Método y sistema de calibrado de cartones.
Un sistema (1) de calibrado de cartones que comprende un bastidor (2),
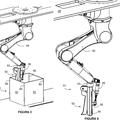
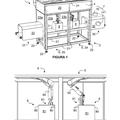
un controlador (4), uno o más cortadores (51, 510) montados de forma móvil en el bastidor (2) y conectados operativamente al controlador (4), uno o más marcadores (61, 610) montados de forma móvil en el bastidor (2) y conectados operativamente al controlador (4) y unos medios de medición (7) conectados operativamente al controlador (4) y configurados para determinar, en uso, la huella de un cartón (8) abierto por arriba y para determinar la altura de uno o más objetos contenidos dentro del cartón (8), en el que el controlador (4) está configurado para colocar el uno o más cortadores (51, 510) basándose en la huella determinada y para cortar unos bordes verticales (80) del cartón (8) basándose en la altura determinada, estando configurado además el controlador (4) para posicionar el uno o más marcadores (61, 610) basándose en la huella y altura determinadas y para rayar o plegar unas paredes verticales (81) del cartón (8) entre los bordes verticales (80) para definir al menos parcialmente unos paneles plegables.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/GB2013/051479.
Solicitante: WestRock Linkx Systems Limited.
Nacionalidad solicitante: Reino Unido.
Dirección: Millenium Way West, Phoenix Centre Nottingham, Nottinghamshire NG8 6AW REINO UNIDO.
Inventor/es: BENTERMAN,DANIEL, HAYWARD,DAVID.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B31B50/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B31 FABRICACION DE ARTICULOS DE PAPEL, DE CARTON O DE MATERIAL TRABAJADO DE FORMA ANÁLOGA AL PAPEL; TRABAJO DEL PAPEL, DELCARTON O DE MATERIAL TRABAJADO DE FORMA ANÁLOGA AL PAPEL. › B31B FABRICACION DE CONTENEDORES DE PAPEL, CARTON O DE MATERIAL TRABAJADO DE FORMA ANÁLOGA AL PAPEL (fabricación de artículos enrollados, p. ej. tubos enrollados, B31C; fabricación y rellenado combinados B65B). › Fabricación de contenedores rígidos o semirrígidos, p. ej. cajones o cajas de cartón.
- B65B59/02 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 59/00 Dispositivos para permitir a las máquinas manipular objetos de diferentes dimensiones, producir paquetes de diferentes tamaños, variar el contenido de los paquetes o dar acceso para la limpieza o el mantenimiento. › Disposiciones para permitir hacer reglajes durante el funcionamiento de la máquina.
PDF original: ES-2780548_T3.pdf
Reivindicaciones:
1. Un sistema (1) de calibrado de cartones que comprende un bastidor (2) , un controlador (4) , uno o más cortadores (51, 510) montados de forma móvil en el bastidor (2) y conectados operativamente al controlador (4) , uno o más marcadores (61, 610) montados de forma móvil en el bastidor (2) y conectados operativamente al controlador (4) y unos medios de medición (7) conectados operativamente al controlador (4) y configurados para determinar, en uso, la huella de un cartón (8) abierto por arriba y para determinar la altura de uno o más objetos contenidos dentro del cartón (8) , en el que el controlador (4) está configurado para colocar el uno o más cortadores (51, 510) basándose en la huella determinada y para cortar unos bordes verticales (80) del cartón (8) basándose en la altura determinada, estando configurado además el controlador (4) para posicionar el uno o más marcadores (61, 610) basándose en la huella y altura determinadas y para rayar o plegar unas paredes verticales (81) del cartón (8) entre los bordes verticales (80) para definir al menos parcialmente unos paneles plegables.
2. Sistema de calibrado de cartones según la reivindicación 1, en el que cada uno del uno o más cortadores (51, 510) y cada uno del uno o marcadores son móviles en tres o más ejes.
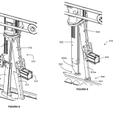
3. Sistema de calibrado de cartones según la reivindicación 1 o la reivindicación 2, en el que el o cada cortador está montado en el extremo de un brazo robótico de un robot cartesiano o un sistema de caballete robótico.
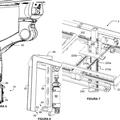
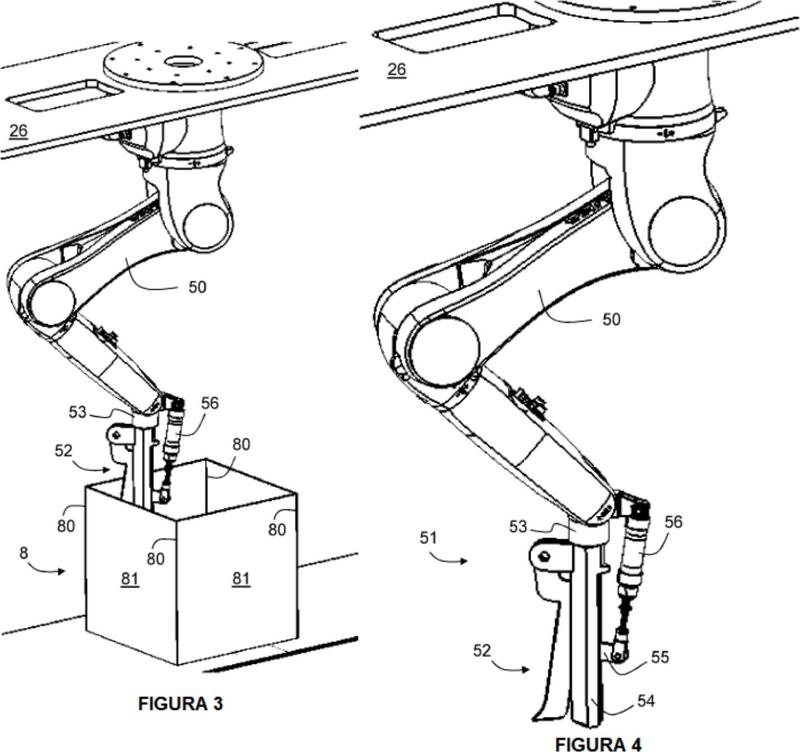
4. Sistema de calibrado de cartones según cualquier reivindicación precedente, en el que el o cada cortador (51) comprende una cuchilla (52) montada de manera móvil en un soporte (53) y una guarda (54) montada en el soporte (53) , en el que la cuchilla (52) es móvil entre una posición desplegada, en la cual una esquina o filo de la cuchilla (52) está expuesto para cortar, y una posición retraída en la que dicha cuchilla está al menos parcialmente cubierta u oculta por la guarda (54) o dentro de la misma.
5. Sistema de calibrado de cartones según cualquier reivindicación precedente, en el que el controlador (4) está configurado para colocar, en uso, el cortador (51, 510) o uno de los cortadores (51, 510) para cortar un primer borde vertical (80) del cartón (8) y luego colocar el mismo cortador (51, 510) para cortar un segundo borde vertical (80) del mismo cartón (8) , diferente del primer borde vertical (80) .
6. Sistema de calibrado de cartones según la reivindicación 5, en el que el controlador (4) está configurado para colocar en secuencia, durante el uso, el cortador en cada uno de los bordes verticales (80) del mismo cartón.
7. Sistema de calibrado de cartones según cualquier reivindicación precedente, en el que el o cada marcador (61, 610) está montado en el extremo de un brazo robótico (60) de un robot cartesiano o un sistema de caballete robótico.
8. Sistema de calibrado de cartones según cualquier reivindicación precedente, en el que el o cada marcador (61) comprende un elemento de cuchilla (62) y un elemento de yunque (64) contra el cual se puede empujar al elemento de cuchilla (62) para crear una marca o línea de plegado o rayado, siendo menor el tamaño del elemento de cuchilla (62) y/o el elemento de yunque (64) que el de la pared del cartón (8) que se ha de plegar de tal modo que se pliegue múltiples veces cada pared de cartón (81) que se ha de plegar.
9. Sistema de calibrado de cartones según cualquier reivindicación precedente, en el que el controlador (4) está configurado para colocar, en uso, el marcador (61, 610) o uno de los marcadores (61, 610) para rayar o plegar una primera pared vertical (81) del cartón (8) y luego colocar el mismo marcador (61, 610) para rayar o plegar una segunda pared vertical (81) del mismo cartón (8) , diferente de la primera pared vertical (81) .
10. Sistema de calibrado de cartones según la reivindicación 9, en el que el controlador (4) está configurado para posicionar, en uso, el marcador (61, 610) para rayar o plegar en secuencia cada una de las paredes verticales (81) del mismo cartón.
11. Sistema de calibrado de cartones según cualquier reivindicación precedente, en el que los medios de medición (7) comprenden un sistema de formación de imágenes (7) configurado para capturar, en uso, una o más imágenes desde una o más posiciones o ángulos y para determinar o medir a partir de la o de cada imagen capturada una o más características o dimensiones del cartón (8) y/o su contenido.
12. Sistema de calibrado de cartones según la reivindicación 11, en el que el sistema de formación de imágenes (7) está configurado para determinar o medir a partir de la o de cada imagen capturada la altura de uno o más objetos contenidos en el cartón (8) y un ancho y una longitud del cartón (8) .
13. Sistema de calibrado de cartones según la reivindicación 11 o la reivindicación 12, en el que el controlador (4) está configurado para determinar o calcular la posición o posiciones y la orientación u orientaciones de cortador requeridas para cortar cada uno de los bordes verticales (80) del cartón basándose en la característica o características o la dimensión o dimensiones determinadas o medidas del cartón (8) y/o su contenido.
14. Sistema de calibrado de cartones según una cualquiera de las reivindicaciones 11 a 13, en el que el controlador (4) está configurado para determinar o calcular la posición o posiciones y la orientación u orientaciones de marcador equeridas para rayar o plegar cada una de las paredes verticales (81) del cartón (8) basándose en la característica o características o la dimensión o dimensiones determinadas o medidas del cartón (8) y/o su contenido.
15. Un método para formar un cartón (8) que comprende los pasos de determinar la huella de un cartón (8) abierto por arriba usando unos medios de medición (7) , determinar la altura de uno o más objetos contenidos dentro del cartón (8) usando los medios de medición (7) , determinar automáticamente la posición de los bordes verticales (80) del cartón (8) sobre la base de la huella determinada utilizando un controlador (4) , determinar automáticamente la altura requerida del cartón (8) sobre la base de la altura determinada del uno o más objetos utilizando el controlador (4) , hacer que el controlador (4) coloque el uno o más cortadores (51, 510) en una posición adyacente a cada uno de los bordes verticales (80) , cortar cada uno de los bordes verticales (80) entre un borde superior del cartón (8) y una posición a la altura requerida del cartón o adyacente a ella, hacer que el controlador (4) coloque el uno o más marcadores (61, 610) en una posición adyacente a cada una de las paredes verticales (81) del cartón y rayar o plegar cada una de las paredes verticales (81) entre los bordes verticales (80) en una posición a la altura requerida del cartón o adyacente a la misma, de tal modo que se definan una o más solapas o paneles plegables en las paredes verticales (81) .
Patentes similares o relacionadas:
Máquina de conversión, del 22 de Abril de 2020, de Packsize, LLC: Un método para formar una plantilla de embalaje para su ensamblaje dando una caja u otro material de embalaje, comprendiendo el método: colocar uno o más artículos […]
Útil de moldeo con coquilla de molde dividida, del 15 de Abril de 2020, de GEA Food Solutions Germany GmbH (100.0%): Útil de embutición profunda para una máquina envasadora destinada a fabricar un cuenco de envasado por embutición profunda de una banda de película , […]
Dispositivos para envasar bandejas, del 29 de Enero de 2020, de Scolaro, Mauro: Un dispositivo para envasar bandejas, que comprende una estación de termosellado y corte para termosellar una película en el borde […]
Reducción del volumen de la cámara por adaptación de la profundidad de embutición en la estación de sellado por medio de una junta inflable, del 1 de Enero de 2020, de GEA Food Solutions Germany GmbH (100.0%): Máquina de envasado con una estación de sellado y/o un dispositivo de corte , con la que se producen envases para productos a envasar, presentando […]
Máquina de embalaje por embutición profunda con soporte de paquetes flexible, del 25 de Diciembre de 2019, de MULTIVAC Sepp Haggenmüller SE & Co. KG: Máquina de embalaje por embutición profunda , que comprende una estación de conformado para fabricar piezas cóncavas de embalaje a partir […]
Procedimiento para el llenado de envases con productos que van cambiando en una máquina llenadora, del 4 de Diciembre de 2019, de SIG TECHNOLOGY AG: Procedimiento para el llenado de envases con productos que van cambiando en una máquina llenadora , en el que los envases se forman a partir de […]
Una máquina de empaquetado mejorada, del 20 de Noviembre de 2019, de SYSTEM CERAMICS S.P.A.: Una máquina de empaquetado, que comprende: una superficie de descanso para soportar una o más piezas (B) en blanco destinados a formar un empaquetado […]
MÁQUINA Y MÉTODO DE EMBALAJE, del 14 de Febrero de 2012, de SEALED AIR CORPORATION (US): Máquina de embalaje para empaquetar productos (P) de varias longitudes para enviar, en el que cada producto se empaqueta al envolver el producto […]