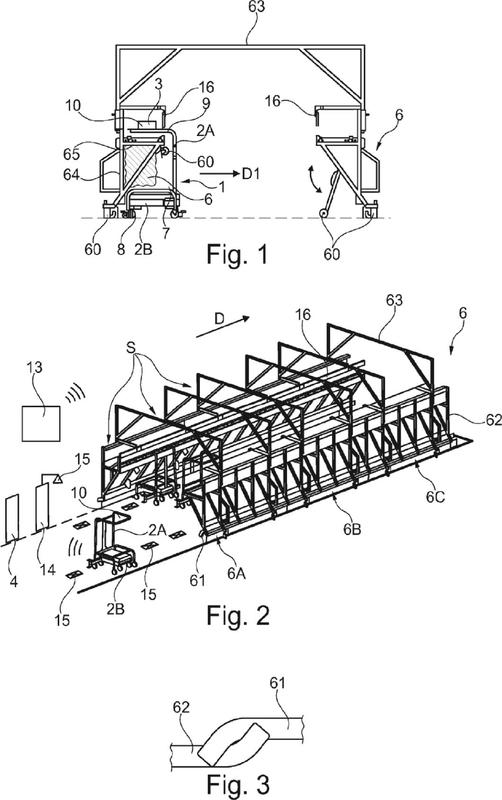
- la figura 1 muestra en vista de lado lateral unos módulos de soporte de bolsas y un carro lanzadera.
- la figura 2 es una vista global en perspectiva de un equipo según la invención que comprende dos filas de módulos de soporte de bolsas.
- la figura 3 ilustra un sistema de acoplamiento de módulos que es fácilmente desmontable.
Descripción de unos modos de realización
El equipo de clasificación según la invención está concebido para clasificar a flujo reducido unos objetos postales no mecanizables de tipo paquetes.
Con referencia a las figuras 1 y 2, el equipo de clasificación según la invención comprende uno o varios carros-lanzaderas 1 constituidos cada uno por un carro 2A para el porte de un paquete 3 y por un robot lanzadera 2B para el desplazamiento del paquete 3 posado sobre el carro 2A.
El carro 2A y la lanzadera 2B pueden estar previstos para ser ensamblables o no. En el presente documento, el carro está montado sobre ruedecillas.
Cada robot lanzadera 2B es un robot lanzadera autónomo capaz de desplazarse en el suelo para realizar una clasificación automática de paquetes entre un punto de carga 4 de los paquetes 3 mostrado en la figura 2 y unos puntos de depósito S de los paquetes que constituyen unas salidas de clasificación donde están dispuestas, en el presente documento, unas bolsas suspendidas abiertas sobre la parte de arriba.
Como es visible en la figura 1, cada carro 2A tiene de perfil la forma de un pescante y, en el presente documento, una forma en U acostada que forma un poste de pescante 7 por encima de las ruedecillas 8 de la lanzadera motorizada 2B y una cubierta de pescante 9 sobre la que está fijada una placa 10 de porte horizontal para un paquete 3.
Por otro lado, el equipo según la invención comprende un soporte de bolsas 6 que presenta una estructura modular con unos módulos 6A, 6B, 6C tubulares montados cada uno sobre unas ruedecillas de freno 60 para ser fácilmente desplazable en el suelo, por ejemplo, entre una zona de almacenamiento y guardado y una zona de clasificación.
Según la invención, estos módulos de soporte de bolsas, tales como 6A, 6B, 6C están dispuestos para estar acoplados fácilmente entre sí en línea según la dirección D de manera desmontable por encastre o encaje.
La figura 3 muestra un sistema de acoplamiento por encastre de dos módulos adyacentes, en el presente documento, constituido por dos patas recurvadas 61, 62 que se entrelazan, estando estas dos patas previstas respectivamente sobre los flancos de los dos módulos adyacentes.
Las figuras 1 y 2 muestran también un sistema de acoplamiento en dos filas paralelas de los módulos de soporte de bolsas, en el presente documento, constituido por tubos de conexión 63 encajables en forma de U.
Como es visible en la figura 1, cada módulo tiene de perfil la forma de un pescante con un poste de pescante 64 y una cubierta de pescante 65 que porta en suspensión una bolsa 6 abierta sobre la parte de arriba.
Los carros lanzaderas 1 y el soporte de bolsa modular 1 están diseñados de tal manera que la cubierta de pescante 9 de un carro lanzadera se imbrica por encima de la cubierta de pescante 65 de un módulo de soporte de bolsa, lo que hace que un paquete 3 posado sobre una placa 10 de un carro lanzadera puede llevarse sobresaliendo de la abertura de una bolsa 6, como se ilustra en la figura 1 y puede caer por gravedad en esta bolsa, como se explica más adelante.
Más particularmente, como se ilustra en la figura 1, está previsto en cada módulo de soporte de bolsa un medio de retención 16 por encima de la cubierta de pescante 65 que deja un espacio para el paso de la cubierta de pescante 9 de un carro lanzadera y que retiene el objeto...
Reivindicaciones:
1. Equipo para la clasificación de paquetes que comprende un soporte de receptáculos y al menos un carro robot lanzadera móvil (1) mandado en desplazamiento a distancia por una unidad de control/mando (13) dispuesta para llevar el carro robot lanzadera a un punto de carga (4) donde un paquete (3) a clasificar está posado sobre el carro robot lanzadera y, a continuación, desplazar este carro robot lanzadera con el paquete hacia uno de los receptáculos determinado por dicha unidad en función de una indicación de clasificación leída automáticamente sobre el paquete y porque está previsto un marcado en el suelo (15) dispuesto a lo largo de los módulos de soporte de receptáculos y que es detectable por el robot lanzadera durante su desplazamiento a lo largo de estos módulos de soporte de receptáculos, caracterizado porque el soporte de receptáculos es de estructura modular con unos módulos (2A, 2B, 2C) montados cada uno sobre unas ruedecillas de freno (60) y que están dispuestos para estar acoplados entre sí de forma desmontable por encastre o encaje.
2. Equipo según la reivindicación 1, caracterizado porque dichos módulos de soporte de receptáculos están dispuestos según dos filas paralelas y están conectados mecánicamente entre sí por unos tubos de conexión (63) encajables en forma de U invertida.
3. Equipo según la reivindicación 2, caracterizado porque dicho marcado en el suelo (15) está dispuesto entre las dos filas paralelas de módulos de soporte de receptáculos.
4. Equipo según una de las reivindicaciones 1 a 3, caracterizado porque los receptáculos son unas bolsas.
5. Equipo según la reivindicación 4, caracterizado porque cada módulo de soporte de bolsas y cada carro lanzadera han visto cada uno del lado lateral la forma de un pescante con un poste y una cubierta, estando el pescante del carro y el pescante del soporte dispuestos para imbricarse mutuamente el uno en el otro.
Patentes similares o relacionadas:
Procedimiento de recogida de objetos con robots lanzadera, del 22 de Abril de 2020, de SOLYSTIC: Procedimiento de procesamiento de objetos en un centro logístico que comprende una zona de almacenaje de los objetos dividida en segmentos de almacenaje adyacentes […]
Clasificación de aleaciones de aluminio mediante valores de conductividad eléctrica, del 15 de Abril de 2020, de Hydro Aluminium Recyling Deutshland GmbH: Procedimiento para clasificar aleaciones de aluminio en chatarra de aluminio, caracterizado por que las chatarras de aluminio se suministran a una estación de medición, […]
Sistema para embalaje automático de revistas y periódicos para cada vendedor de prensa individual, del 12 de Febrero de 2020, de Klotzner, Stefan: Sistema para embalaje automático de revistas y periódicos que consta de: - un módulo de suministro que se encuentra colocado al comienzo del sistema […]
Procedimiento y sistema para la reducción activa de aceitunas mal posicionadas en las máquinas deshuesadoras, rellenadoras y rodajadoras de aceitunas., del 25 de Noviembre de 2019, de MADUEÑO LUNA, Antonio: Procedimiento y sistema para la reducción de aceitunas mal posicionadas en las máquinas deshuesadoras, rellenadoras y rodajadoras de aceitunas (DRR). Esta invención […]
Aparato de transporte con correa de vacío, del 24 de Julio de 2019, de QUALYSENSE AG: Un aparato para transportar partículas , incluyendo el aparato: una correa transportadora sinfín que tiene una pluralidad de […]
Dispositivo de selección para una máquina de elaboración de resortes y máquinas de elaboración de resortes provistas de dicho dispositivo de selección, del 10 de Julio de 2019, de Simplex Rapid S.r.l: El dispositivo de selección destinado a ser dispuesto aguas abajo de un dispositivo de elaboración de resortes de una máquina de elaboración de resortes, […]
 Soporte de artículos para un aparato de clasificación, del 28 de Junio de 2019, de Compac Technologies Limited: Un soporte de artículos que comprende:
una parte de montaje adaptada para la conexión a un transportador,
un elemento de conexión conectado de manera […]
Soporte de artículos para un aparato de clasificación, del 28 de Junio de 2019, de Compac Technologies Limited: Un soporte de artículos que comprende:
una parte de montaje adaptada para la conexión a un transportador,
un elemento de conexión conectado de manera […]
APARATO DE CLASIFICACIÓN DOTADO DE UNA TOLVA, del 23 de Diciembre de 2011, de VISYS NV: Un aparato de clasificación para clasificar productos que comprende un sistema de suministro para proporcionar productos en una corriente continua a una tolva […]